 自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案
自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案
佐思汽研发布《2024年自动驾驶地图行业研究报告》。
随着高精度地图资质监管收紧,地图采集成本、更新频率、覆盖范围等问题凸显,以及城市NOA的快速发展,2023年“轻地图”的智驾方案成为热门话题,该方案降低了对离线高精度地图的依赖,高精度地图的发展遇到挑战。 从自动驾驶的发展进程看,一段时间内将持续处于人机共驾阶段,这个阶段对地图的需求并不一定是要高精度地图,针对不同地图互补特性整合的多源地图可能更适合该阶段的自动驾驶需求。
新一代自动驾驶地图发展情况下,各方如何应对?
政府:收紧高精度地图测绘甲级资质的同时,积极推进高辅地图(高级辅助驾驶地图)的审图、乙级测绘资质等审查工作。
2023年6月国家自然资源部地图技术审查中心公布了全国城市普通道路高级辅助驾驶地图审图工作的阶段性进展,允许企业批量送审全国城市普通道路高级辅助驾驶地图。目前,四维图新过审全国城市高辅地图数据覆盖30个省份120个城市;百度地图过审134座城市的高级辅助驾驶地图。
主流图商高辅地图许可情况
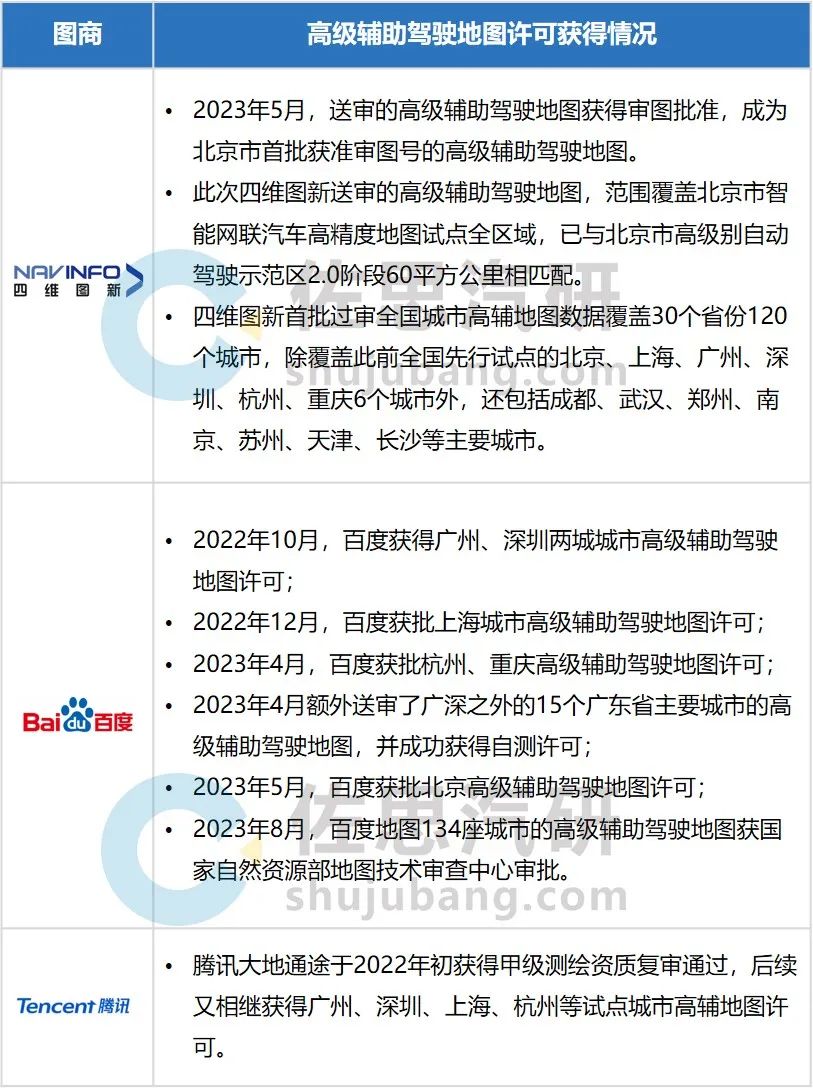
来源:佐思汽研《2024年自动驾驶地图行业研究报告》
主机厂:相关部门对导航电子地图测绘甲级资质的收紧,打击了主机厂布局地图测绘甲级资质的积极性。目前一部分主机厂通过神经网络大模型算法等实现实时建图,削弱对离线高精度地图的依赖,以特斯拉、理想、小鹏、华为ADS加持车型为代表;另一些主机厂则寻求稳健,通过申请乙级测绘资质或与图商合资成立新公司等形式来获取测绘资质,如广汽与南京市测绘勘察研究院股份有限公司等合作方共同投资设立“广东广祺舆图股权投资合伙企业(有限合伙)、蔚来下属公司安徽蔚来智行科技有限公司申请互联网地图服务甲级资质等。
图商:顺应市场需求推出“轻地图”方案,将SD数据、HD数据、LD数据等放到一张图上,保证导航的连贯性。此外以腾讯为例,在推出“三合一”智驾地图之后又进一步推出“智驾云图”, 支持图商、车企、自动驾驶公司等角色协同共建。
新势力车厂率先开启“轻地图”方案
目前主机厂不依赖高精度地图的方案,不是真正意义上的完全不用地图,而是对高精度地图的地图元素做减法或者在导航地图上做加法。
在“轻地图”方案上布局比较积极的主要是新势力车厂,原因之一是新势力车厂城市NOA功能推进速度较快,而高精度地图无法匹配相关需求。
部分主机厂的“轻地图”方案
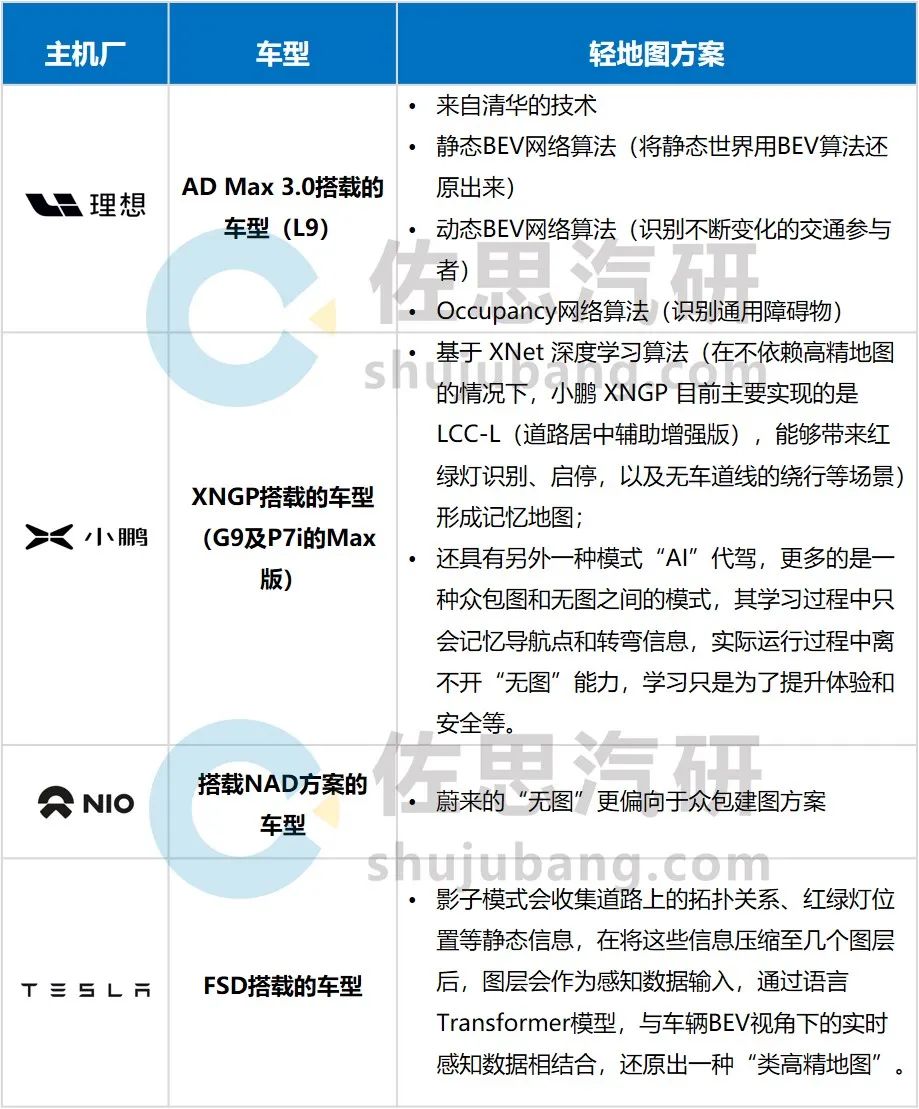
来源:佐思汽研《2024年自动驾驶地图行业研究报告》
小鹏
2023年上半年开始基于SD地图研发智驾方案,使用高精度地图的NGP和不使用高精度地图的NGP采用的是同一套技术栈,区别仅仅是把原先高精地图的输入,换成了导航地图的输入和实时感知对导航信息的理解。
小鹏不使用高精度地图的方案相比使用高精度地图的方案具有泛化速度快4~10倍,彻底解决数据鲜度,降低成本、普及智驾等优势。
小鹏实现的“无离线高精度地图”就是依靠XNet来实时构建“高精地图”。
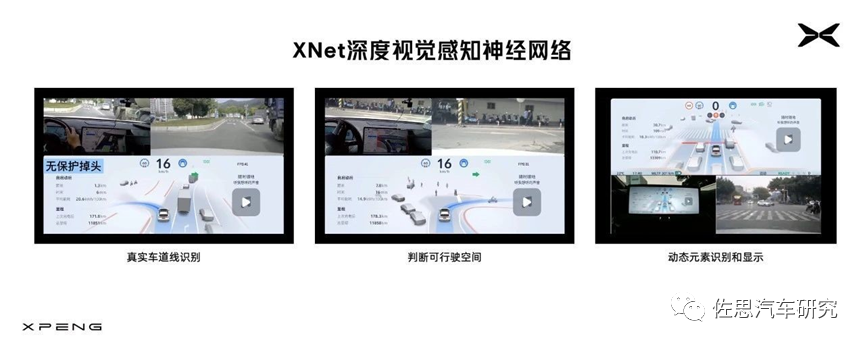
来源:小鹏
理想
理想在2023年开启城市NOA,该方案不依赖高精度地图,主要是构建路口的特征用于协助实时感知建图,概括来说就是路段“无图”,路口采用众包建图。
目前,理想在推进NPN方案,希望解决地图的在线更新问题。
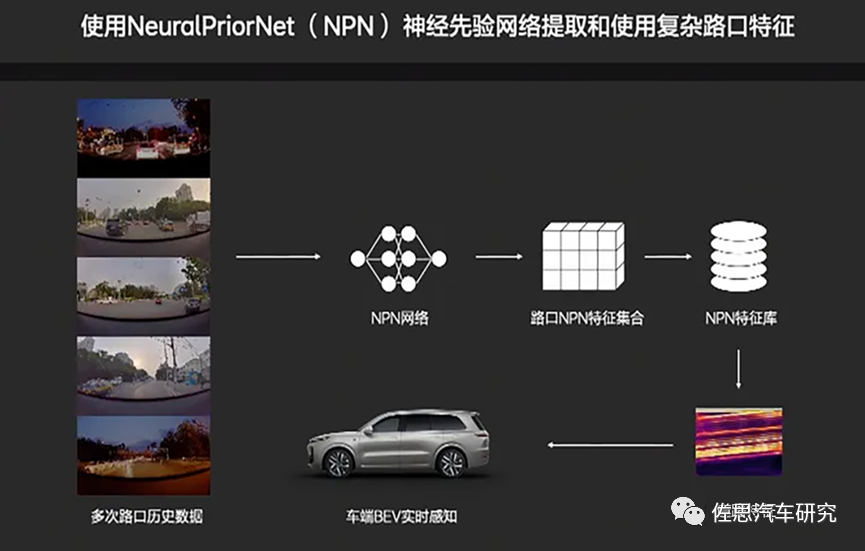
来源:理想
从主机厂的方案看,“轻地图”方案虽然对高精度地图的依赖度降低,但对车端感知和算法的要求变得更高。
传统图商顺应需求推出轻量化自动驾驶地图解决方案
主机厂“不依赖高精度地图”的呼声越来越高,传统图商也在顺应市场需求,做出改变,积极改善高精度地图的三大痛点:更新频率、覆盖面积、成本,推出更符合现阶段自动驾驶需求的地图产品。
主流图商智驾地图布局

来源:佐思汽研《2024年自动驾驶地图行业研究报告》
百度
2023年7月,推出人机共驾地图Baidu MapAuto 6.5,是全3D车道级地图、是全场景人机共驾地图,可以提供SD、LD和HD三种数据。其中,SD数据已覆盖全国,当前已在1000万车辆上搭载。LD百度轻地图数据服务由车道级拓扑、复杂场景几何、经验图层、动态信息图层组成,实现了天级更新。
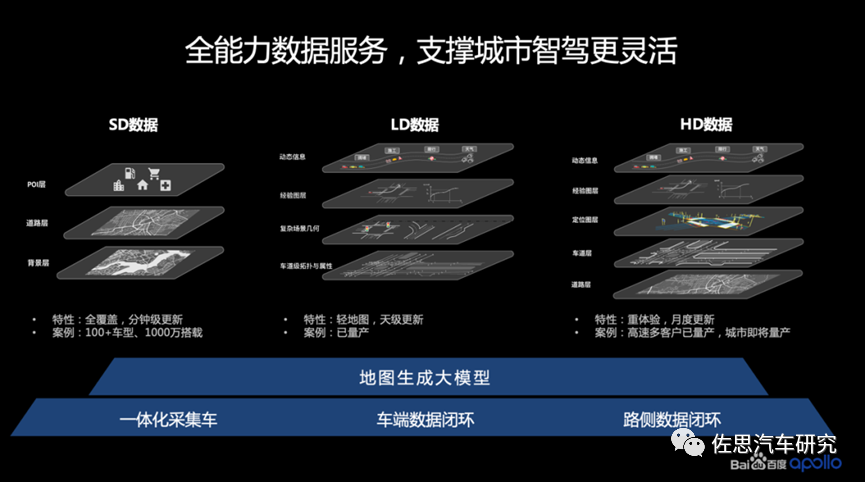
来源:百度
高德
2023年6月推出全新的HQ Live MAP,融合了HD MAP和SD MAP的优点。HQ Live MAP虽在精度方面无法达到HD MAP(绝对精度50cm,相对精度10cm)的细致程度,但对于高级辅助驾驶的场景来说也已足够(高速和城市快速路场景:绝对精度1m,相对精度30cm;城区普通路场景:相对精度1m),同时还简化了城区普通路场景中不必要的地图元素,进一步降低了制作和部署成本。
腾讯
2023年9月发布最新的智驾云图,实现自动驾驶地图的全面云化,支持要素级、分钟级在线更新,并且支持图商、车企、自动驾驶公司等角色协同共建。
腾讯智驾云图拥有可扩展的多图层形态,包含基础地图图层、更新要素图层、ODD动态图层、驾驶经验图层、运营图层等,车企可根据自身需求灵活配置并管理图层,并通过与车企自身数据图层结合,搭建适合自身的数据驱动运营平台。

来源:腾讯
佐思汽研《2024年自动驾驶地图行业研究报告》主要研究内容如下:
自动驾驶地图相关政策、法规、标准等制定情况研究;
城市NOA发展下车载地图的发展方向、传统图商应对策略,城市NOA用的主要地图种类等情况研究;
高精度地图市场现状、市场规模、企业格局、商业模式、发展难点等情况研究;
智驾地图不同的应用场景,包括乘用车高速自动驾驶、低速泊车、无人驾驶载人、无人驾驶载物等情况研究;
国内外主要图商的地图产品系列、新产品布局、产品应用合作等情况研究;
高精度地图相关技术支持公司主要技术布局、新技术研发等情况研究。
-
算法
+关注
关注
23文章
4615浏览量
92999 -
自动驾驶
+关注
关注
784文章
13839浏览量
166550 -
大模型
+关注
关注
2文章
2476浏览量
2814
原文标题:自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
2024城市NOA产研报告发布:谁才是第三方智驾供应商之首
城市NOA是评价智驾能力的唯一标准吗?
自动驾驶无图方案真的可行吗?
实现自动驾驶,唯有端到端?

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
抛弃高精度地图旧模式,走向视觉感知新时代?
自动驾驶仿真测试实践:高精地图仿真

小米城市NOA首秀,被雷军认可的轻地图到底是什么?

亮道智能携海侧向激光雷达城市NOA方案亮相2024北京车展
百度开放车道级地图数据,助力高级驾驶与无人驾驶

未来已来,多传感器融合感知是自动驾驶破局的关键
四维图新专家携轻量化地图解决方案参与城市NOA发展趋势分享






 工商网监
工商网监
评论