 FreeRTOS中断测试避坑指南
FreeRTOS中断测试避坑指南
FreeRTOS中断简介
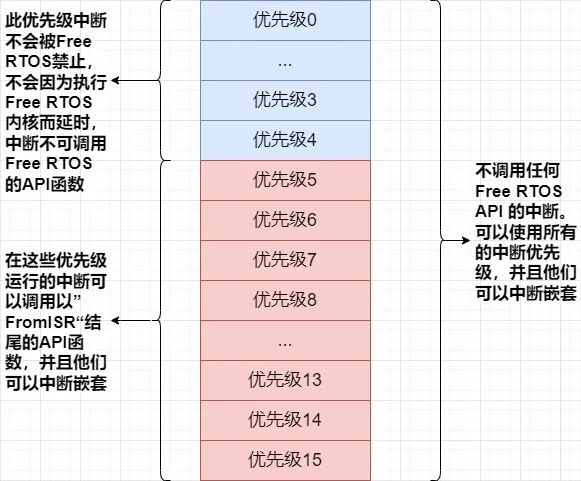
任何调用中断安全FreeRTOS API函数的中断服务例程都可以使用的最高中断优先级。不要从任何优先级高于此的中断调用中断安全FREERTOS API函数(优先级越高,数值越低)。
代码如下(版本FreeRTOS V202107.00):
/*Cortex-M specific definitions.*/ #ifdef __NVIC_PRIO_BITS /*__BVIC_PRIO_BITS will be specified when CMSIS is being used.*/ #define configPRIO_BITS__NVIC_PRIO_BITS #else #define configPRIO_BITS4/*15 priority levels*/ #endif /*The lowest interrupt priority that can be usedina call to a"set priority" function.*/ #define configLIBRARY_LOWEST_INTERRUPT_PRIORITY0xf /*The highest interrupt priority that can be used by any interrupt service routine that makes calls to interrupt safe FreeRTOS APIfunctions.DO NOT CALL INTERRUPT SAFE FREERTOS API FUNCTIONS FROM ANY INTERRUPT THAT HAS A HIGHER PRIORITY THAN THIS!(higher priorities are lower numeric values.*/ #define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 /*Interrupt priorities used by the kernel port layer itself.These are generic to all Cortex-M ports,anddonot rely on any particular libraryfunctions.*/ #define configKERNEL_INTERRUPT_PRIORITY(configLIBRARY_LOWEST_INTERRUPT_PRIORITY<< (8 - configPRIO_BITS) ) /* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!! See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */ #define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
configMAX_SYSCALL_INTERRUPT_PRIORITY 高于此优先级的中断,不能被禁止。
测试过程
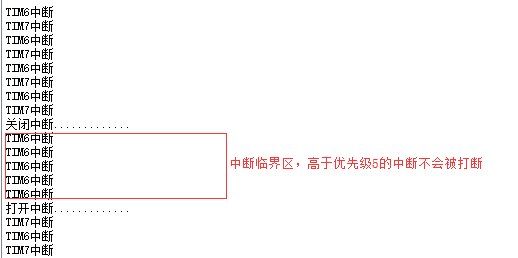
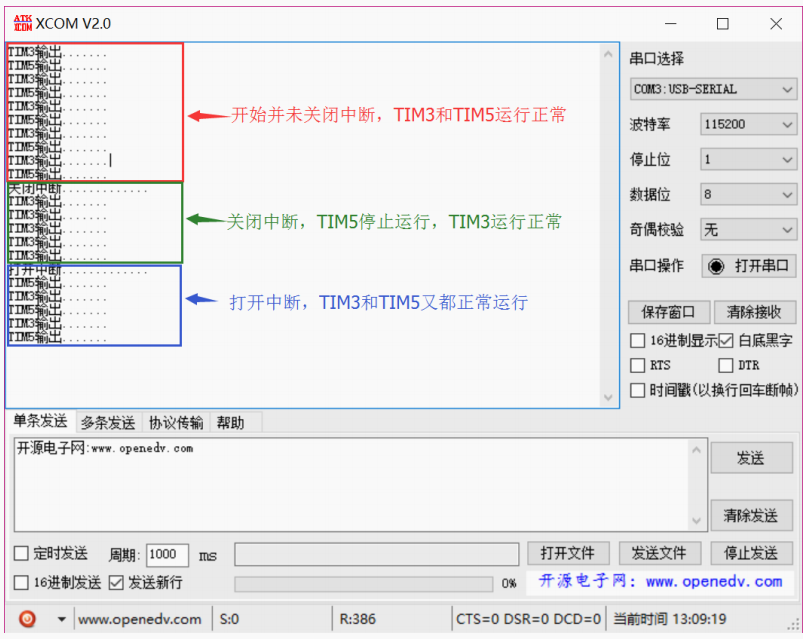
开启定时器TIM6和TIM7,两个定时器每隔一定时间串口打印一次,设置定时器TIM6中断优先级为4,定时器TIM7中断优先级为5, 高于 5 的优先级(即优先级数小于5)不归操作系统管理。
简而言之,定时器TIM6不归FreeRTOS管理,在关闭中断时,低于优先级5的都会被关闭,高于或者等于优先级5的都会被关闭。
1、创建中断测试任务
xTaskCreate((TaskFunction_t)interrupt_task,//任务函数 (const char*)"interrupt_task",//任务名称 (uint16_t)INTERRUPT_STK_SIZE,//任务堆栈大小 (void*)NULL,//传递给任务函数的参数 (UBaseType_t)INTERRUPT_TASK_PRIO,//任务优先级 (TaskHandle_t*)&INTERRUPTTask_Handler);//任务句柄
2、中断测试任务函数
void interrupt_task(void*pvParameters) { static u32 count_num=0; while(1) { count_num++; if(count_num==5) { printf("关闭中断............. "); portDISABLE_INTERRUPTS();//关闭中断 delay_xms(5000);//延时5s printf("打开中断............. "); portENABLE_INTERRUPTS();//打开中断 } vTaskDelay(1000);//延时1000个时钟节拍,就是1sconfigTICK_RATE_HZ } }
3、定时器中断服务函数
void TIM6_IRQHandler(void)
{
if(TIM_GetITStatus(TIM6,TIM_IT_Update))//是否产生中断
{
printf("TIM6中断
");
TIM_ClearITPendingBit(TIM6,TIM_IT_Update);//清除中断标志位
}
}
void TIM7_IRQHandler(void)
{
if(TIM_GetITStatus(TIM7,TIM_IT_Update))//是否产生中断
{
printf("TIM7中断
");
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除中断标志位
}
}
4、测试结果
5、注意事项
临界区、中断服务函数、开关中断中不能使用vTaskDelay()函数,此函数就是要交出CPU一段时间,如果任务一直不延时或者挂起,那么低优先级的任务会无法获得CPU。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
cpu
+关注
关注
68文章
10929浏览量
213456 -
定时器
+关注
关注
23文章
3257浏览量
115626 -
FreeRTOS
+关注
关注
12文章
484浏览量
62499 -
中断优先级
+关注
关注
0文章
22浏览量
9425
原文标题:FreeRTOS避坑指南之中断测试
文章出处:【微信号:玩点嵌入式,微信公众号:玩点嵌入式】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【freeRTOS开发笔记】记一次坑爹的freeTOS升级
【freeRTOS开发笔记】记一次坑爹的freeTOS-v9.0.0升级到freeRTOS-v10.4.4
分享一些嵌入式系统编程中内存操作相关的避坑指南
在嵌入式系统的编程中,内存操作是我们常用到的,但往往也是易错的地方,怎么避免呢,今天给大家分享一些相关的避坑指南。数据指针...
发表于 12-17 07:18
FreeRTOS实时内核使用指南-中文
FreeRTOS实时内核使用指南-中文版,Using the FreeRTOS Real Time Kernel - A Practical Guide的中文版本
发表于 07-13 15:11
•124次下载

基于STM32应用的FreeRTOS中断设置
一、FreeRTOS中断设置介绍 FreeRTOSConfig.h中定义了两个宏,分别是: configKERNEL_INTERRUPT_PRIORITY
发表于 11-29 19:46
•2135次阅读

STM32之FreeRTOS:(一) 中断配置和临界段的使用
STM32之FreeRTOS:(一) 中断配置和临界段的使用文章目录STM32之FreeRTOS:(一) 中断配置和临界段的使用前言 一、stm32的NVIC 分组配置二、
发表于 01-14 15:43
•3次下载

【6月28日|直播】遇见KeysightCare——贵重仪器安全避坑指南
现场直播时间: 2023年6月28日 下午1415 立即报名 01 直播简介 什么?!价值百万的仪器坏了?怎么就坏了呢?如果你有这样的困惑,快来参加直播,听听专家详细介绍如何“避坑”,保证高端

芯片测试大讲堂——半导体参数测试与避坑指南
芯片测试大讲堂系列 又和大家见面了 本期我们来聊聊 半导体参数测试 内容涉及半导体参数测试原理, 参数测试面临的挑战与实测避

FreeRTOS中断测试实验
FreeRTOS 中断测试实验 设定:FreeRTOS 中优先级低于 configMAX_SYSCALL_INTERRUPT_PRIORITY的中断






 工商网监
工商网监
评论