 偏振成像激光雷达与短波红外复合光学接收系统设计与分析介绍
偏振成像激光雷达与短波红外复合光学接收系统设计与分析介绍

**0. 引言**
三维成像激光雷达因具备主动照明、角度分辨率高、可探测距离信息等优势,被视为是被动遥感和微波雷达后的下一代技术产品,与传统被动传感器成像及微波雷达相比,三维成像激光雷达具有明显优势,同时还具备抗干扰能力强、易于小型化等特点。非扫描式三维成像激光雷达是目前研究的热点方向之一,其中基于偏振调制的非扫描型三维成像激光雷达(后文称偏振成像激光雷达)具有测量范围远、测量精度较高、成像速度快、无运动伪像等优点,同时不受其他调制方式中增强型 CCD(ICCD)、雪崩二极管(APD)阵列探测器工艺复杂、易饱和损坏等缺点限制;但其也存在需要双相机、成像视场角受电光晶体限制、成像质量易受到入射角度及云雾等大气条件的影响等缺点。
针对上述问题,本文提出采用偏振成像激光雷达与短波红外变焦光学系统共孔径复合的方式,构建双模目标探测成像系统,这样既减小两套系统的体积、解决两套系统共轴的问题,又可以解决偏振调制成像激光雷达视场角小、成像质量受到入射角度及云雾等大气条件影响以及短波红外成像目标能量较低的限制。依照上述思路,开展偏振成像激光雷达与短波红外复合光学系统设计研究,采用CodeV 软件完成系统光学设计,并对完成系统像质分析;采用 Lighttools 软件对光学系统成像过程、偏振成像激光雷达偏振调制成像过程仿真。结果表明所设计光学系统成像质量良好、设计正确可行。
1.系统原理
偏振成像激光雷达与短波红外复合光学系统,其成像原理如图 1 所示。整套系统由望远镜组、短波红外成像镜组、偏振调制镜组、分光器件以及探测器等组成,其中望远镜组实现光线接收,短波红外成像镜组为变焦镜头、实现目标探测识别,偏振调制镜组通过偏振调制实现目标测距,分光器件实现光束分光。短波红外成像镜组与偏振调制镜组通过共孔径结构方式复合,望远镜组为系统共孔径部分;望远镜与后端的短波红外成像镜组、偏振调制镜组分别构成完整折反光学系统,这样设计使系统具备宽谱段和大口径的特点。而共孔径结构存在的视场遮拦问题通过离轴三反结构型式来克服。
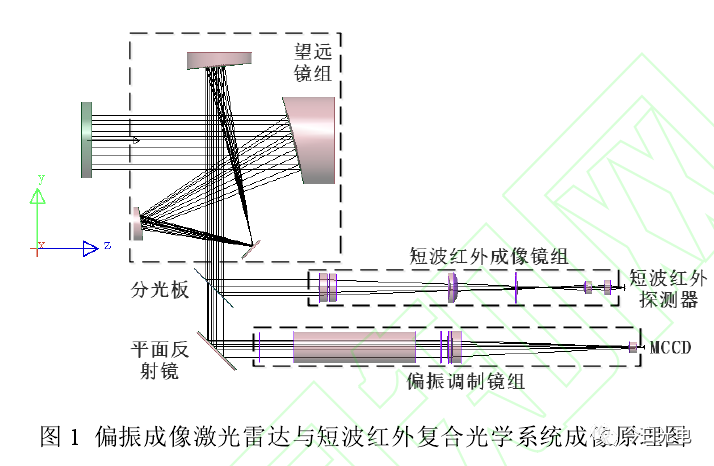
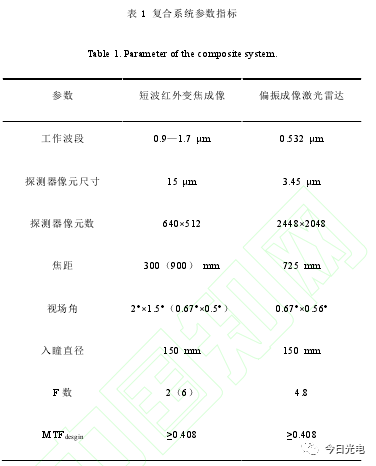
偏振成像激光测距为本系统的核心功能,其调制过程中主要使用的器件为普克尔盒,而现有普克尔盒有效利用入射光线角度最大为 1°,这使得偏振成像激光雷达视场角受限。短波红外变焦成像系统通过移动变焦实现长短焦两种模式切换,其中短焦模式具备较大视场,用于任务目标探测;变焦到长焦模式后具备较高分辨率,在短焦模式发现目标后用于目标识别;偏振成像激光雷达视场范围与短波红外系统长焦模式保持一致,在目标识别的同时完成目标测量,这样系统就完成目标探测、目标识别和目标测量的过程。以距系统 15 km 地面物体为目标,结合系统功能计算指标参数如表 1。
2. 系统光学设计结果
系统中望远镜组采用离轴三反结构型式克服视场中心遮拦问题,短波红外镜组采用移动变倍补偿组的方法来实现变焦,短波红外探测器选择 Sofradir 公司所生产的 SNAKE SW 型 InGaAs 探测器。偏振调制镜组中普克尔盒选择 FastPulse Technology 公司的 1144-50 型、分焦平面偏振相机(MCCD)选择 LUCID vision LABS 公司的 Phoenix PHX050S-P 型偏振相机。
2.1 望远镜组设计结果
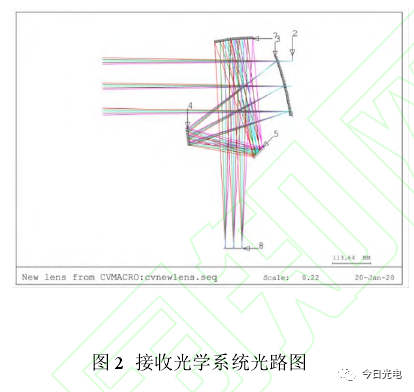
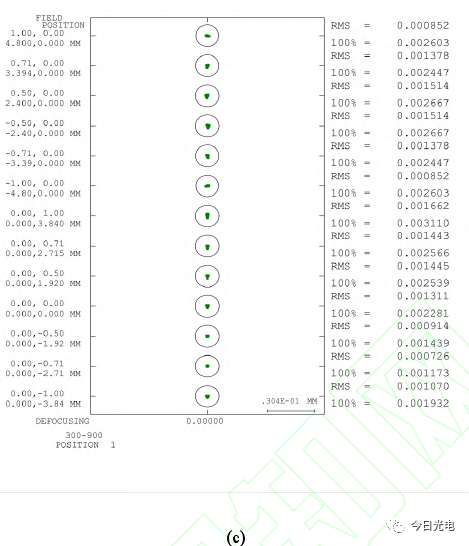
采用离孔径的方式实现离轴,便于设计完成后的加工制造以及检测装调;孔径光阑设置在主镜上,便于整体光学设计;在次镜和三镜之间的中间像面处设置一面平面反射镜来折叠光路,以减小系统的体积;同时平面反射镜设置成为视场光阑,这样可以起到有效减少系统杂散光的效果。其光路图如图 2 所示,主镜3、次镜 4、三镜 7 面型均采用二次曲面,系统入瞳直径为 150 mm,出曈直径为50 mm,缩束比为 3 倍。
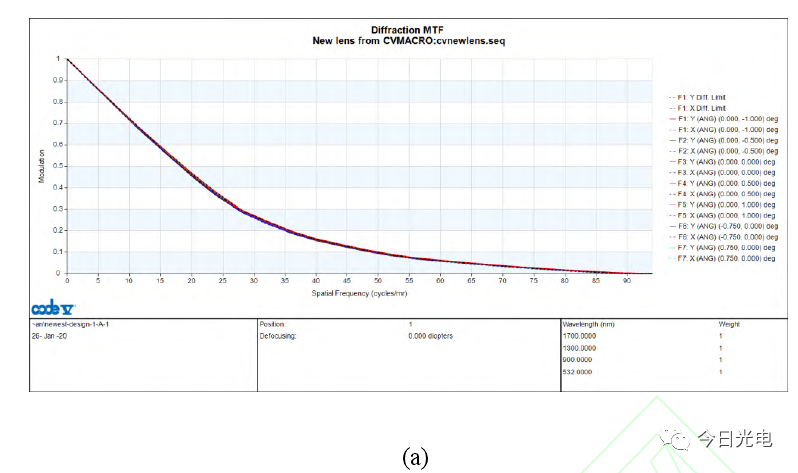
对其进行像质评价,结果如图 3 所示,工作波段的 MTF 已经接近衍射极限,各个视场所成像斑均在艾里斑内部,光斑 RMS(均方根)直径均小于 5 μm。分析结果表明望远镜组成像质量良好,光学设计满足系统要求。

2.2 短波红外成像镜组设计结果
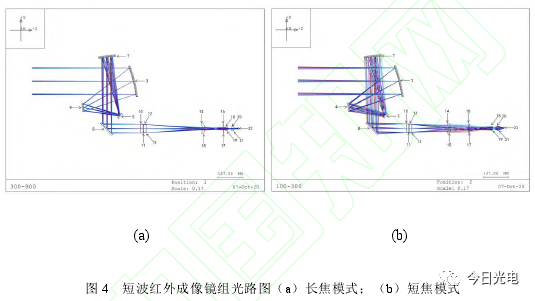
短波红外成像镜组与望远镜组合置后光路图如图 4 所示,短波红外成像镜组由前固定组(10-13 面)、变倍补偿组(14-17 面)、后固定组(18-21 面)三部分 6 片镜片组成。使用直线电机带动变焦补偿组前后移动来实现系统光学变焦,系统总长固定为 551.8454 mm,镜片材料分别选择 ZNSE 和 IRG26 两种材料,其中 IRG26 为红外硫系玻璃。
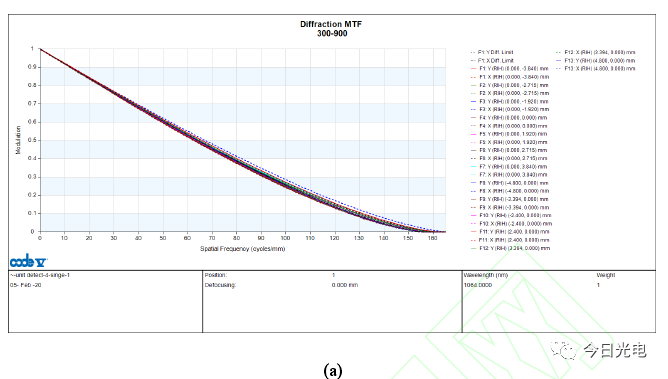
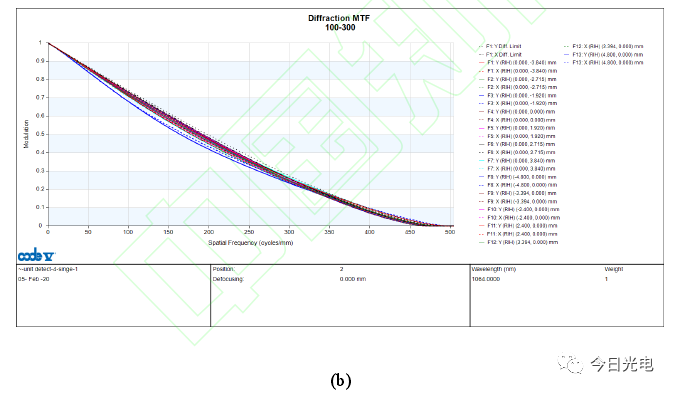
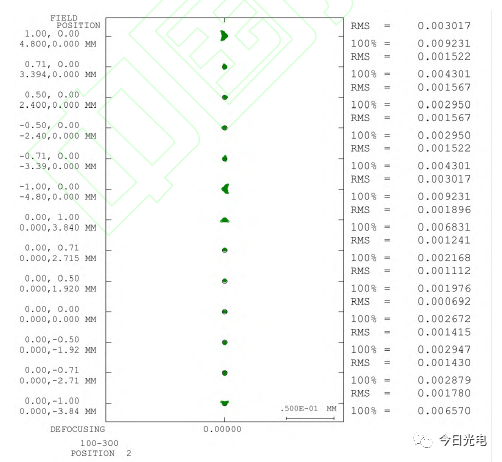
对其进行像质评价,结果如图 5 所示,两种焦距光学系统 MTF 曲线均接近衍射极限,系统视场光斑 RMS 直径大小均在 3.2 μm 及 9.3 μm 以下,均小于探测器15 μm 像元大小。分析系统斯特列尔比可知,长焦模式系统斯特列尔比最小值为0.985,最大值为 0.997,都接近于 1;短焦模式系统斯特列尔比最小值为 0.850,最大值为 0.990,只有子午方向边缘光线斯特列尔比略小,其他也接近于 1。分析结果表明短波红外成像镜组成像质量良好,光学设计满足系统要求。
2.3 偏振调制镜组设计结果
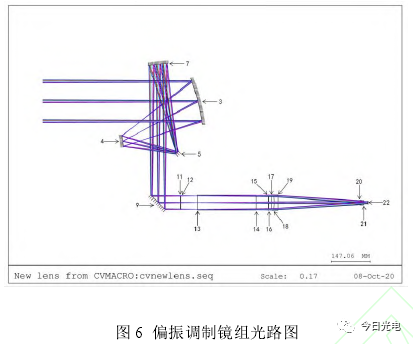
偏振调制镜组由偏振片(P)、普克尔斯盒(PC)、四分之一波片(QWP)、成像镜组(L)、MCCD 相机组成,MCCD 可分别在 0°,45°,90°,135°四个偏振方向成像,通过这四个偏振方向光强相互计算得出PC所引入相位延迟,进而间接算出光束飞行时间,实现并行激光测距。P,PC,QWP 使用 BK7 平板玻璃表示,L 使用成都光明生产的 HLAK1 和 HZF6 两种玻璃材料,光阑设置在 PC 第 1 面上,与望远镜组合置后光路图如图 6 所示。同样使用前述的 MTF、点列图等方法对其像质分析可知,各视场 MTF 均接近衍射极限,光斑均在艾里斑内、RMS 半径大小均在 0.002 mm 以下,均小于探测器 3.45 μm 像元大小。同样光学设计满足系统要求。
3. 结果分析
3.1 公差分析
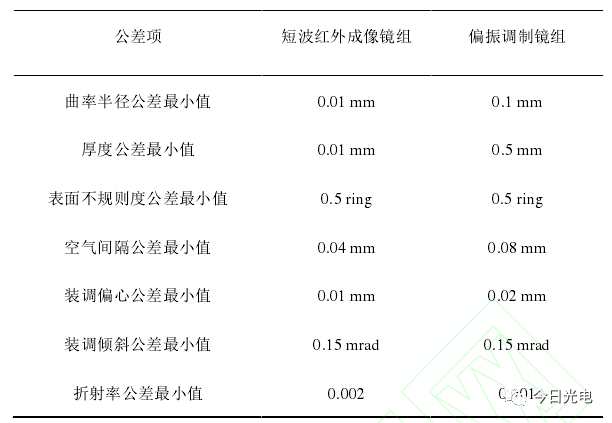
对 2.2 节和 2.3 节中所设计光学系统(已经与 2.1 节所设计望远镜组合置成一套系统,共孔径部分公差分配值保持一致)进行公差分析,将望远镜的主镜表面 α 倾斜与成像像面位置作为补偿器,主镜补偿范围为±0.002 rad,成像像面补偿范围为±0.5 mm,使用复色 MTF 公差标准反向灵敏度计算,分别在空间频率33 和 50 lp/mm 处所有视场及所有变焦范围内进行分析。经过反复调整分析,系统参数公差值部分如表 2 所示,由公差结果可得,大部分公差在工业级范围内,只有少数公差在精确级公差范围内,说明系统整体属于较易加工装调的范围。

3.2 成像仿真分析
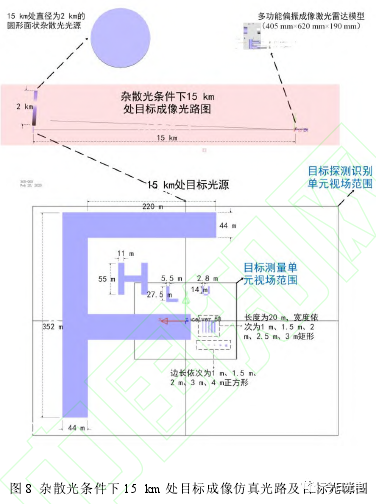
如图 7 所示,根据前面光学设计结果,使用 Lighttools 软件建立系统仿真模型,其中偏振器件 P,PC,QWP 按调制原理分别设置为线性起偏器、旋转 45°线性延迟片、旋转 0°线性延迟片。如图 8 所示,在距模型进光口 15 km 的系统视场范围内设置待测光源,以仿真不同形状目标物体在系统中成像过程,在视场范围外设置有杂散光光源,以仿真视场范围外杂散光。
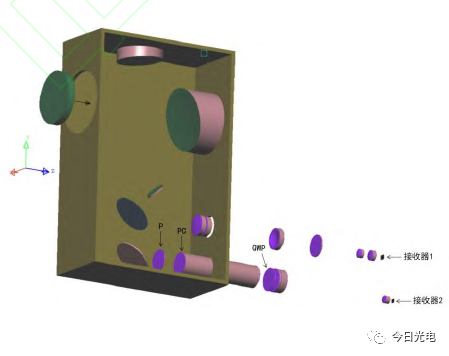
图 7 系统 Lighttools 仿真模型图
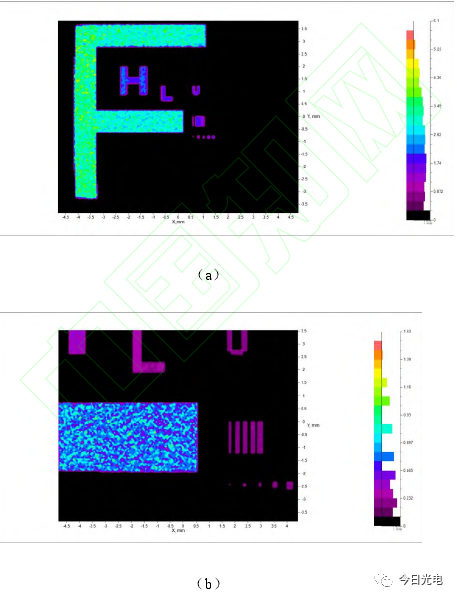
通过对 10^7条光线追迹,相对光线功率阈值设置为 10^-12,在杂散光条件下,正向模拟完成系统成像仿真过程,成像结果如图 9 所示。由分析可知,视场范围内,杂散光较少,可以忽略;短波红外短焦模式时,目标探测识别单元边缘视场存在少量畸变,畸变量小于 5%,目标边缘成像清晰;能分辨直径 1 m 的独立正方形目标,当形状相似的目标之间距离小于 3.25 m 时,系统无法完全区分。短波红外长焦模式时,视场范围内成像畸变较小,目标边缘成像清晰,能分辨直径1 m 的独立正方形目标,当形状相似的目标之间距离为 2.25 m 时,系统依然可以进行区分,而偏振成像激光雷达与短波红外长焦模式成像视场范围、成像质量与目标探测识别单元长焦成像基本一致。整体来说,系统成像质量较好。
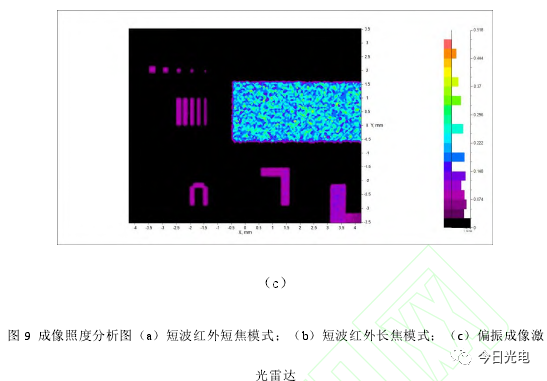
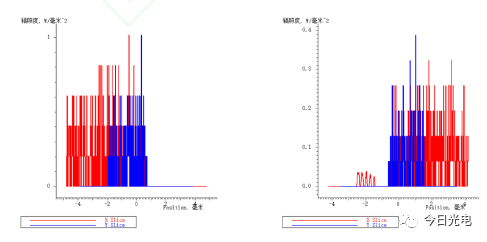
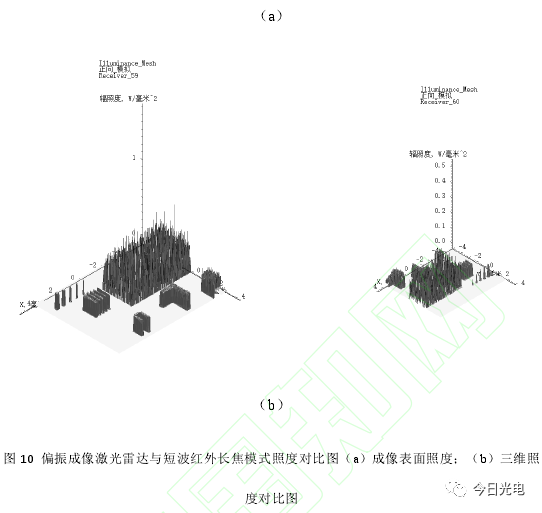
将偏振成像激光雷达与短波红外长焦模式成像结果比较,如图 10 所示,偏振成像激光雷达接收照度值约为短波红外长焦模式下的 2.4 倍,且偏振成像激光雷达整体能量分布更加均衡。
4. 总结
本文针对基于偏振调制的非扫描型三维成像激光雷达存在需要双相机、成像视场角受电光晶体限制、成像质量易受到入射角度及云雾等大气条件的影响等缺点,提出采用偏振成像激光雷达与短波红外变焦光学系统通过共孔径的方式,来复合构建双模目标探测成像系统。采用 CodeV 软件完成望远镜组、短波红外成像镜组、偏振调制镜组及系统整体光学设计,并对完成系统像质分析,可知所设计光学系统成像质量良好,光学设计满足系统设计要求。使用 Lighttools 软件对光学系统成像过程进行仿真,由结果可知偏振成像激光雷达及短波红外成像质量均较好,杂散光对系统成像影响很小,目标边缘成像清晰,均能分辨直径 1 m 的独立正方形目标;短波红外短焦模式视场范围为其长焦模式的 9 倍;短波红外长焦模式与偏振成像激光雷达视场范围基本一致;偏振成像激光雷达接收照度值约为短波红外长焦模式下的 2.4 倍,且偏振成像激光雷达整体能量分布更加均衡,成像效果更佳。
审核编辑:刘清
-
CCD
+关注
关注
32文章
907浏览量
149932 -
探测器
+关注
关注
15文章
2779浏览量
76105 -
雪崩二极管
+关注
关注
2文章
55浏览量
13354 -
RMS
+关注
关注
2文章
158浏览量
37905 -
激光雷达
+关注
关注
983文章
4595浏览量
197381
发布评论请先 登录



评论