 KUKA smartPAD 2示教器的使用方法
KUKA smartPAD 2示教器的使用方法

通过 smartPAD 2 可以对 KR C5 进行全面操作和编程。smartPAD 2 是一台独立的“计算机”,采用基于 Linux 的操作系统。通过 EtherCAT 传输安全操作元件(例如紧急停止和使能开关),并与控制器的系统板建立“远程连接”。

smartPAD 上的 USB 端口可用于复制和存档。smartPAD 1 的背面有一个USB 端口。smartPAD 2 的正面有两个 USB 端口。
smartPAD 的 USB 端口不能用于上传或备份硬盘镜像。
插上和拔下 smartPAD
• 在机器人控制器运行期间可以通过请求键拔出 smartPAD。smartPAD 可以在任何时间和任何运行模式下拔出。
• 插上后,smartPAD 会采用机器人控制器当前的运行模式。插入时,smartPAD 版本(固件版本)无关紧要。
• 插入 30 秒后,紧急停止和使能开关方可再次恢复功能。自动重新显示smartHMI(用户界面)(在 15 秒内)。

'
按下 smartPAD 上的脱开请求键。
出现一个带有计时器的信息窗口。
计时器会计时 30 秒。在这段时间内可将 smartPAD 从机器人控制器上拔下。
‒ 如果在计时器未运行的情况下拔下 smartPAD,将会触发本地紧急停止。
‒ 只有重新插上 smartPAD 才能取消本地紧急停止。
从 KR C5 控制柜上拔下 smartPAD。

• 如果在未事先按下请求脱开按键的情况下拔下 smartPAD,则会触发本地紧急停止。
• 如果按下按键触发了请求、但在 25 秒脱开时限已过后才拔掉,也同样会触发本地紧急停止。
• 如果机器人在设备组中运行,可以通过上级安全控制器触发设备紧急
停止。
smartPAD 更新
在启动期间可能会自动更新 smartPAD。这通常是由控制软件更新发起的。此更新过程不得中断。smartPAD 自身的操作系统通过控制器“降级或升级”。
更换电缆
1. 从控制柜/控制器上拔下 SmartPAD 2。
2. 卸下盖板上的 4 个 TORX 盘头螺钉。

3. 翻开并拆下盖板。
4. 将电缆从电缆屏蔽夹中拔出。
5. 按下插头 X0300 上的凸耳并解锁。拔下插头。
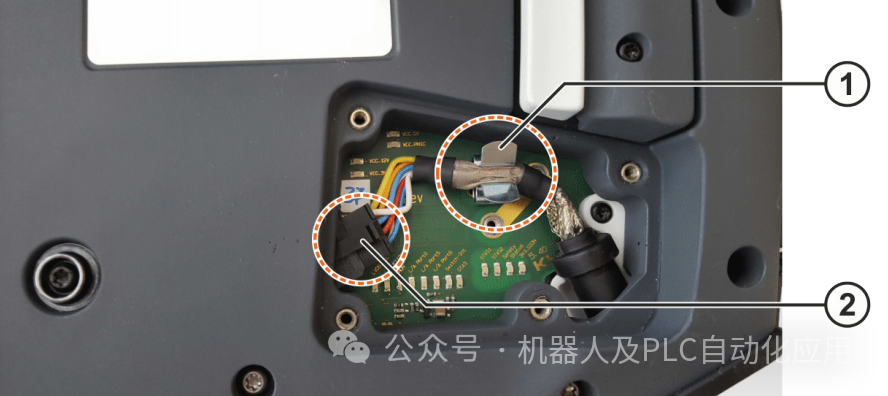
1 电缆屏蔽夹
2 连接电缆的插头 X0300
6. 小心地将电缆从 smartPAD 2 中拉出。同时注意不要损坏电路板上的任何部件。

审核编辑:汤梓红
-
控制器
+关注
关注
112文章
16488浏览量
179815 -
机器人
+关注
关注
211文章
28750浏览量
208930 -
Linux
+关注
关注
87文章
11355浏览量
210674 -
KUKA
+关注
关注
3文章
217浏览量
16631
原文标题:KUKA smartPAD 2
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

没有示教器,还能控制机器人吗?

KUKA.Ethernet KRL.学习心得
【技术分享】带你认识什么是“示教器”

【技术分享】带你认识什么是“示教器”


协作机器人拽拖示教详解
示教器的革新:无线连接,无限可能





 工商网监
工商网监
评论