 AGV在立体仓库中的路径规划
AGV在立体仓库中的路径规划
AGV
近年来随着工业自动化、计算机集成制造系统技术逐步发展、以及柔性制造系统、自动化立体仓库的广泛应用,AGV作为联系和调节离散型物流管理系统,并且其作业连续化的必要自动化搬运装卸手段,其应用范围和技术水平得到了迅猛的发展。以汽车行业为例,近年很多自动化的“黑灯工厂”,依托的除了自动化的设备,背后默默运行的还有智能立库和AVG的“神联动”。智能立库和AGV的广泛应用,带动了国内生产模式的的全新变革。
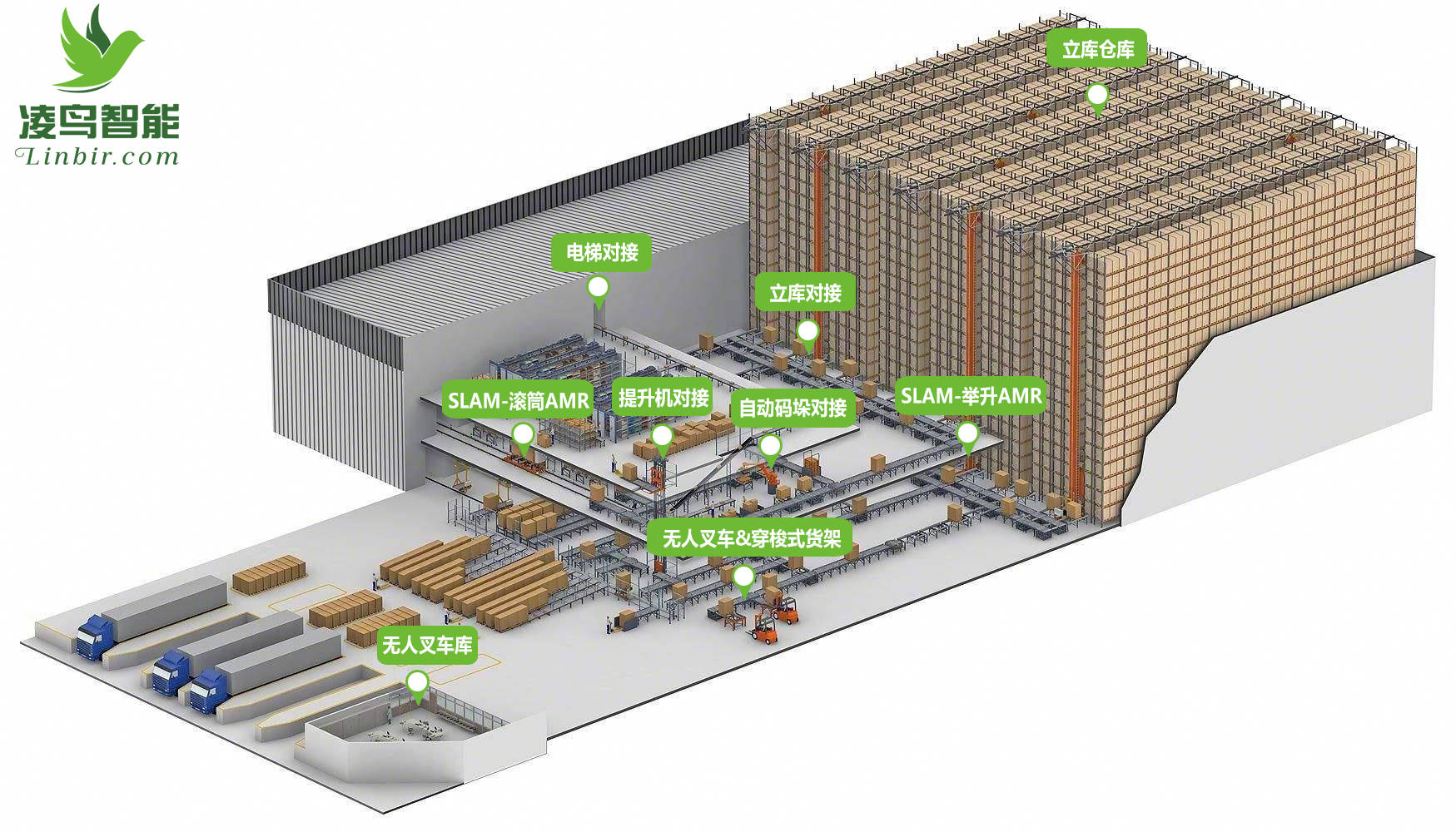
AGV智能仓储
在进行AGV路径规划时,应遵循以下基本原则:
最短路径原则:以最短的路径完成AGV的运输任务,减少运输时间和成本。
空间优化原则:在满足最短路径的前提下,尽量减少货物的搬运次数和搬运距离,提高空间利用率。
调度灵活性原则:路径规划应考虑AGV调度过程中的灵活性,以便应对突发情况或调整任务顺序。
安全性原则:确保AGV在行驶过程中的人身和财产安全,避免因路径规划不合理导致的安全事故。
随着人工智能技术的不断发展,利用人工智能算法进行路径规划成为一种趋势。其中,最为常见的是利用遗传算法、蚁群算法、粒子群算法等优化算法进行路径规划。通过构建数学模型,将AGV的路径规划问题转化为一个求解最优解的问题,进而得到最优路径方案。此外,深度学习算法也是一种有效的路径规划方法,可以利用神经网络自学习和自适应的特性,对大量数据进行处理和分析,以得到更加精确和优化的路径方案。
在实际的立体仓库中,AGV的路径规划往往受到多种因素的制约,如时间、成本、空间布局等。因此,需要综合考虑多约束条件进行路径规划。其中,一种有效的方法是采用多目标优化算法,将多个约束条件转化为一个目标函数,进而通过求解目标函数的最小值或最大值得到最优路径方案。此外,还可以采用启发式算法,根据问题的特性设计相应的启发式规则,以得到更好的路径规划效果。

AGV无人叉车
在实际的立体仓库中,由于环境和实际情况的复杂性,很难通过理论方法得到最优的路径方案。因此,可以通过模拟仿真方法进行路径规划。其中,可以利用计算机仿真技术建立立体仓库的仿真模型,并通过模拟运行不同的路径方案得到最优解。此外,还可以利用仿真软件对不同的算法进行仿真分析,以比较不同算法的效果和优劣性。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28525浏览量
207573 -
AGV
+关注
关注
27文章
1318浏览量
41148
发布评论请先 登录
相关推荐
宁德时代智慧仓库项目于2024年底开通

AGV小车在制造业中的应用有哪些?
AGV小车的工作原理是什么?
agv搬运机器人是怎么实现无人搬运的?

RFID手持终端在仓库管理中的应用

无线光通信在AGV上的应用
Agv小车能对接哪些自动化设备?最后一个你绝对想不到
凤凰动力AGV舵轮大揭秘!
AGV的四点关键技术,你都了解吗?

AGV系统设计解析:布局-车体-对接-数量计算-路径规划

解析无人叉车在自动化立体库的4大应用 看过最后一个 算我输

更智能更柔性化,AGV导航方式的创新与演进!

行业首个、规模最大的晶科能源智能立体仓库在海宁基地正式投产
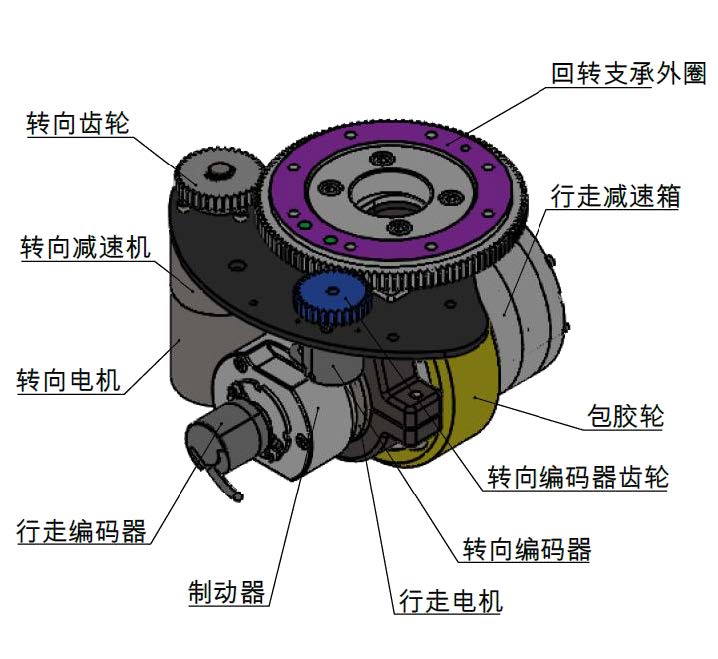
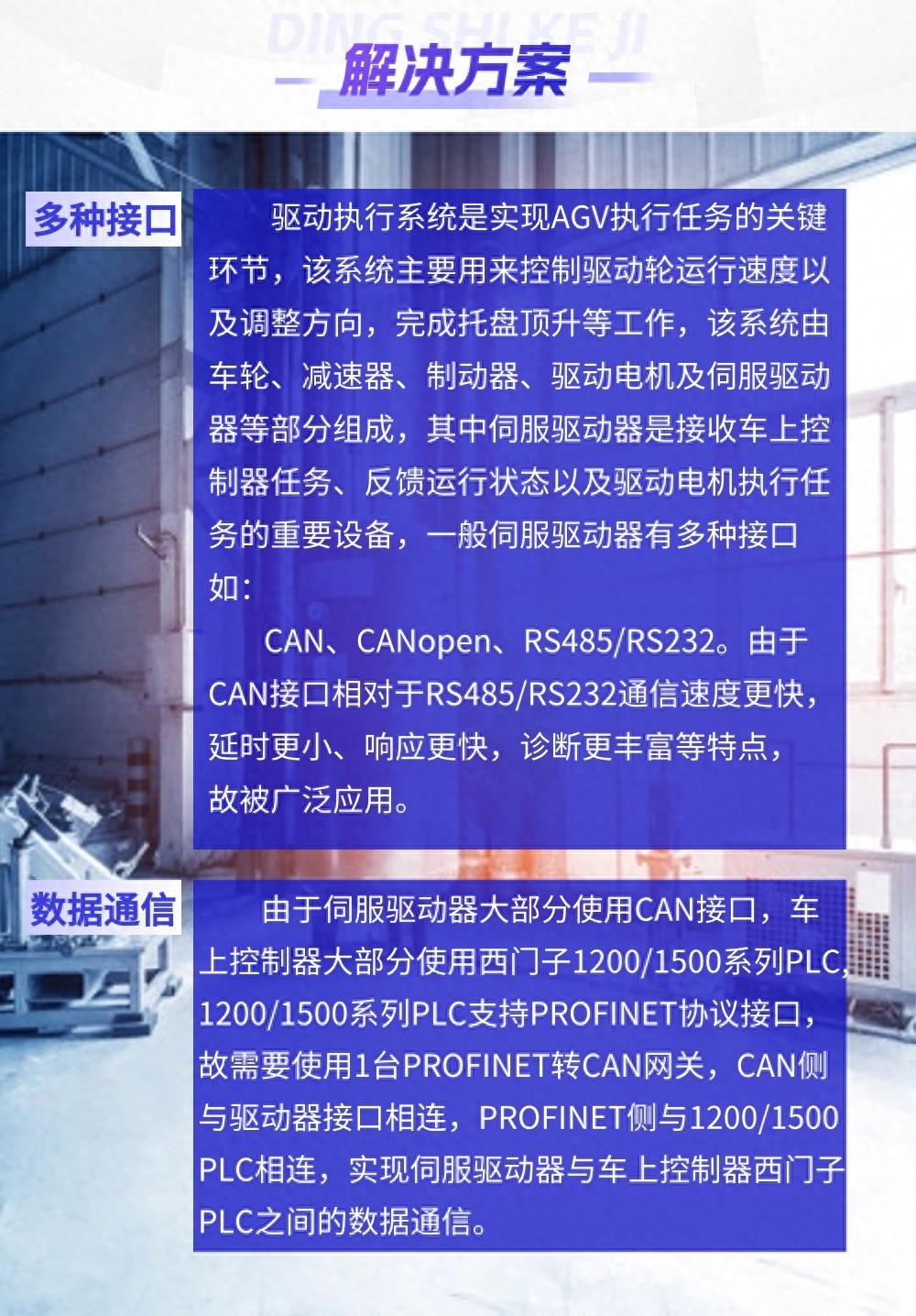
CAN转PROFINET新应用,节能降本又高效,AGV行业西门子PLC与CAN驱动系统连接通信解决方案





 工商网监
工商网监
评论