 【开源获奖案例】智能培养室
【开源获奖案例】智能培养室
——来自迪文开发者论坛
本期为大家推送迪文开发者论坛获奖开源案例——智能培养室。工程师通过Modbus协议实现了T5L智能屏控制加热、风机控温功能,还可调节电源功率实现模拟光照功能。系统可根据屏幕上设定的参数自动运行,并保存故障历史记录。
UI素材展示 

UI开发示例 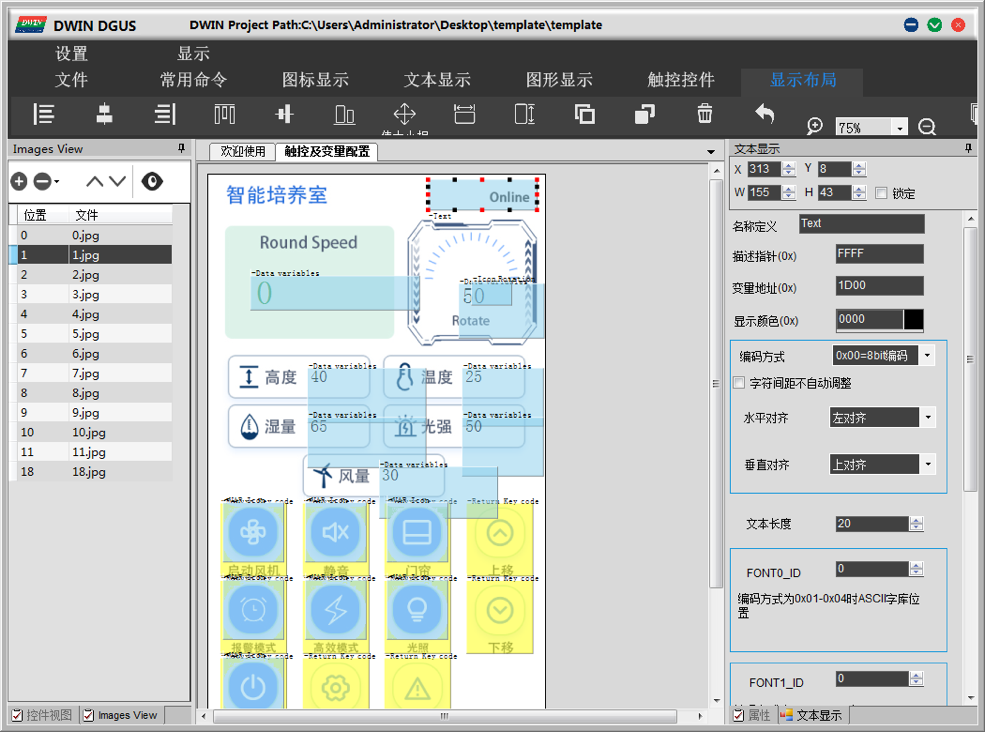 C51代码设计
C51代码设计
(1)主界面温度、湿度、高度等数据获取和更新,以及使用modbus rtu控制控温模块、电机、报警检测等各个从机的主要代码如下:
主界面代码参考:
#include "main_win.h"#include "modbus.h"#include "sys_params.h"
#include "func_handler.h"
#include "uart2.h"#include #include #define TEMP_HUM_SLAVE_ADDR 2#define TEMP_HUM_VAL_MAX_NUM 2
#define ALERT_BIT_MAX_NUM 30
#define ALERT_BYTE_NUM (ALERT_BIT_MAX_NUM/8+((ALERT_BIT_MAX_NUM%8)!=0))#define GET_ALERT_BIT(val, pos) ((val[pos/8]>>(pos%8))&0x01)typedef struct{ char date[17]; u8 desc;}ALERT;#defineALERT_TABLE_LEN
20static u8 btn_sta[MAIN_WIN_BTN_MAX_NUM] = {0};static u8 btn_addr[MAIN_WIN_BTN_MAX_NUM] = {50, 51, 52, 69, 53, 54, 55, 70, 56, 57, 58, 59};u16 main_win_val[MAIN_WIN_VAL_MAX_NUM];u16 temp_hum_val[TEMP_HUM_VAL_MAX_NUM] = {0};u16 date_val[MAIN_WIN_DATE_MAX_NUM] = {0};u8
alert_val[ALERT_BYTE_NUM] = {0};u8 old_alert_val[ALERT_BYTE_NUM] = {0};ALERT alert_table[ALERT_TABLE_LEN];u16 alert_num = 0;bit is_main_win = 0;void main_win_update(){}void main_win_disp_date()
{ u8 len; len = sprintf(common_buf,"%u:%u", (u16)date_val[3], (u16)date_val[4]); common_buf[len+1] = 0; sys_write_vp(MAIN_WIN_DATE_VP, common_buf,
len/2+2);}void main_win_process_alert()
{ u8 i; for(i=0;i { if(GET_ALERT_BIT(old_alert_val, i)) continue;
if(GET_ALERT_BIT(alert_val, i)) { if(alert_num>=ALERT_TABLE_LEN) alert_num = ALERT_TABLE_LEN-1;
alert_table[alert_num].desc = i+1; sprintf(alert_table[alert_num].date, "%u/%u/%u %u:%u", date_val[0], date_val[1],
date_val[2], date_val[3], date_val[4] ); alert_num++; } }
memcpy(old_alert_val, alert_val, sizeof(alert_val));}void main_win_disp_alert(){ u16 i; u16 val; u16 len = 0; common_buf[0] = 0; for(i=0;i { val = 0; if(i { val = alert_table.desc; len += sprintf(common_buf+len, "%s\r\n", alert_table.date); } sys_write_vp(ALERT_WIN_DESC_START_VP+i, (u8*)&val, 1); }
common_buf[len+1] = 0; sys_write_vp(ALERT_WIN_DATE_VP, common_buf, len/2+2);}void main_win_init(){ float fixed_val; u8 i; is_main_win = 1;
main_win_val[5] = (u16)(temp_hum_val[0]/10.0+0.5f); main_win_val[6] = (u16)(temp_hum_val[1]/10.0+0.5f); for(i=0;i { if(i==0) continue;sys_write_vp(MAIN_WIN_WIND_SPEED_VP+MAIN_WIN_VAL_OFFSET*i, (u8*)&main_win_val, 1); } fixed_val = main_win_val[0]/WIND_SPEED_SCALE+FLOAT_FIX_VAL; sys_write_vp(MAIN_WIN_WIND_SPEED_VP, (u8*)&fixed_val, 2);}void main_win_click_handler(u16 btn_val){ u8 index; if(btn_val==0x0B) { main_win_disp_alert(); return; } index = btn_val-1; btn_sta[index] = !btn_sta[index];
if((index==3)||(index==7)) btn_sta[index] = 1; modbus_write_bit(btn_addr[index], btn_sta[index]?0xFF00:0x0000); btn_val = btn_sta[index];sys_write_vp(MAIN_WIN_BTN_STA_START_VP+MAIN_WIN_BTN_STA_OFFSET*index, (u8*)&btn_val, 1); if(index==9) is_main_win = 0; else if((index==3)||(index==7)) { while(sys_get_touch_sta()); modbus_write_bit(btn_addr[index], 0x0000); }}
void main_win_msg_handler(u8 *msg,u16 msg_len){ u8 f_code = msg[MODBUS_RESPOND_POS_FUNC_CODE];
u8 data_len = msg[MODBUS_RESPOND_POS_DATA_LEN]; u8 i; u8 offset; msg_len = msg_len; if(!is_main_win) return;if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==MAIN_WIN_VAL_MAX_NUM*2)) { offset = MODBUS_RESPOND_POS_DATA; for(i=0;i { main_win_val = SYS_GET_U16(msg[offset], msg[offset+1]); offset += 2; } main_win_update(); }
else if((f_code==MODBUS_FUNC_CODE_01)&&(data_len==ALERT_BYTE_NUM)) { offset = MODBUS_RESPOND_POS_DATA; for(i=0;i { alert_val = msg[offset]; offset++; }
main_win_process_alert(); }else if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==TEMP_HUM_VAL_MAX_NUM*2))
{ offset = MODBUS_RESPOND_POS_DATA; for(i=0;i { temp_hum_val = SYS_GET_U16(msg[offset], msg[offset+1]);
offset += 2; modbus_write_word(5+i, temp_hum_val); } main_win_update(); }else if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==MAIN_WIN_DATE_MAX_NUM*2)) { offset = MODBUS_RESPOND_POS_DATA; for(i=0;i { date_val = SYS_GET_U16(msg[offset], msg[offset+1]); offset += 2; } main_win_disp_date(); }}void main_win_read_temp_hum(){ u8 old_slave_addr = SLAVE_ADDR; sys_params.user_config[5] = TEMP_HUM_SLAVE_ADDR; modbus_read_words(0, TEMP_HUM_VAL_MAX_NUM); sys_params.user_config[5] = old_slave_addr;//还原}void main_win_handler(){ static u8 flag = 0; if(is_main_win) { if(alert_read_period==ALERT_READ_PERIOD) { alert_read_period = 0; modbus_read_bits(510, ALERT_BIT_MAX_NUM); return; } if(date_update_period==DATE_UPDATE_PERIOD) { date_update_period = 0; modbus_read_words(180, MAIN_WIN_DATE_MAX_NUM); return; } flag = !flag; if(flag) modbus_read_words(0, MAIN_WIN_VAL_MAX_NUM); else main_win_read_temp_hum(); }}
modbus rtu代码参考:
#include "modbus.h"#include "crc16.h"#include "sys_params.h"#define UART_INCLUDE "uart2.h"#define UART_INIT uart2_init#define UART_SEND_BYTES uart2_send_bytes#define UART_BAUD 9600#define MODBUS_RECV_TIMEOUT (u8)(35000.0f/UART_BAUD+2)#define MODBUS_SEND_INTERVAL 150#include UART_INCLUDEstatic bit is_modbus_recv_complete = 0;static u8 modbus_recv_buff[270];
static u16 modbus_recv_len = 0;//接受的总字节长度
static u8 modbus_recv_timeout = 0;//接受溢出时间static volatile u16 modbus_send_interval = 0;MODBUS_PACKET packet;void modbus_init()
{ UART_INIT(UART_BAUD);}void modbus_send_bytes(u8 *bytes,u16 len){ UART_SEND_BYTES(bytes,len);}
void modbus_recv_byte(u8 byte){ if(is_modbus_recv_complete) return; if(modbus_recv_len { modbus_recv_timeout--; if(modbus_recv_timeout==0) { is_modbus_recv_complete = 1; } }} u8 modbus_send_packet(u8 *packet) { u16 len; u16 crc; u8 func_code = packet[1]; while(modbus_send_interval); if(func_code==MODBUS_FUNC_CODE_10) { ((MODBUS_10_PACKET*)packet)->byte_num = ((MODBUS_10_PACKET*)packet)->word_num*2; len = 9+((MODBUS_10_PACKET*)packet)->byte_num; } else if(func_code==MODBUS_FUNC_CODE_0F) { len = ((MODBUS_0F_PACKET*)packet)->bit_num; ((MODBUS_0F_PACKET*)packet)->byte_num = len/8+(len%8?1:0); len = 9+((MODBUS_0F_PACKET*)packet)->byte_num; }else { len = sizeof(MODBUS_PACKET); } crc = crc16(packet,len-2); packet[len-2] = (u8)(crc>>8); packet[len-1] = (u8)crc; modbus_send_bytes(packet,len); modbus_send_interval = MODBUS_SEND_INTERVAL; return 0;//成功}extern void modbus_msg_handler(u8 *msg,u16 msg_len);void modbus_handler(){ u16 crc; if(!is_modbus_recv_complete) return; //校验crc值 crc = ((u16)modbus_recv_buff[modbus_recv_len-2]<<8)+modbus_recv_buff[modbus_recv_len-1]; if(crc16(modbus_recv_buff,modbus_recv_len-2)==crc) { modbus_msg_handler(modbus_recv_buff,modbus_recv_len); } modbus_recv_len = 0; is_modbus_recv_complete = 0; }u8 modbus_send_fcode(u8 fcode, u16 addr, u16 len){ packet.slave_addr = SLAVE_ADDR; packet.func_code = fcode;//功能码 packet.start_addr = addr;//地址 packet.data_len = len;//写入的值 len = modbus_send_packet((u8*)&packet); return len;}
-
电源
+关注
关注
184文章
17586浏览量
249495 -
ModBus协议
+关注
关注
3文章
174浏览量
33388 -
迪文屏
+关注
关注
3文章
76浏览量
5373 -
智能屏幕
+关注
关注
0文章
65浏览量
3315
发布评论请先 登录
相关推荐
第二届“开源鸿蒙班”开班,深开鸿与深信院深化智能物联网特色人才培养

【开源获奖案例】基于T5L智能屏的汽车抬头显示器方案

【开源获奖案例】基于T5L智能屏的便携功率计解决方案
迅龙软件加入甲辰计划“开源实习生联合招聘培养”项目,共建RISC-V 开源生态
浅谈杭州高校大学智能制造实验室数字孪生可视化系统平台建设项目
【开源获奖案例】基于T5L智能屏的指纹识别解决方案
RISC-V国际人才培养认证中心启动仪式在上海成功举办

【开源获奖案例】迪文屏与安卓手机双向联动控制音乐播放
Nullmax旗下智能驾驶方案MaxDrive凭借全面的行泊一体优势获奖

【开源获奖案例】多功能称重器
算能受邀出席2024全球开发者先锋大会(GDC)——RISC-V产业人才培养峰会

【开源获奖案例】隔空手势识别测试系统
OpenHarmony创新赛圆满落幕,获奖名单揭晓!

【开源获奖案例】四轴机械臂控制系统
开放原子校源行走进苏南,加速开源人才培养和创新能力提升






 工商网监
工商网监
评论