 【开源获奖案例】四轴机械臂控制系统
【开源获奖案例】四轴机械臂控制系统
——来自迪文开发者论坛
本期为大家推送迪文开发者论坛获奖开源案例——四轴机械臂控制系统。工程师采用T5L智能屏,基于DGUS软件“旋转指示”控件实现机械臂的实时位置显示,并通过串口控制机械臂的运动过程。不同以往只展示机械臂的角度数值,该方案可以实现在屏幕上实时显示机械臂的旋转状态。除此之外,工程师还增加了机械臂自动运动功能。
UI素材展示 UI素材可根据实际的应用进行多样化的设计,工程师设计了一套富有科技感的界面。
UI开发示例 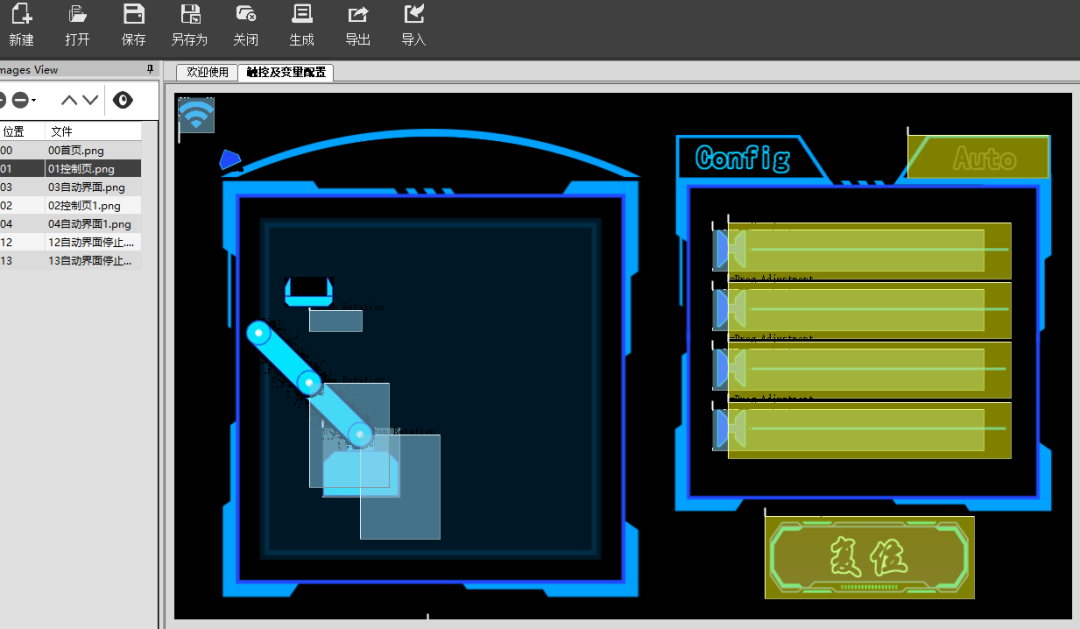 C51代码设计
C51代码设计
(1)获取机械臂当前控制的角度:
//获取机械臂状态
void get_arm_config_status(){ u8 i = 0; for(i = 0;i < 4;i++) { arm_angle_value[i] = Read_Dgus(0x1100 + i * 2); //Write_Dgus(0x1110 + i * 2, Va[i]); }}
(2)机械臂的运动过程设计:使机械臂根据设置的角度,缓慢移动到指定位置。
//设置机械臂角度
void set_arm_angle(){ int i = 0; for(i = 0;i < 4;i++)
{ if(arm_angle_value[i] != arm_angle_value_last[i])
{ if(arm_angle_value[i] < arm_angle_value_last[i])
{ arm_angle_value_last[i]--; }
else
{ arm_angle_value_last[i]++; }
Write_Dgus(0x1110 + i * 2, arm_angle_value_last[i]); if(i == 1) //第二轴运动
{ u16 armiii_pos_x = 0; u16 armiii_pos_y = 0; u16 armiv_pos_x = 0; u16 armiv_pos_y = 0; armiii_pos_x = sin((float)(225 - arm_angle_value_last[i]) * TRIGONOMETRIC) * 80 + armii_start_pos[0]; armiii_pos_y = cos((float)(225 - arm_angle_value_last[i]) * TRIGONOMETRIC) * 80 + armii_start_pos[1]; armiv_pos_x = sin((float)(180 - arm_angle_value_last[i+1]) * TRIGONOMETRIC) * 83 + armiii_pos_x; armiv_pos_y = cos((float)(180 - arm_angle_value_last[i+1]) * TRIGONOMETRIC) * 83 + armiii_pos_y; armiii_current_pos[0] = armiii_pos_x; armiii_current_pos[1] = armiii_pos_y; OneSendData4(armiii_pos_x/256); OneSendData4(armiii_pos_x%256); OneSendData4(armiii_pos_y/256); OneSendData4(armiii_pos_y%256); Write_Dgus(0x2100 + 4, armiii_pos_x); //第三轴的位置 Write_Dgus(0x2100 + 5, armiii_pos_y); Write_Dgus(0x2200 + 4, armiv_pos_x); //第三轴的位置 Write_Dgus(0x2200 + 5, armiv_pos_y); }
else if(i == 2)
{ u16 armiv_pos_x = sin((float)(180 - arm_angle_value_last[i]) * TRIGONOMETRIC) * 83 + armiii_current_pos[0]; u16 armiv_pos_y = cos((float)(180 - arm_angle_value_last[i]) * TRIGONOMETRIC) * 83 + armiii_current_pos[1]; Write_Dgus(0x2200 + 4, armiv_pos_x); //第三轴的位置 Write_Dgus(0x2200 + 5, armiv_pos_y);
} break;
} }}(3)按键设计:开发者设计了复位、添加、删除、开始、停止按键功能//获取按键状态
void get_key_status(u16 addr){ u16 Va=Read_Dgus(addr); //u16 V1=Read_Dgus(0x0f01); if(Va != 0x0000)
{ if(Va == 0x0001) //复位
{ Write_Dgus(0x1100 + 0, 0); Write_Dgus(0x1100 + 2, 0); Write_Dgus(0x1100 + 4, 0); Write_Dgus(0x1100 + 6, 90); }
else if(Va == 0x0002) //添加
{ if(arm_auto_cnt < 5) { u8 i = 0; u8 send_str[30] = {0}; for(i = 0;i < 4;i++) { arm_auto_list[arm_auto_cnt][i] = arm_angle_value[i]; } sprintf(send_str, "I:%d II:%d III:%d IV:%d", arm_auto_list[arm_auto_cnt][0], arm_auto_list[arm_auto_cnt][1], arm_auto_list[arm_auto_cnt][2], arm_auto_list[arm_auto_cnt][3]); write_dgus_vp(0x1500 + 0x20 * arm_auto_cnt, send_str, 16); arm_auto_cnt++; } }
else if(Va == 0x0003) //开始 { auto_start_flag = 1; auto_start_cnt = 0; }
else if(Va == 0x0004) //停止 { auto_start_flag = 0; Write_Dgus(0x1100 + 0, arm_angle_value_last[0]); Write_Dgus(0x1100 + 2, arm_angle_value_last[1]); Write_Dgus(0x1100 + 4, arm_angle_value_last[2]); Write_Dgus(0x1100 + 6, arm_angle_value_last[3]); }
else if(Va >= 0x0010 && Va <= 0x0014) //删除内容
{ u16 delete_select = Va - 0x0010; if(arm_auto_cnt > delete_select) //有删除的内容
{ u8 i = 0; u8 send_str[30] = {0}; for(i = delete_select;i < arm_auto_cnt - 1;i++) { memcpy(arm_auto_list[i], arm_auto_list[i + 1], 8); }
memset(arm_auto_list[i], 0, 8); for(i = delete_select;i < arm_auto_cnt - 1;i++)
{ sprintf(send_str, "I:%d II:%d III:%d IV:%d\0", arm_auto_list[i][0], arm_auto_list[i][1], arm_auto_list[i][2], arm_auto_list[i][3]); write_dgus_vp(0x1500 + 0x20 * i, send_str, 16); } memset(send_str, 0, 30); write_dgus_vp(0x1500 + 0x20 * i, send_str, 16); arm_auto_cnt--; } } Write_Dgus(addr, 0); }}(4)机械臂自动运动功能//自动运动
void auto_run(){ if(auto_start_flag == 1 && arm_auto_cnt >= 2) //动作必须两个及以上 { if(memcmp(arm_angle_value, arm_auto_list[auto_start_cnt], 8) != 0) //不等于
{ Write_Dgus(0x1100 + 0, arm_auto_list[auto_start_cnt][0]); Write_Dgus(0x1100 + 2, arm_auto_list[auto_start_cnt][1]); Write_Dgus(0x1100 + 4, arm_auto_list[auto_start_cnt][2]); Write_Dgus(0x1100 + 6, arm_auto_list[auto_start_cnt][3]); }
else if(memcmp(arm_angle_value_last, arm_auto_list[auto_start_cnt], 8) == 0) //当前运动等于目标
{ auto_start_cnt++; if(auto_start_cnt >= arm_auto_cnt)
{ auto_start_cnt = 0; } } }}
-
控制系统
+关注
关注
41文章
6595浏览量
110569 -
冗余机械臂
+关注
关注
0文章
2浏览量
1076 -
智能屏幕
+关注
关注
0文章
65浏览量
3323
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论