 一文详解毫米波雷达的基本原理
一文详解毫米波雷达的基本原理

1. 雷达的基本概念
无线电探测及测距(Radio Detection and Ranging), 发射电磁波并接收目标反射的回波信号,通过对比发射信号与回收信号,获取目标的位置、速度等信息。
1.1 毫米波雷达分类
雷达的分类
• 所发射电磁波的频段,决定了雷达的基本性能特点
• 超视距雷达、微波雷达、毫米波雷达、激光雷达、…
•按照用途分类:军用,气象,导航,车载
•按照波长分类:米,分米,厘米,毫米
•按照波形分类:脉冲,连续波
按照波长和用途分类
•长波雷达(米,分米),分辨率低,穿透性强
➢一般用于广播,军事预警,卫星通讯等
•短波雷达(厘米,毫米),分辨率高,穿透性差
➢一般用于测绘,短程通讯,车载应用等
按照波形分类
•脉冲雷达
➢通过脉冲发送和接收的时间差来确定目标的距离
➢不能确定目标的速度
•连续波雷达
➢发射信号在时间上是连续的
➢发射信号的频率是随着时间变化的(调频连续波)
1.2 信息的传输
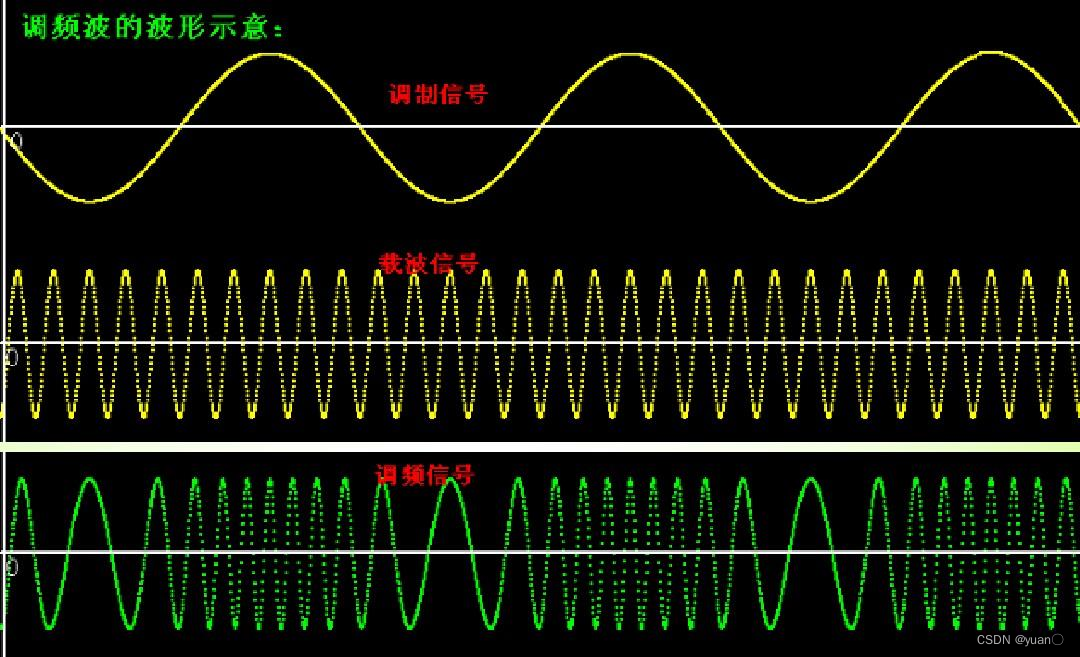
调制:将调制信号(待传输信息)混合到载波信号(起到载运作用的信号)的过程,可分为调频,调幅,调相。 解调:相反的过程,即从混合信号中恢复出待传输信息。 带宽:调制信号频谱的宽度,带宽高有利于传输更多数据。
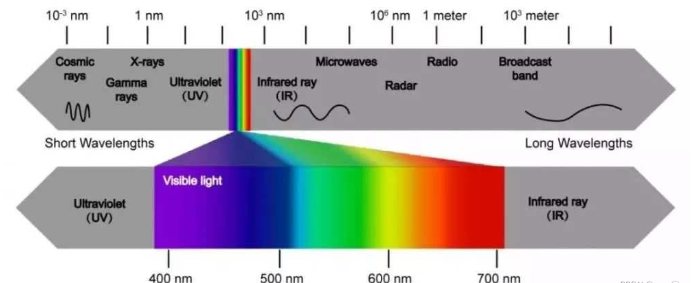
•毫米波雷达使用的电磁波波长介于1-10mm,波长短、频段宽,比较 容易实现窄波束,雷达分辨率高,不易受干扰
•早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传 感器开始应用于汽车电子、无人机、智能交通等多个领域。
1.3毫米波雷达的信号频段
1.4 毫米波雷达工作原理
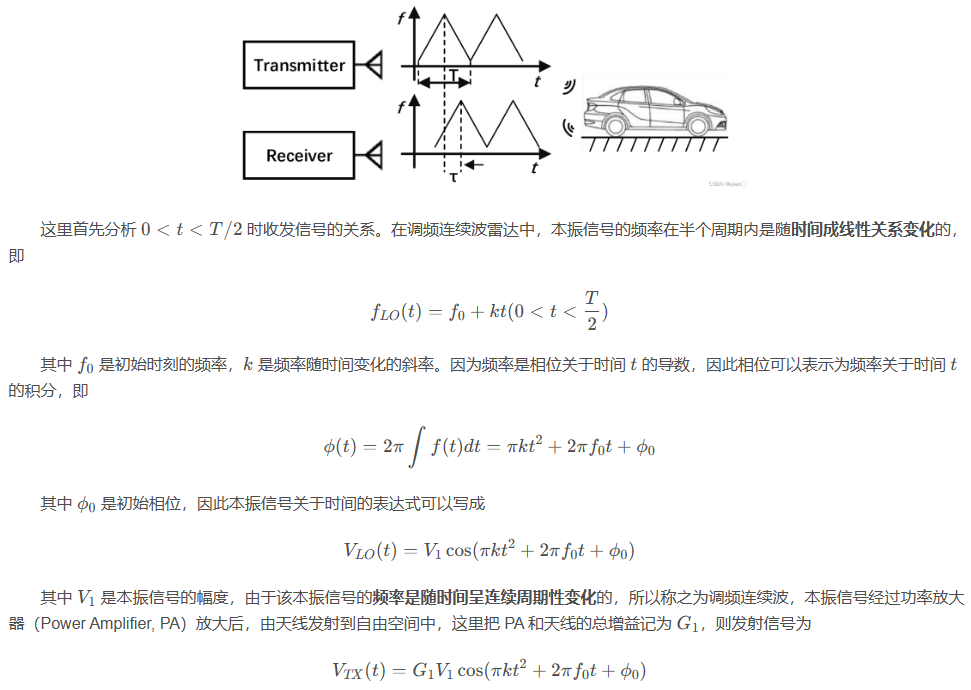
在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(FrequencyModulated Continuous Wave, FMCW),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。 主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度。 测距测速是通过分析发射和接收的调频连续之间的区别来实现。 测量角度是通过计算不同天线单元之间的延时差来计算。
1.4.1 毫米波雷达测速测距的数学原理
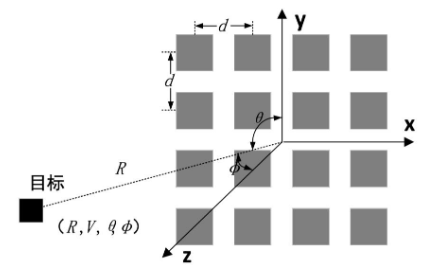
1.4.2 毫米波雷达测角度的数学原理
一对收发机所采集到的信号是不具备角度信息的, 因此需要采用多路发射多路接收的架构,或者采用相控阵架构。 短波长和小天线孔径就很有必要了,短波长意味着波束更窄,能量更加集中;更小的孔径尺寸意味着系统上能集成更多的天线单元,这些都有利于提高角分辨率。
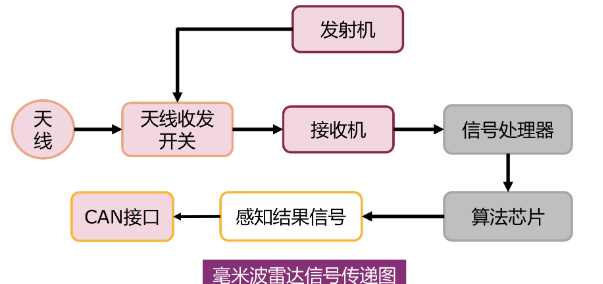
1.4.3 硬件接口
•天线向外发射毫米波,接收目标反射信号
•信号处理器完成回波信号处理
•算法芯片完成原始点云目标的进一步处理
•CAN接口完成毫米波处理数据的发送以及配置信息的输入
1.4.4 关键零部件
毫米波雷达的天线接发系统
• PCB板实现MMIC(单片微波集成电路)
• 包括接收电路单元,负责发射与接收连续调频波
毫米波雷达的信号处理芯片
• 包含信号处理器和算法芯片
• 完成回波信号处理与目标感知结果的计算
1.4.5 数据的协议与格式
传输层协议:网口UDP/IP协议,或者CAN接口
•控制器局域网总线(CAN,Controller Area Network)是一种用 于实时应用的串行通讯协议总线
数据格式:按照CAN编码机制,确定雷达的输入配置信息与输出数据格式 数据格式:按照CAN编码机制,确定雷达的输入配置信息与输出数据格式
•CAN报文
13个字节 信息段(5Byte)+数据段(8Byte) 数据段按照事先规定好的报文规则进行编码和解码
•CAN报文解析使用方法

数据内容:不同内容使用不同的CAN协议 Cluster类型:包含3类message:
•Header(数量n)
•+n个数据消息(距离/角度/速度)
•+n个质量消息(数据的方差)(1≤n ≤ 256)
1.5车载毫米波雷达的重要参数
常见参数:
•测量性能 测距范围
距离/水平角/速度 分辨率 (可对两个物体进行区分的最小单位)
距离/水平角/速度 精度 (测量不确定性)
•操作条件 雷达发射功率、传输能力、电源、功耗、操作温度
1.6 车载毫米波雷达的三种典型应用
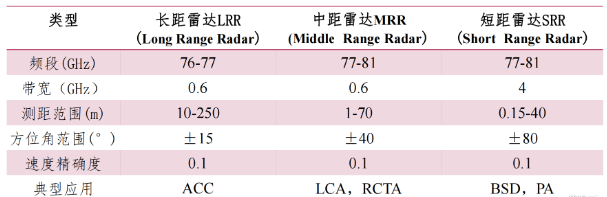
毫米波雷达具有全天侯适应性,是高级别自动驾驶实现必备的环境感知传感器。 77GHz及79GHz雷达是未来车载毫米波雷达的发展方向,国内正处于快速追赶时期。

2. FMCW雷达的工作流程
PS:此部分主要是为了简单理解FMCW雷达的工作原理,是对第一章内容的补充。
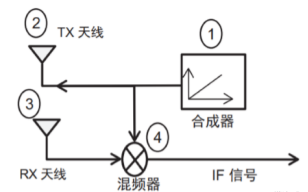
总结一下,FMCW雷达的工作流程:
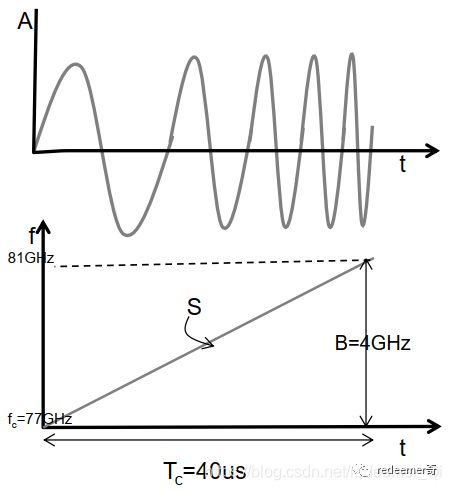
•合成器生成一个线性调频信号 ;
•发射天线( TX )发射线性调频信号;
•接收天线( RX )捕获目标对线性调频信号的反射;
•混频器将RX和TX信号合并到一-起,生成一个中频(IF )信号。
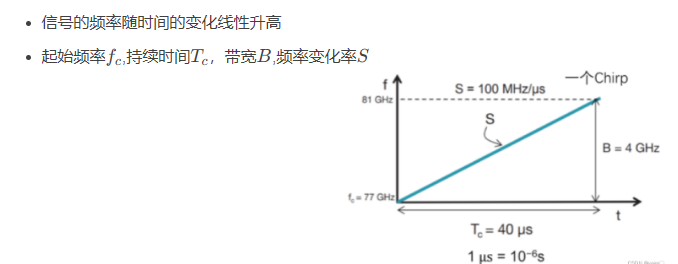
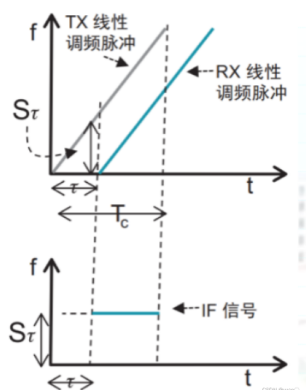
2.1 线性调频脉冲信号
对于一个脉冲信号
2.2 混频器
作用:将TX和RX的信号合并生成一个新的信号IF TX发射信号:
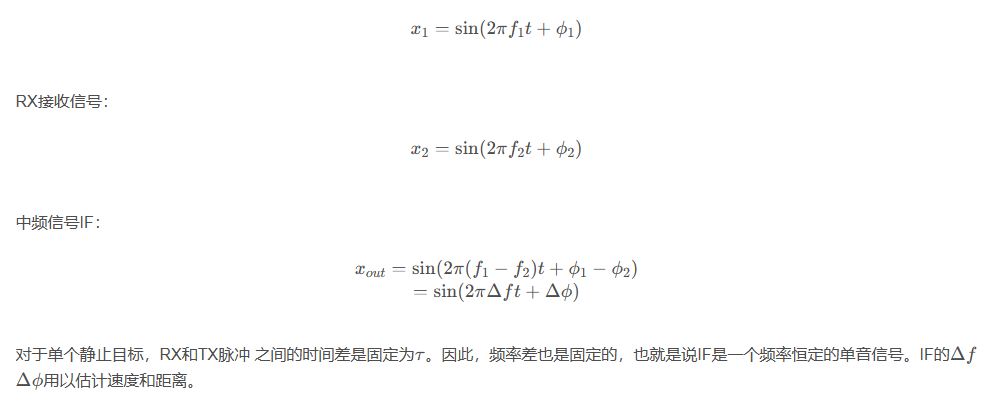
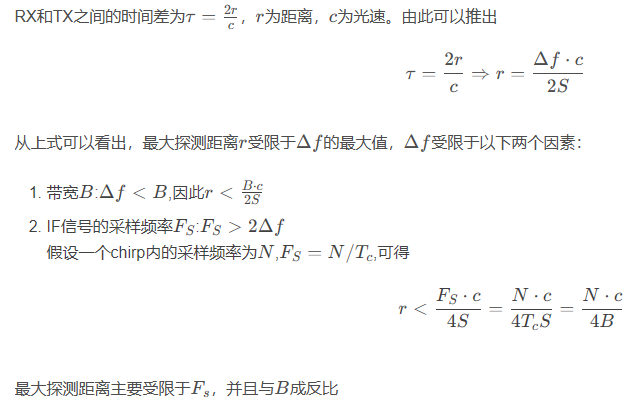
2.3单目标距离估计
PS:此处估计为了简要分析,雷达与目标的相对速度为0。
2.4多目标距离估计

图片来源
•来自三个目标的RX接收信号,每个信号有不同的延时,延时和与目标的距离成正比。
•不同的RX接收信号转化为多个单音信号,每个信号的频率差是恒定的(fb1 , fb2 , fb3 )
•混频器输出的是多个单音信号的叠加。对该信号进行FFT操作,会产生一个具有不同的峰值的频谱,每个峰值表示在特定距离处的目标。
距离分辨率是指雷达能区分两个不同目标的最小距离。傅里叶变换理论指出:观测时间窗口T,可以分辨间隔超过1 / T Hz的频率分量。 因此,两个目标反射信号频率差的差值需要满足。
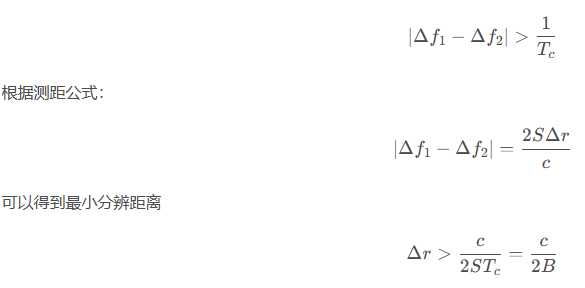
因此,从式子中我们可以得到提高分辨率的方法:提高带宽B,延长chirp信号。
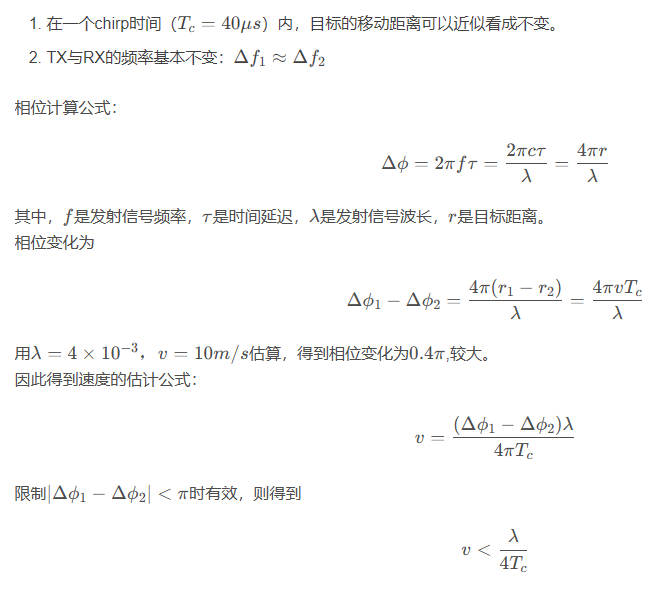
2.5 单目标速度估计
FMCW雷达会发射两个间隔Tc的线性调频脉冲(两个Chirp) ,相应的IF信号为:
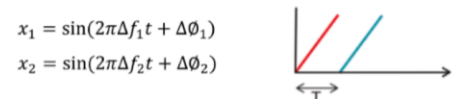
在这里有两个近似条件:

2.6多目标速度估计
发射一组M个等间隔线性调频脉冲(M个Chirp),对N这个维度进行FFT处理(距离FFT) ,得到M个频谱。

•如果目标距离相同,速度不同,M个频谱的峰值相同,但相位不同,包含来自多个目标的相位成分。
•如果目标距离不同,速度不同,M个频谱都会出现多个峰值,每个峰值的相位都不同。 对M这个维度进行FFT处理(速度FFT) ,可以分离多个相位分量。

速度分辨率:雷达能区分两个不同目标的最小速度差。
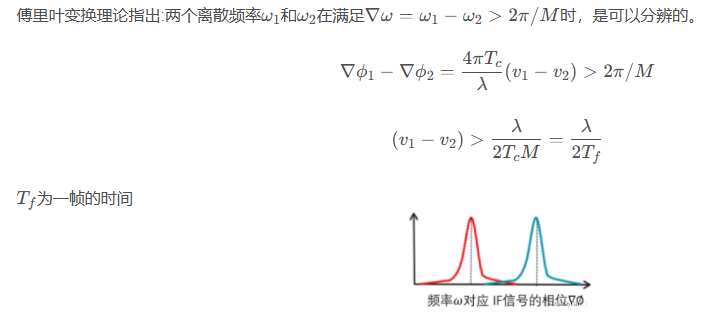
提高速度分辨率的方法:提高帧时间,Chirp时 间固定的话等价于增加Chirp个数。

审核编辑:刘清
-
接收机
+关注
关注
9文章
1248浏览量
56428 -
无线电
+关注
关注
63文章
2215浏览量
119844 -
电磁波
+关注
关注
21文章
1506浏览量
55899 -
激光雷达
+关注
关注
982文章
4553浏览量
197113 -
毫米波雷达
+关注
关注
109文章
1173浏览量
66409
原文标题:毫米波雷达基本原理深度解析
文章出处:【微信号:中科聚智,微信公众号:中科聚智】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
车载毫米波雷达的技术原理与发展
车载毫米波雷达的原理是什么?
FMCW毫米波雷达的基本原理




评论