 纯电动环卫车设计实例
纯电动环卫车设计实例
纯电动环卫车作为新能源汽车中的重要部分,大力推进该领域不同类型车型的大力发展,已成为当下新能源汽车领域发展的重要方向。为此,重点对纯电动环卫车的市场概况、结构类型及结构组成、近期公告车型及未来重点开发车型等方向进行了分析,掌握了当前环卫车领域的总体现状,这对后期企业有针对性地开发纯电动环卫车、保障所开发纯电动环卫车具有高性价比具有重点指导作用。
1 环卫车动力经济性设计指标及分析
1.1 纯电动环卫车的动力经济性能指标
本次设计的纯电动环卫车动力经济性能指标主要是最高车速、爬坡性能和综合电耗,其次为加速性能:最高车速Vmax,km/h;最大爬坡度imax;综合工况电耗Q,kWh/100 km;加速时间t,s。
1.2 纯电动环卫车的行驶阻力
根据整车纵向动力学特性,纯电动环卫车在行驶过程中,所受阻力包括空气阻力Fw、滚动阻力Ff、加速阻力Fj及坡道阻力Fi,其驱动力Ft与阻力关系可表示为
Ft=Ff+Fw+Fj+Fi(1)

(2)
考虑到实际上正常道路的坡道角不大,cosα≈1,sinα≈tanα,常将上式写为

(3)
式中,Tm为驱动电机扭矩;ig为变速器传动比;i0为主减速器传动比;ηT为传动系统效率;m为环卫车总质量;r为轮胎滚动半径;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;α为坡道角;δ为旋转质量换算系数;u为车速;ua为环卫车与空气相对速度(风速为0时,ua=u)[1]。
1.3 纯电动环卫车的功率平衡
纯电动环卫车行驶过程中,电机的有效功率和行驶阻力功率相互平衡。假定风速为0,其驱动功率Pm与阻力平衡关系可表示为

(4)
电机的额定功率应满足整车对最高车速的要求,额定功率应不小于车辆以最高车速平路匀速行驶时的阻力功率,同时考虑电机的过载要求[2]。
即
(5)
电机的峰值功率应能满足车辆的爬坡性能要求,即
(6)
电机的峰值功率也应满足车辆的加速性能要求,即

(7)
式中,uf为加速后的车速,m/s;ub为驱动电机额定转速对应的车速,m/s;ρα为空气密度;tα为预期加速时间,s;δ为旋转质量换算系数[3]。
1.4 纯电动环卫车的最高车速
纯电动环卫车的最高车速是指在水平良好的路面(混凝土或沥青)上环卫车能达到的最高行驶车速。最高车速计算公式为
(8)
确定最高车速时,需要同时考虑功率平衡(式(5)),联合得出最高车速。
1.5 纯电动环卫车的加速时间
纯电动环卫车加速时间表示其加速能力,分为原地起步加速时间和超车加速时间。本文提到的纯电动环卫车由于其低速作业特性,只关注其原地起步加速时间,且加速时间不作为重点关注指标。计算公式为
(9)
式中,a为车辆直线行驶加速度,m/s2。
1.6 纯电动环卫车的最大爬坡度
纯电动环卫车的最大爬坡度一般指满载良好路面I挡最大爬坡度。爬坡度用坡道角正切值的百分比表示,计算公式为

(10)
1.7 纯电动环卫车的综合工况电耗
本次设计的纯电动环卫车的经济性采用综合工况下车辆行驶百公里的耗电量来衡量。
在进行纯电动环卫车设计时,先根据整车总体性能指标,设定动力性、经济性目标参数,再据此选定动力链系统参数[4]。
2 纯电动环卫车设计实例
以某款纯电动环卫车为例,该车组成如图1所示。
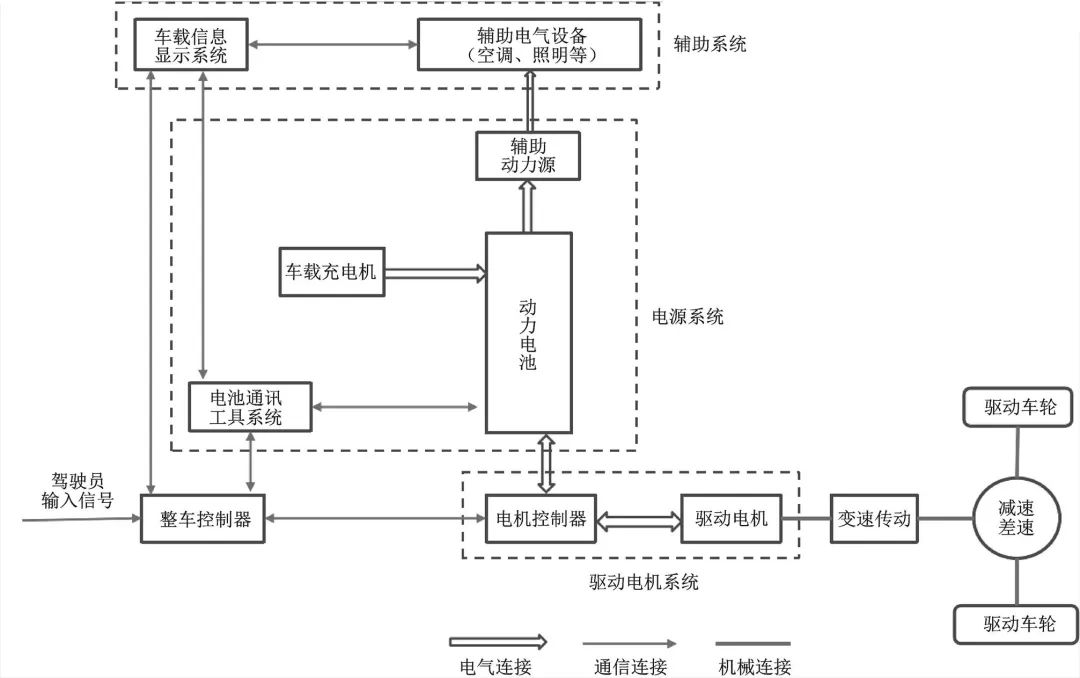
图1 某纯电动环卫车组成
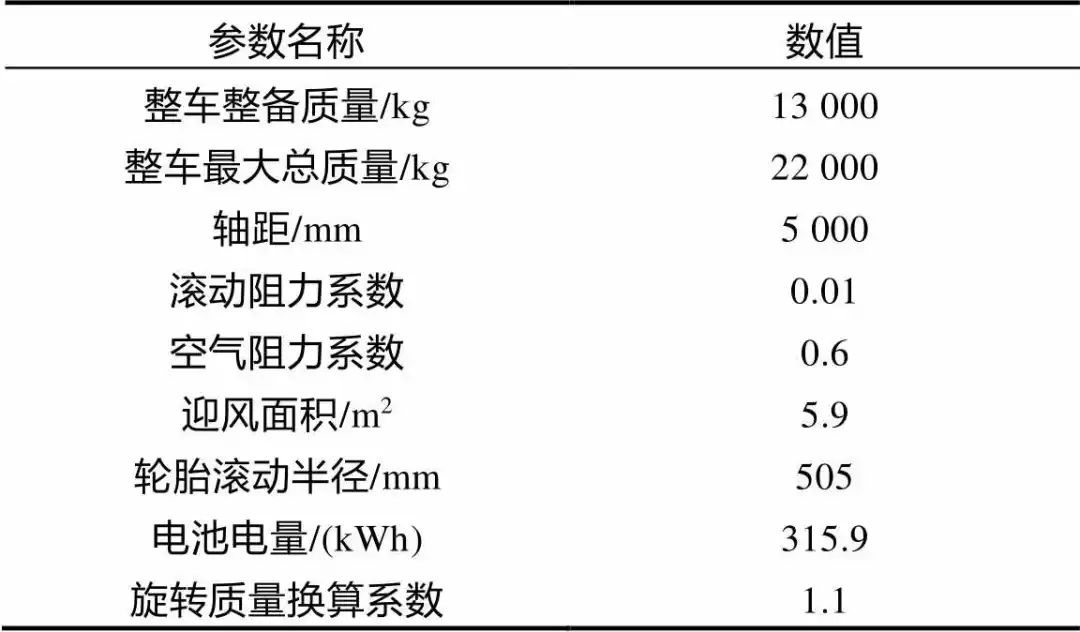
整车参数如表1所示。
表1 某纯电动环卫车整车参数
整车性能要求:
1)最高车速Vmax=89 km/h;
2)最大爬坡度imax≥20%;
3)综合工况电耗Q<100 kWh/100 km;
4)0~30 km/h加速时间t≤15 s。
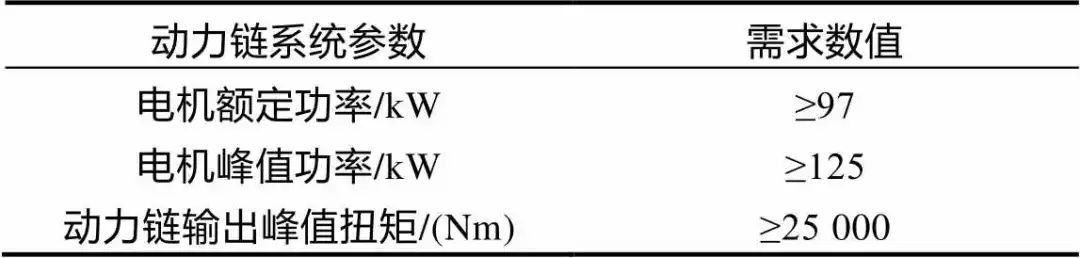
2.1 纯电动环卫车的动力需求
根据式(5)可得,动力需求额定功率P额=97 kW;
根据式(6)、式(7)可得,动力需求额定功率P峰=125 kW;
根据式(3)可得,动力需求峰值扭矩T峰= 25 000 Nm。
根据以上计算结果,确定动力链需求如表2所示。
表2 某纯电动环卫车动力链需求
2.2 纯电动环卫车的路谱采集
选取主销区域环卫车典型作业行驶工况,利用speedbox车载记录仪跟车采集环卫车路谱数据,作为车辆仿真输入,开展整车动力性和经济性分析。
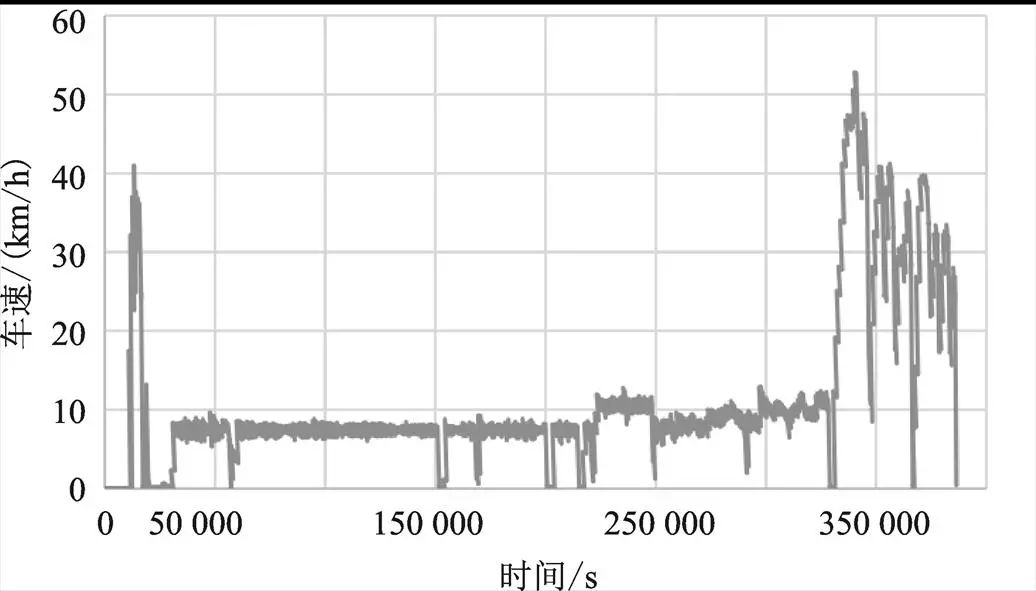
图2 环卫车实车路谱
2.3 纯电动环卫车的动力链技术路线
根据纯电动环卫车整车动力需求,充分考虑电驱桥、中央直驱、双电机3种技术路线,共匹配8条动力链方案,如图3所示。
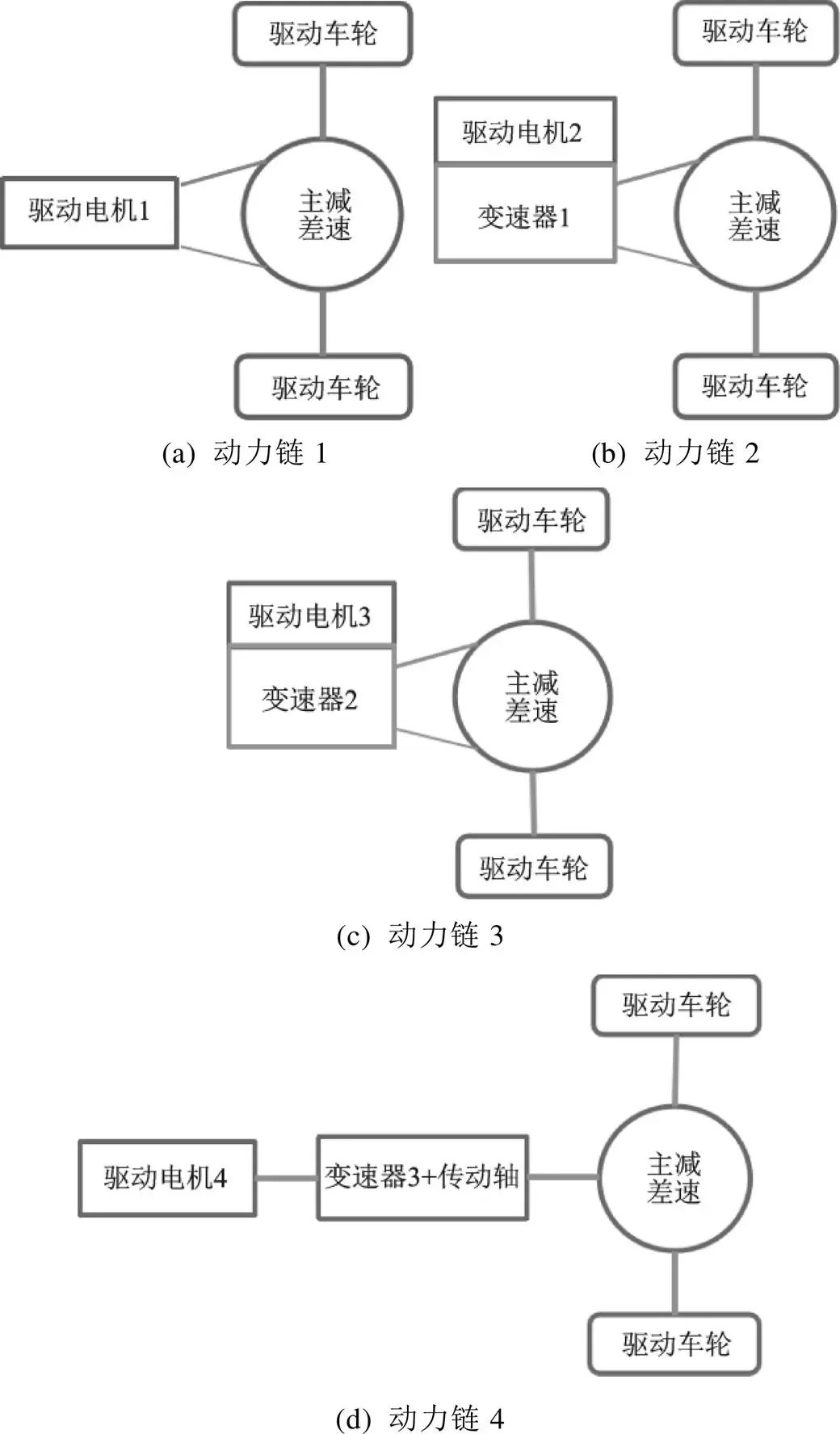
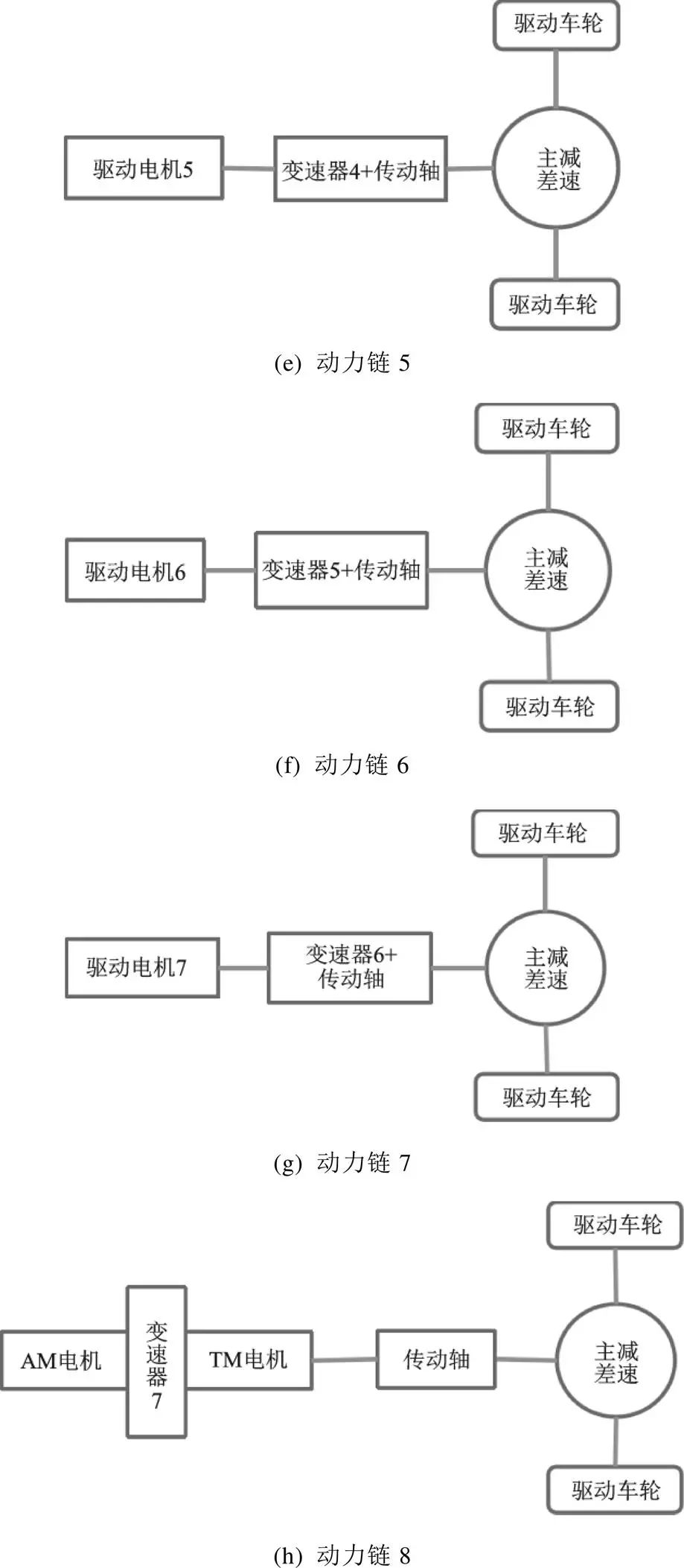
图3 8种动力链方案
技术路线一:从整车降重和提升动力链效率出发,匹配电驱桥方案,初选3条电驱动桥动力链,其中,第1条为电机直接与驱动桥主减速器集成,未增加变速器,动力性较弱,且应用较少;第2、3条电驱动桥动力链为电机+4AMT+驱动桥集成方案,路况适应性好,动力较强。
技术路线二:从动力链总体成熟度与可靠性出发,初选4条中央直驱动力链方案,其中,第4、5、6条为电机+6AMT+传动轴+驱动桥组合,仅对电机+6AMT进行优化匹配,动力强劲,可靠性高;第7条为电机+4AMT+传动轴+驱动桥组合,爬坡稍逊于6挡,但有成熟应用案例。
技术路线三:从竞品对标角度出发,针对某竞品双电机技术方案,选型某成熟双电机动力链,由于电控非自主提供,成本较高,且爬坡性能稍逊于直驱。
2.4 纯电动环卫车的多动力链配置计算
根据该纯电动环卫车整车和各总成部件参数,基于Cruise工具软件,建立如图4所示的整车仿真模型,输入整车及电机、动力电池等各功能模块参数,并添加机械、电气、总线信息连接。
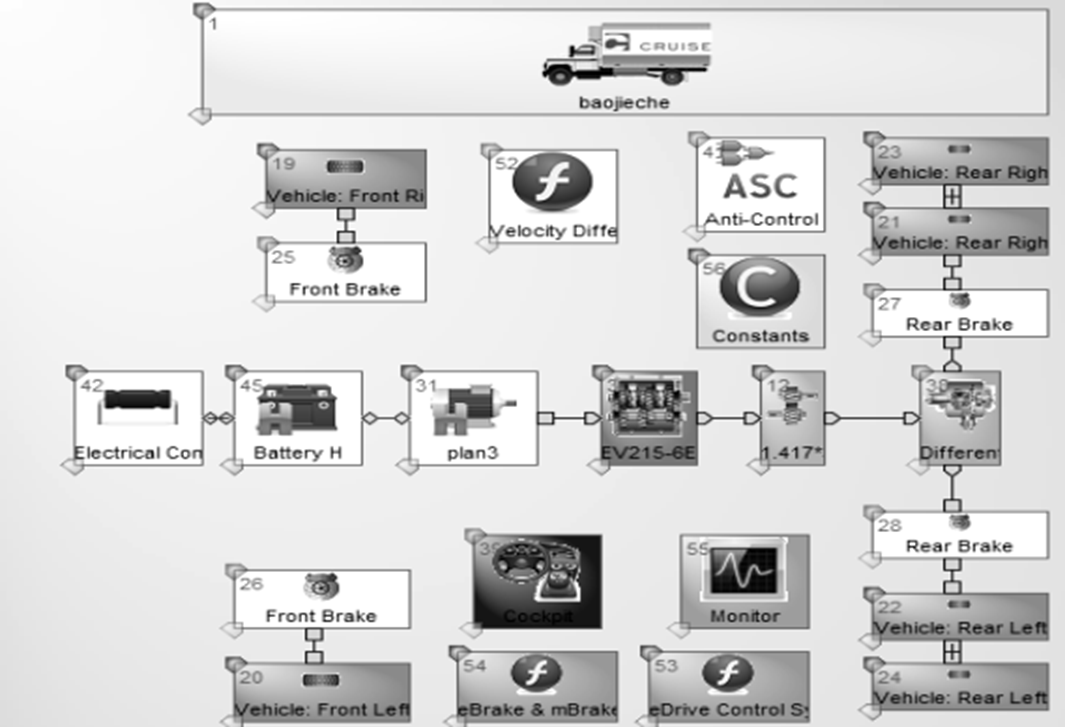
图4 某纯电动环卫车Cruise仿真模型
模块之间的机械连接完成后建立总线信息连接,如图5所示。
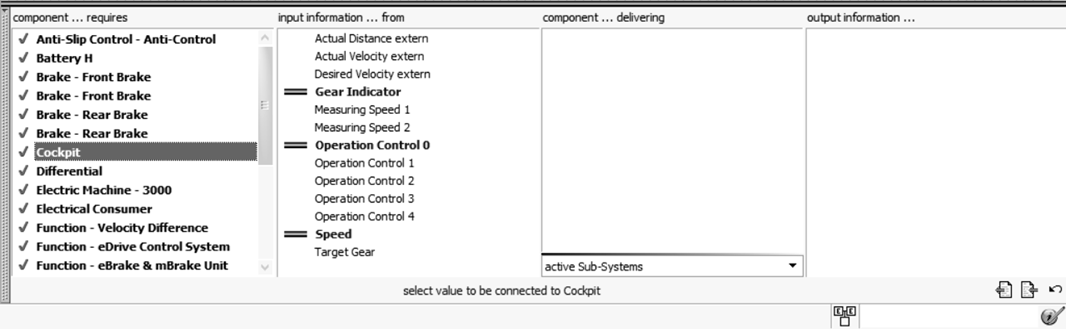
图5 某纯电动环卫车模型信号连接
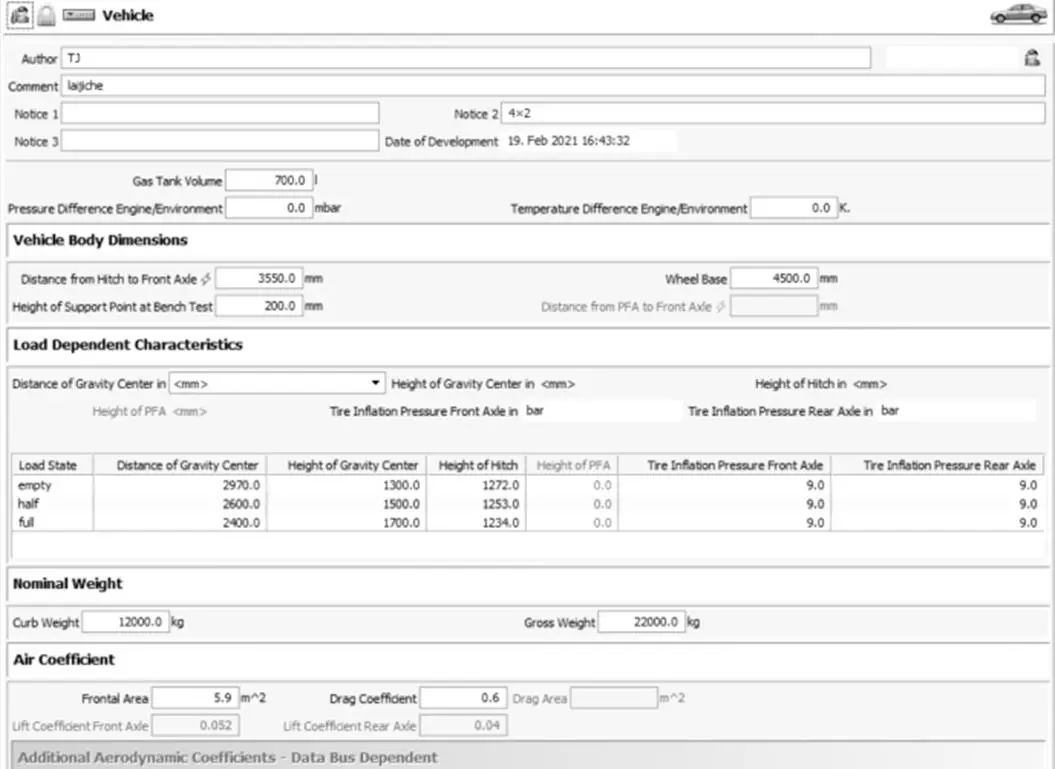
图6 某纯电动环卫车模型参数输入
模块之间的机械连接和总线信息连接完成后,需要设置模型中各模块参数,这些参数其实在前期整车方案设计过程中已经完成了梳理,可直接填入。如图6所示为整车参数的设置。
表3 电驱动桥技术路线动力链仿真参数
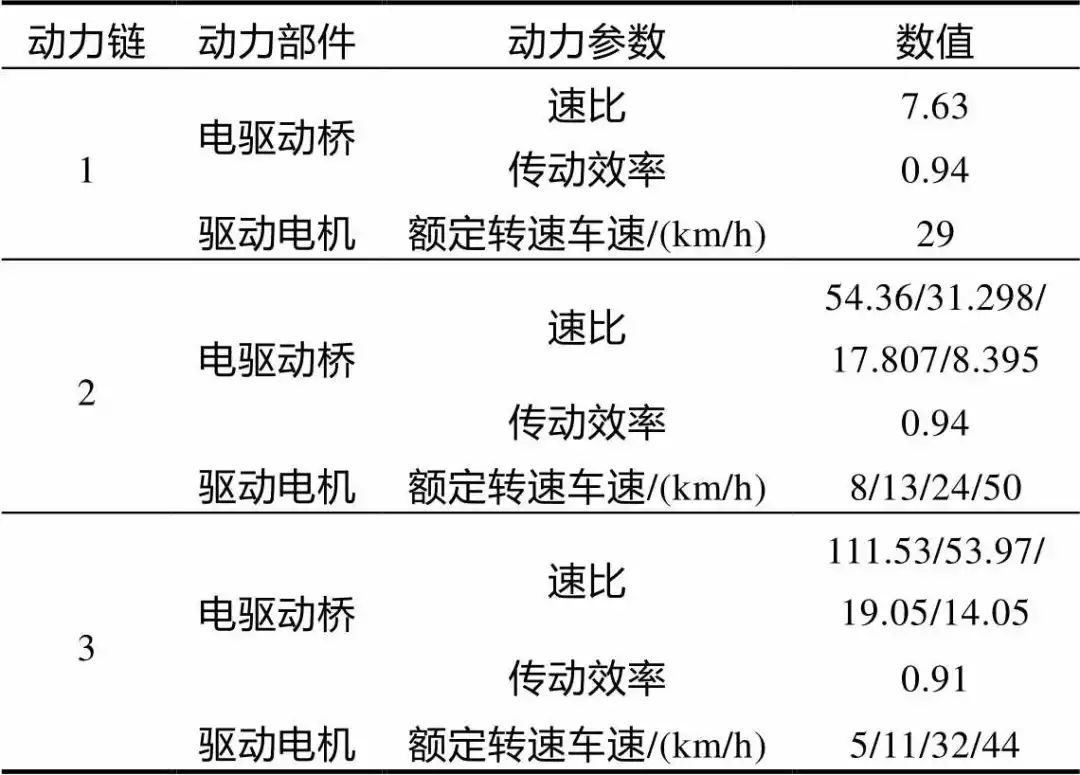
表4 中央直驱技术路线动力链参数
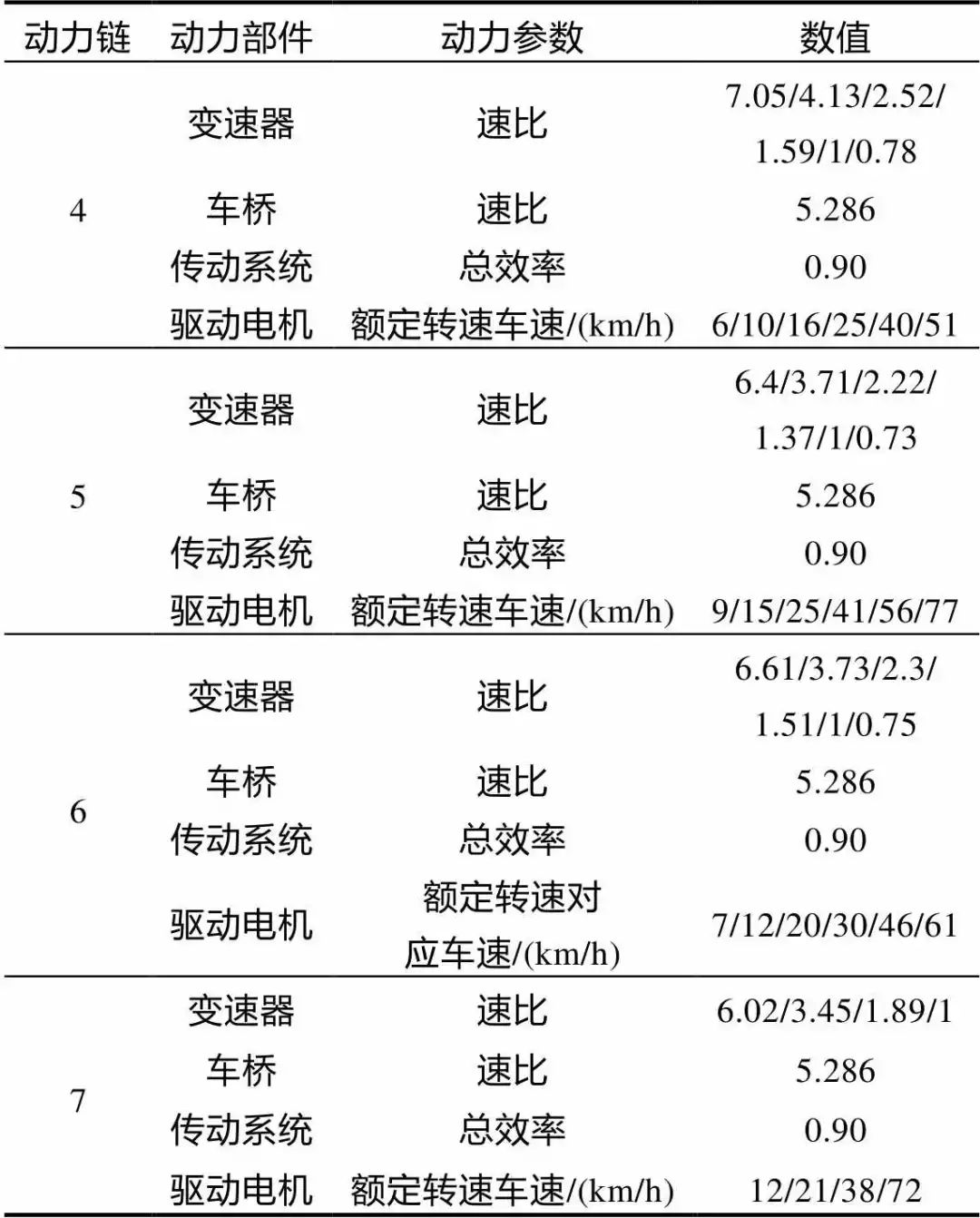
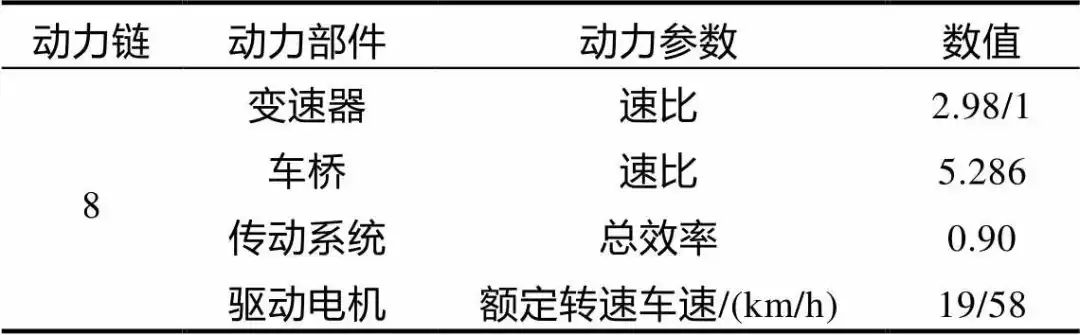
基于图3多动力链配置方案,3种技术路线对应的仿真计算所用动力链参数如表3-表5所示。
表5 双电机技术路线动力链参数
基于以上参数输入,分别设置最高车速、爬坡性能计算任务;然后,结合环卫车实采路谱,定义循环作业工况,设定百公里电耗计算任务。经过计算,可得该纯电动环卫车不同动力链动力性能及百公里综合电耗。
汇总上述计算结果,同时整理8条动力链重量、成本数据,如表6所示。
表6 某纯电动环卫车多动力链性能
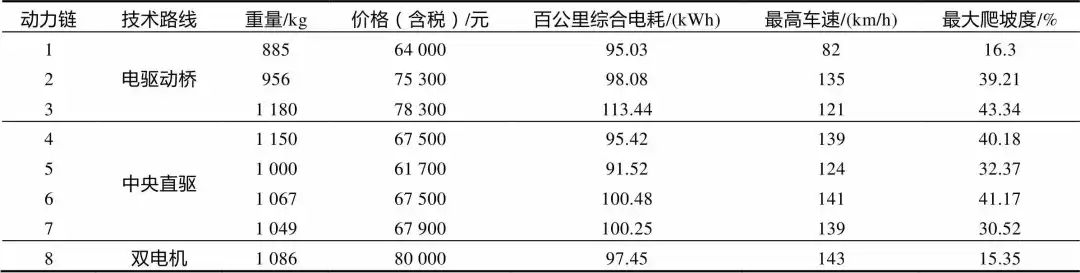
注:表中价格仅用于方案对比。
从表中数据可以看出,动力链1动力参数不满足整车要求(其中最高车速要求89 km/h,爬坡≥20%),故不采用;
动力链2和3电驱动桥方案,由于其系统匹配尚不成熟,成本太高且电耗及重量不具备竞争优势,在本次产品设计中暂不采用;
动力链4、5、6、7中央电驱动力链方案为本次优化的重点,在设计过程中,对电机和变速器均进行了优化选型,提高电机高效区同时控制成本同时采用多挡方案。动力链5就是在控制成本、质量基础上,选择了map优于其余3条动力链的高效电机,电机高效区范围增加的同时,成本和重量控制最低,为本次动力链设计最优化方案。电机系统map如图7所示。
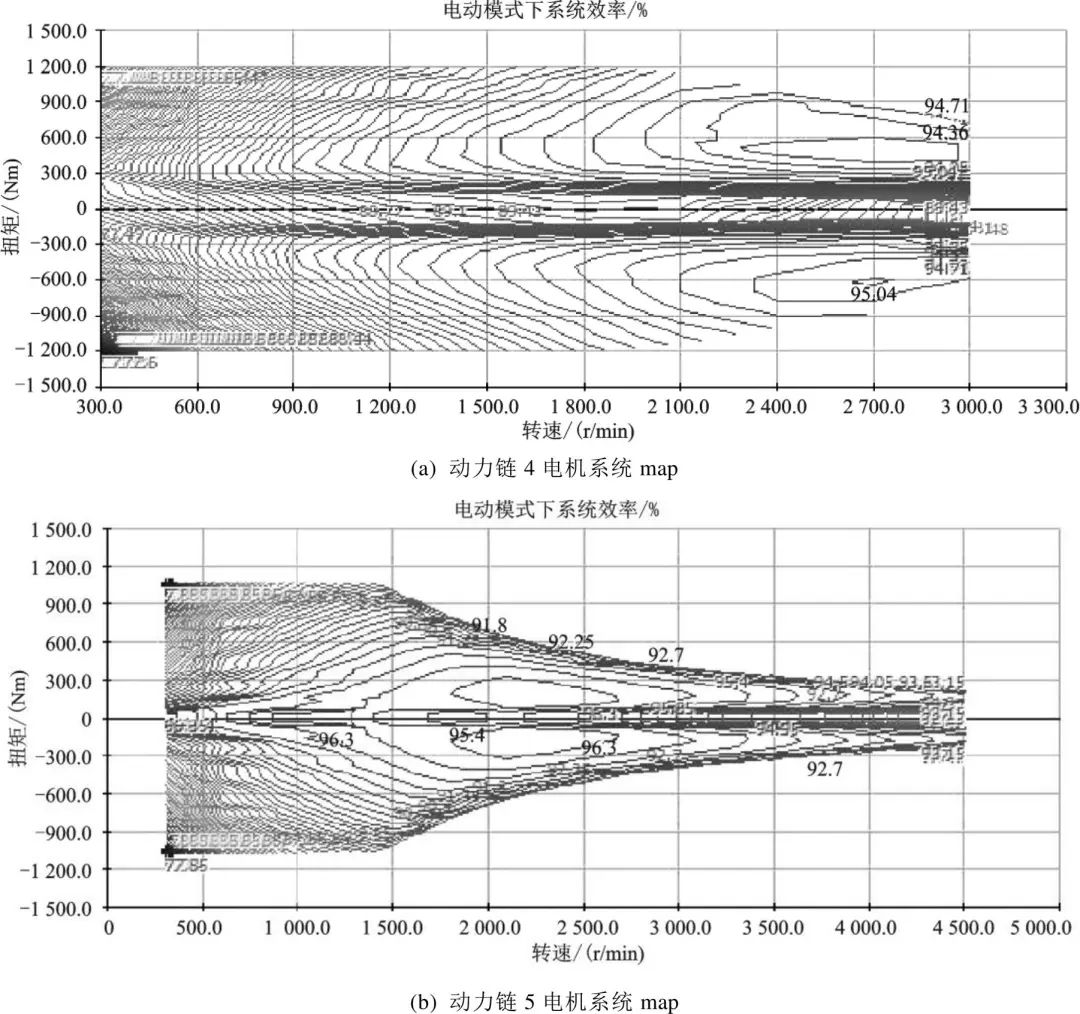
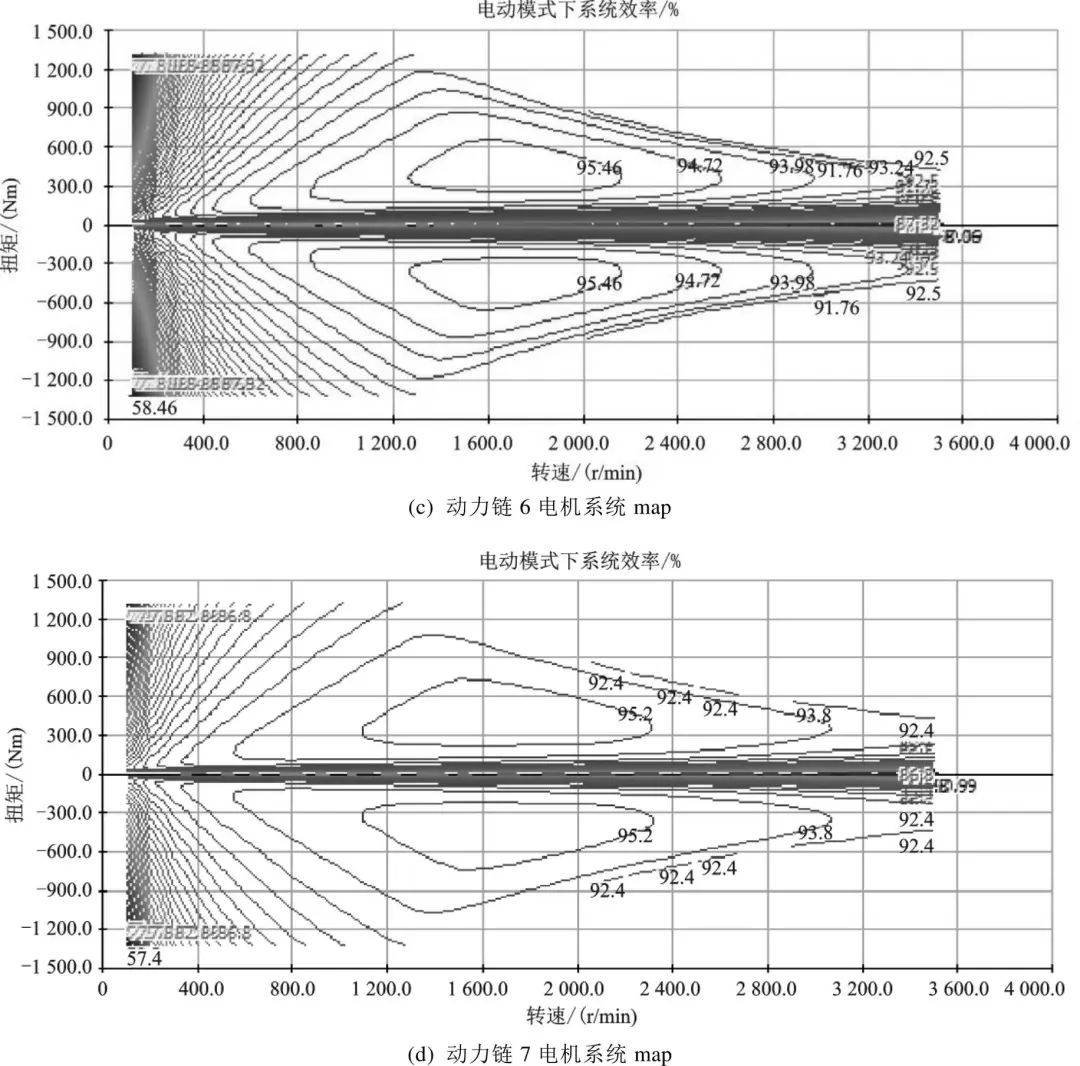
图7 某纯电动环卫车部分动力链电机系统map
动力链8为某竞品车型方案,考虑竞品为自主开发系统,忽略动力链成本和重量数据,仅从表6中动力经济性可以看出,竞品方案并不具备绝对优势。
综上,经过动力链匹配优化,确定动力链5为本次纯电动环卫车整车动力链。
3 结论
本文根据某纯电动环卫车动力经济性能指标,通过理论计算,初步选型动力链系统参数,然后结合实车路谱采集,建立该纯电动环卫车仿真模型,完成多动力链配置动力经济性验证,最后,从动力经济性、成本、质量等方面综合分析,确定最佳动力链配置组合。
审核编辑:汤梓红
-
新能源汽车
+关注
关注
141文章
10698浏览量
100560 -
电机
+关注
关注
143文章
9137浏览量
146934 -
额定功率
+关注
关注
0文章
85浏览量
16721
原文标题:纯电动环卫车动力链匹配分析
文章出处:【微信号:EDC电驱未来,微信公众号:EDC电驱未来】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论