 EtherCAT驱动器回零与控制器回零:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT驱动器回零与控制器回零:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
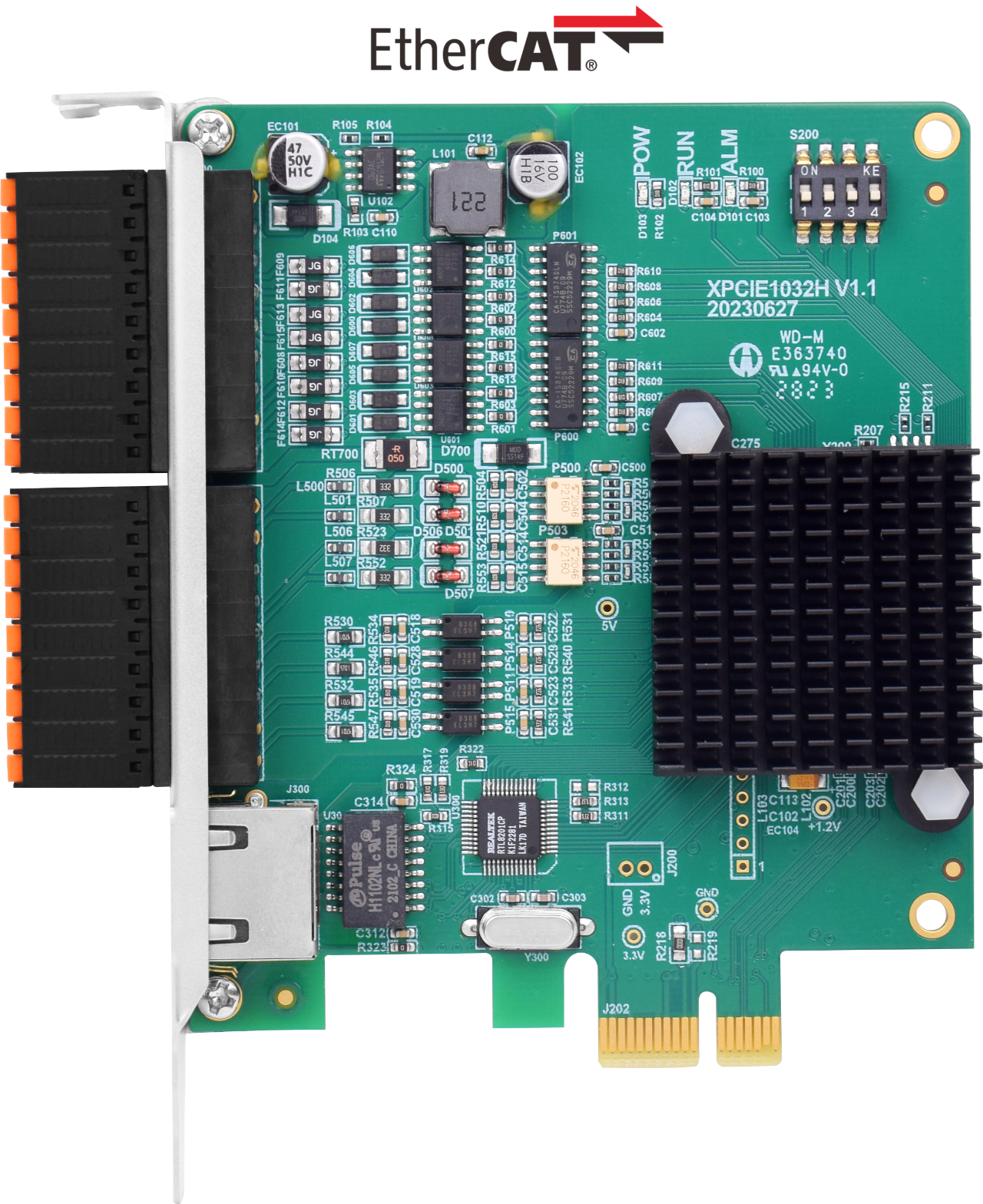
XPCIE1032H功能简介
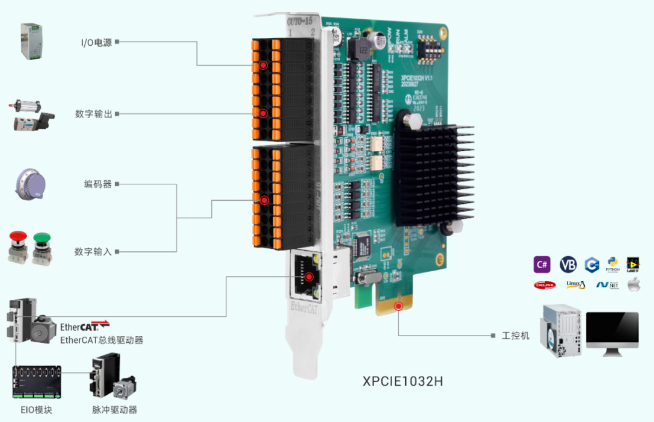
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。
XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动控制实时软核,解决了高速高精应用中,PC Windows开发的非实时痛点,指令交互速度比传统的PCI/PCIe快10倍。

XPCIE1032H支持PWM,PSO功能,板载16进16出通用IO口,其中输出口全部为高速输出口,可配置为4路PWM输出口或者16路高速PSO硬件比较输出口。输入口含有8路高速输入口,可配置为4路高速色标锁存或两路编码器输入。
XPCIE1032H搭配MotionRT7实时内核,使用本地LOCAL接口连接,通过高速的核内交互,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间可以达到3-5us左右。
➜XPCIE1032H与MotionRT7实时内核的配合具有以下优势:
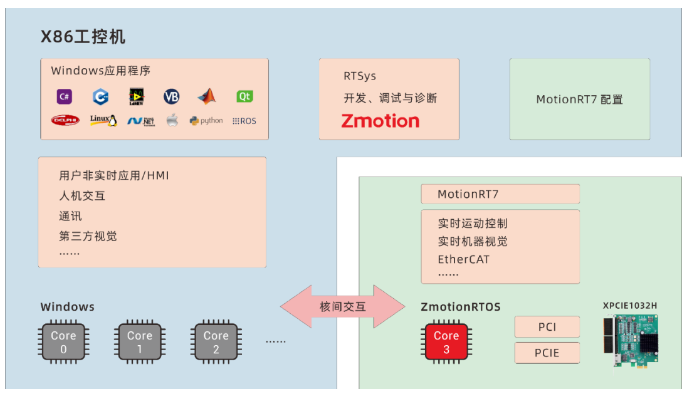
1.支持多种上位机语言开发,所有系列产品均可调用同一套API函数库;
2.借助核内交互,可以快速调用运动指令,响应时间快至微秒级,比传统PCI/PCIe快10倍;
3.解决传统PCI/PCIe运动控制卡在Windows环境下控制系统的非实时性问题;
4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量控制等应用;
5.提供高速输入接口,便于实现位置锁存;
6.支持EtherCAT总线和脉冲输出混合联动、混合插补。

➜使用XPCIE1032H和MotionRT7进行项目开发时,通常需要进行以下步骤:
1.安装驱动程序,识别XPCIE1032H;
2.打开并执行文件“MotionRT710.exe”,配置参数和运行运动控制实时内核;
3.使用ZDevelop软件连接到控制器,进行参数监控。连接时请使用PCI/LOCAL方式,并确保ZDevelop软件版本在3.10以上;
4.完成控制程序开发,通过LOCAL链接方式连接到运动控制卡,实现实时运动控制。

➜与传统PCI/PCIe卡和PLC的测试数据结果对比:
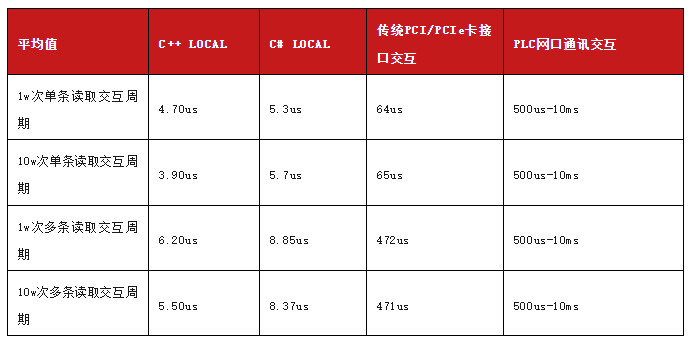
我们可以从测试对比结果看出,XPCIE1032H运动控制卡配合实时运动控制内核MotionRT7,在LOCAL链接(核内交互)的方式下,指令交互的效率是非常稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,非常适用于高速高精的应用。
XPCIE1032H控制卡安装
关闭计算机电源。
打开计算机机箱,选择一条空闲的XPCIE卡槽,用螺丝刀卸下相应的挡板条。
将运动控制卡插入该槽,拧紧挡板条上的固定螺丝。
XPCIE1032H驱动安装与建立连接参考往期文章EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接。
一、C#语言进行运动控制项目开发

2.解压下载的安装包找到“ Zmcaux.cs ”,“ zauxdll.dll ”,“ zmotion.dll ”放入到项目文件中。
(1)“Zmcaux.cs”放在项目根目录文件中,与bin目录同级。
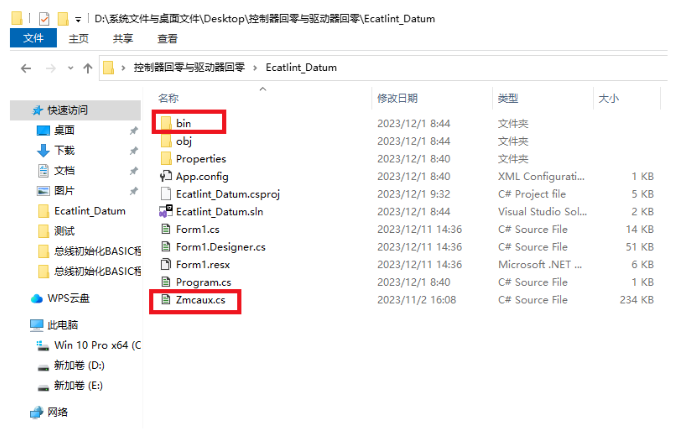
(2)“zauxdll.dll”,“zmotion.dll”放在bin → Debug。

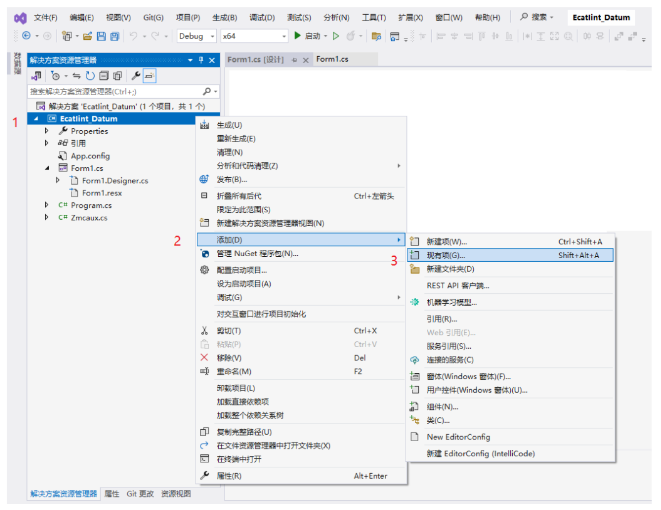
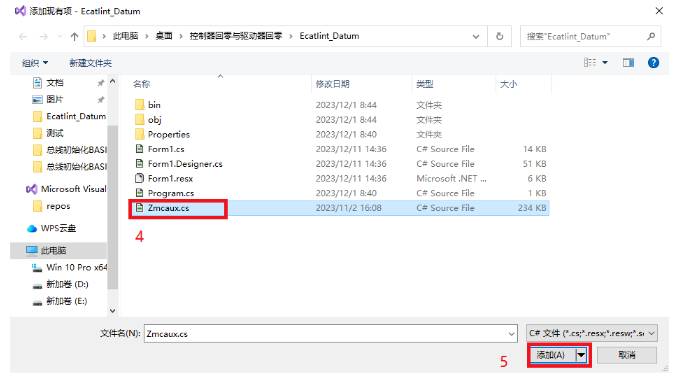
3.用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有,然后鼠标右键点击zmcaux.cs文件,点击包括在项目中。
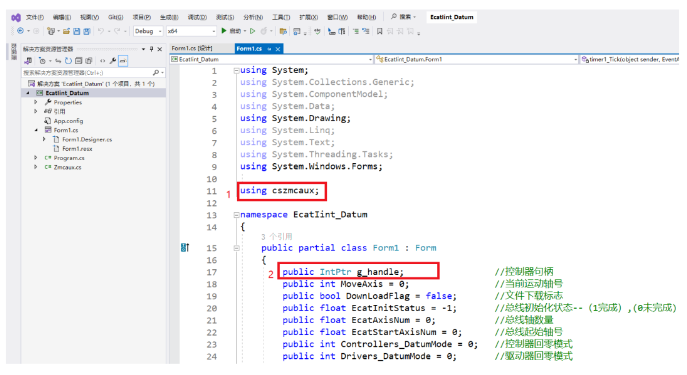
4.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,并声明控制器句柄g_handle。
二、PC函数绍
相关PC函数介绍详情可参考“ZMotion PC函数库编程手册 V2.1.1”。
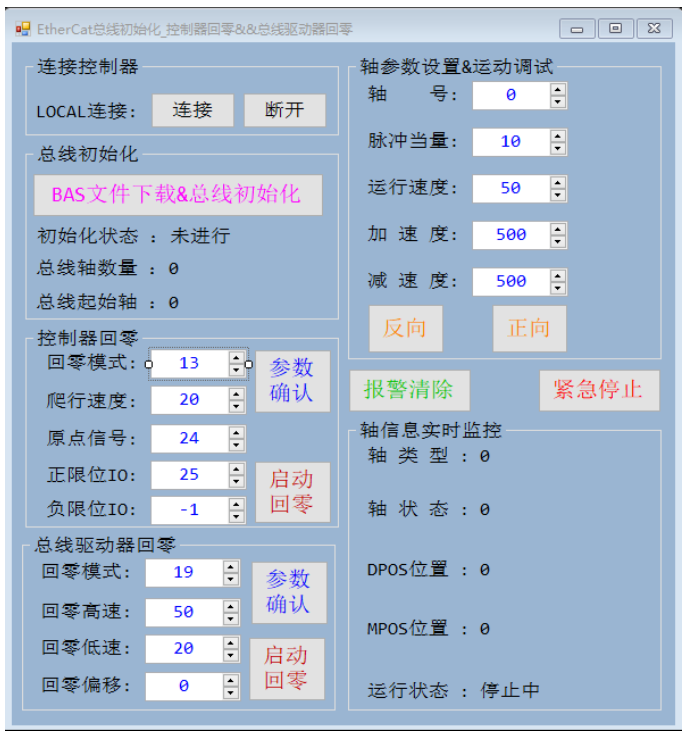
在form设计界面找到需要用到的控件拖拽到窗体中进行UI界面设计,效果如下。
三、相关程序以及设计思路
本次设计操作步骤相应的流程图如下:
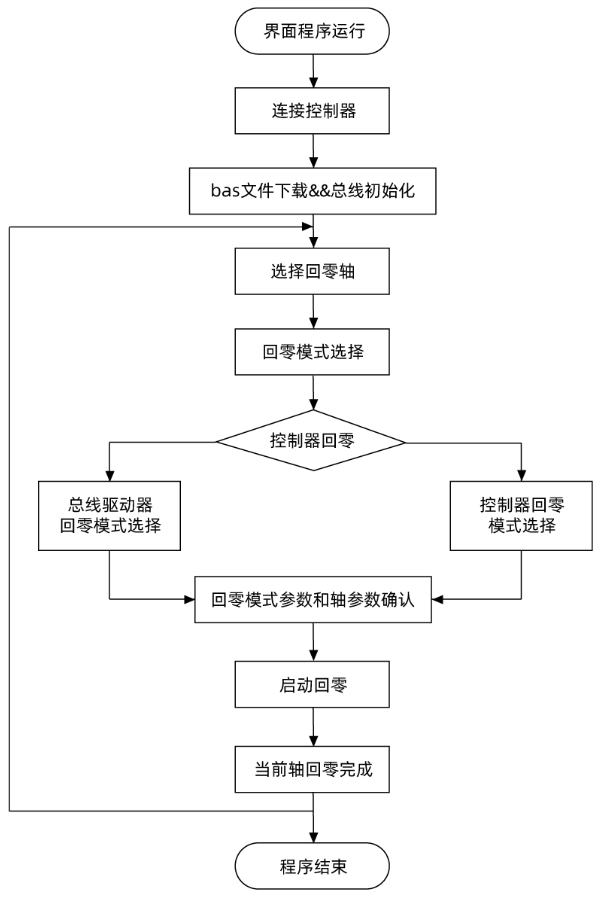
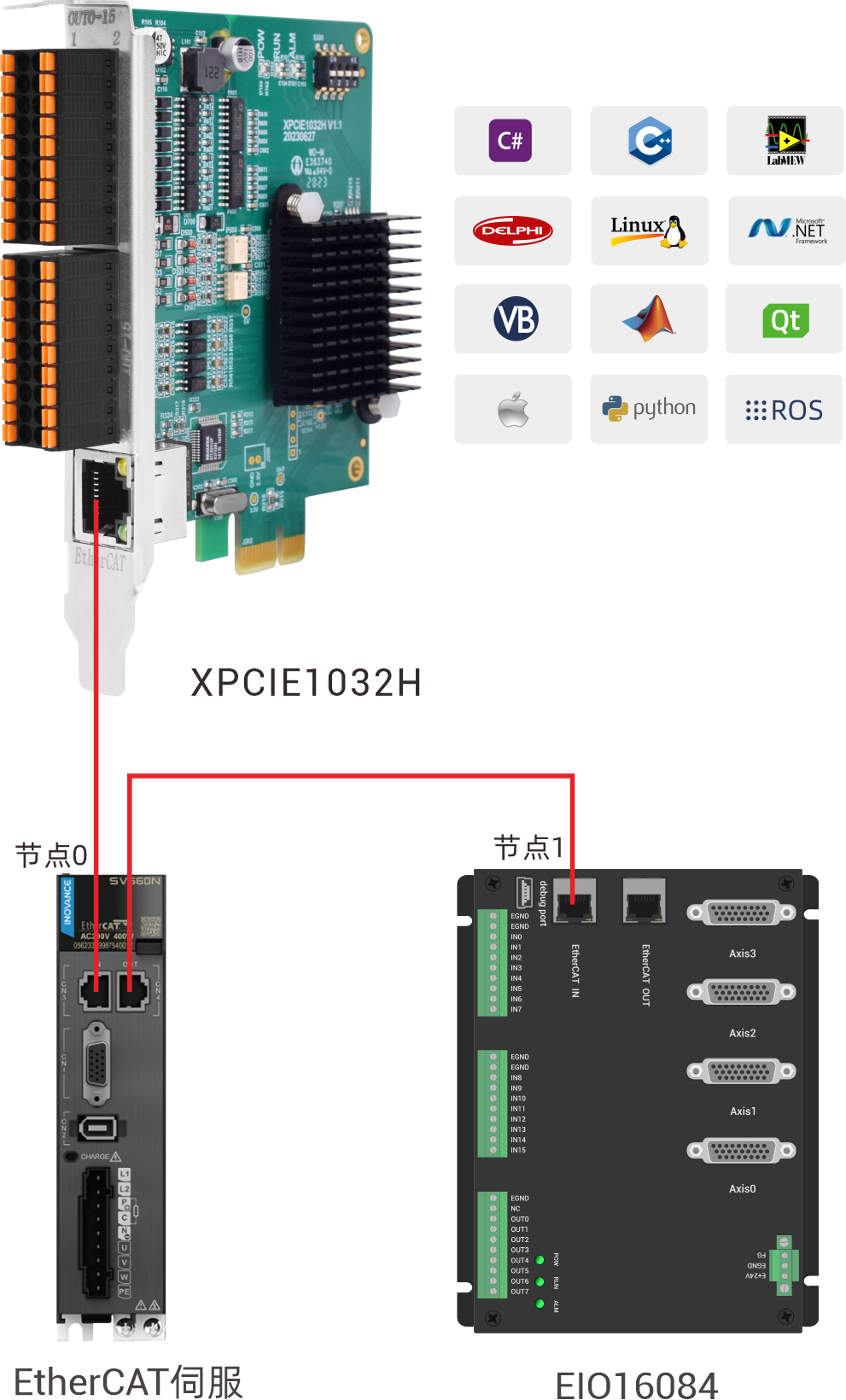
本例程以运动控制卡XPLCIE1032H搭载MotionRT7实时内核,通过EthereCAT总线口接节点0(汇川驱动器-0轴),节点1(正运动扩展模块EIO16084)1-4轴映射为总线轴为例:
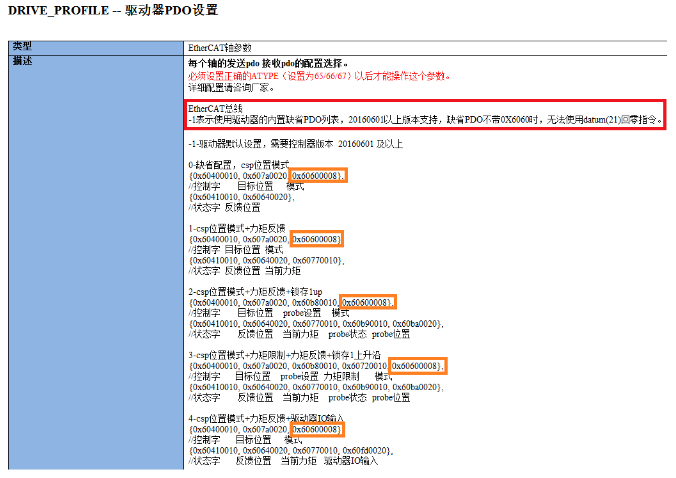
注意:在总线初始化basic程序,驱动器PDO不能设置为-1,因为该PDO列表不含数据字典6060,不支持驱动器回零。
关于pdo列表的配置详细说明,可以查阅basic编程手册,搜索DRIVE_PROFILE指令。
1、初始化程序执行后,通过ZAux_Direct_GetUserVar函数接口,可以读取basic程序自定义的变量。
本节案例获取的是总线初始化映射轴数量、总线初始化起始轴号和总线初始化完成状态。下图是事先编辑好的basic程序的自定义变量。
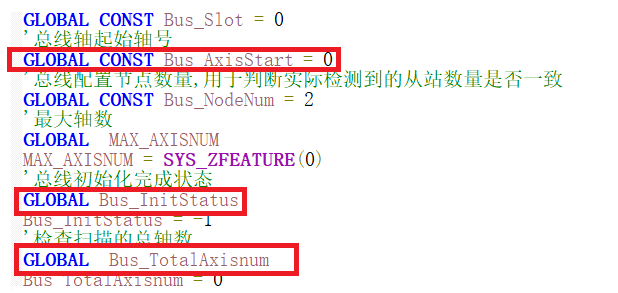
使用定时器将总线轴数量,总线起始轴号,初始化状态等总线初始化信息进行获取更新。
//读取basic程序自定义变量--总线初始化的总轴数 zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_TotalAxisnum", ref EcatAxisNum); //读取basic程序自定义变量--总线初始化的总线起始轴号 zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_AxisStart", ref EcatStartAxisNum); //读取basic程序自定义变量--总线初始化的初始化状态 zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_InitStatus", ref EcatInitStatus)
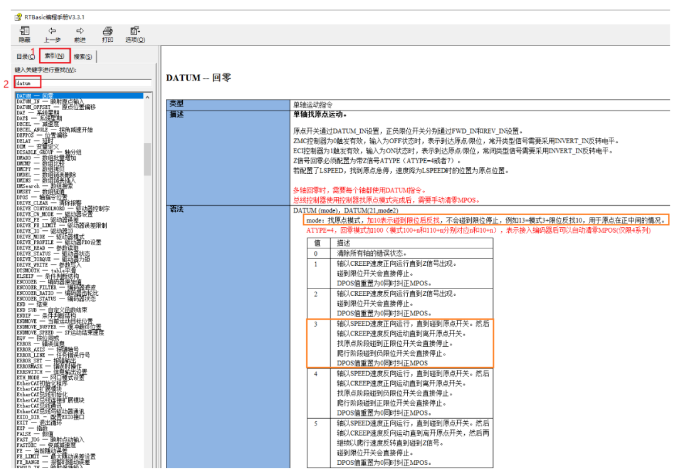
2、使用RTsys软件,点击软件菜单栏的帮助→Zbasic帮助→搜索,搜索DATUM指令,选择回零模式并设置回零模式对应的参数。
假设回零模式选择的是13,需要设置原点开关、限位开关、回零速度(SPEED)和爬行速度(CREEP)。
该模式进行回零时轴以SPEED速度正向运行,碰到限位开关会反向查找原点。找到原点后以CREEP速度反向爬行,直到离开原点。
private void Controllers_DatumPara_Button_Click(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未连接到控制器!", "提示"); } else { //轴基本参数设置,控制器回零的速度是SPEED AxisParaSet(); int[] ret = new int[7]; //设置回零爬行速度 ret[0] = zmcaux.ZAux_Direct_SetCreep(g_handle, MoveAxis, Convert.ToSingle(Datum_Creep_Value.Text)); //配置原点信号。ZMC系列默认OFF时信号有效,常开传感器需要反转输入口为ON ret[1] = zmcaux.ZAux_Direct_SetDatumIn(g_handle, MoveAxis, Convert.ToInt32(DatumIO_Value.Text)); ret[2] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(DatumIO_Value.Text), 1); //正硬限位IO设置 ret[3] = zmcaux.ZAux_Direct_SetFwdIn(g_handle, MoveAxis, Convert.ToInt32(FWD_IO_Value.Text)); ret[4] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(FWD_IO_Value.Text), 1); //负硬限位IO设置 ret[5] = zmcaux.ZAux_Direct_SetRevIn(g_handle, MoveAxis, Convert.ToInt32(REV_IO_Value.Text)); ret[6] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(REV_IO_Value.Text), 1); //设置控制器回零模式 Controllers_DatumMode = Convert.ToInt32(Controllers_DatumMode_Value.Text); //定义临时的变量记录各个函数的返回值 int FinalRet = -1; for(int i = 0; i < 7; ++i) { FinalRet *= ret[i]; } if (FinalRet == 0) //说明所有函数的返回值都是0,回零等参数均设置成功 { MessageBox.Show("控制器回零参数设置成功!", "提示"); } else { MessageBox.Show("控制器回零参数设置失败!", "提示"); } } }
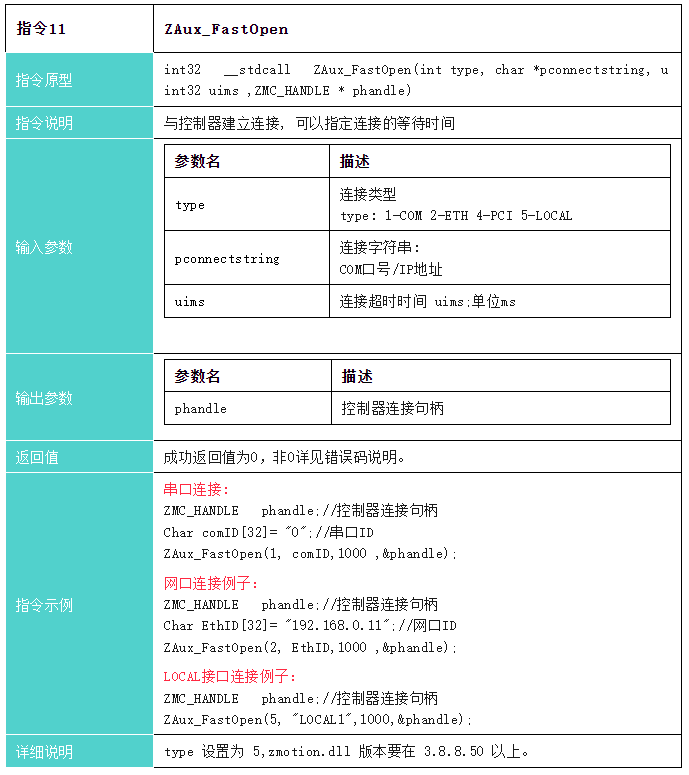
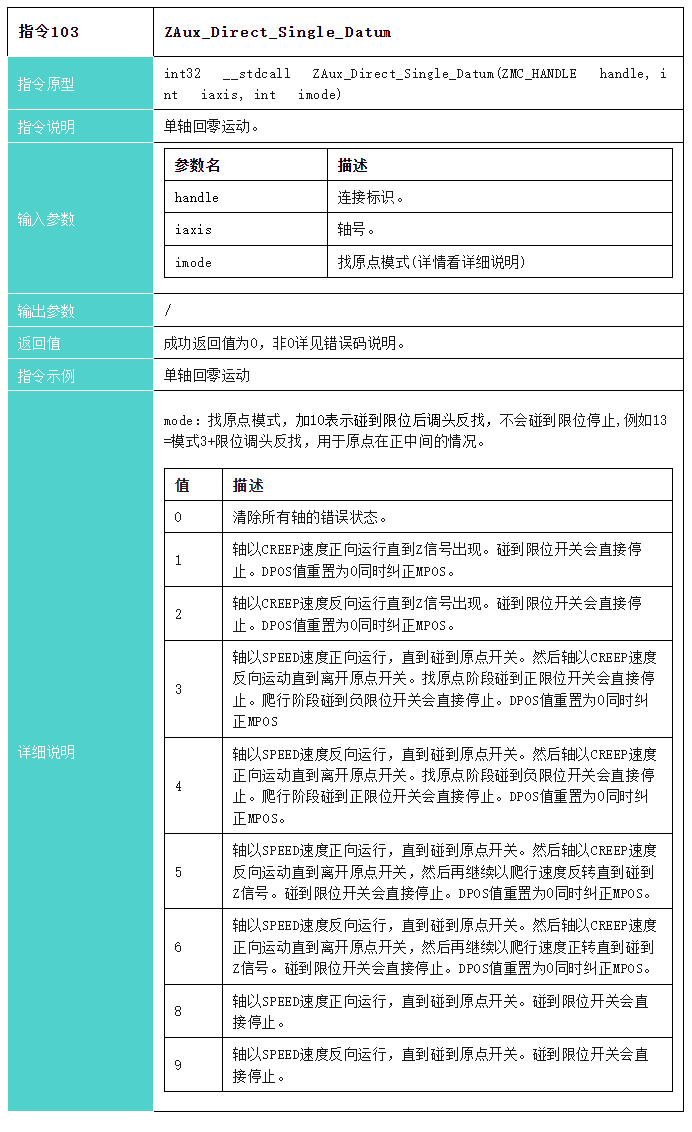
3、使用ZAux_Direct_Single_Datum函数,函数语法如下:
语法:ZAux_Direct_Single_Datum(连接句柄,轴号,控制器回零模式)
选择回零的轴号,模式以及设置完参数,确认参数按钮然后点击回零按钮,此时轴以控制器回零参数进行回零。
private void Controllers_Datum_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未连接到控制器!", "提示");
return;
}
int ret = -1;
//触发示波器
zmcaux.ZAux_Trigger(g_handle);
//控制器回零
ret = zmcaux.ZAux_Direct_Single_Datum(g_handle, MoveAxis, Controllers_DatumMode);
if(ret != 0)
{
MessageBox.Show("控制器回零启动失败!", "提示");
}
else
{
MessageBox.Show("控制器回零启动成功!", "提示");
}
}
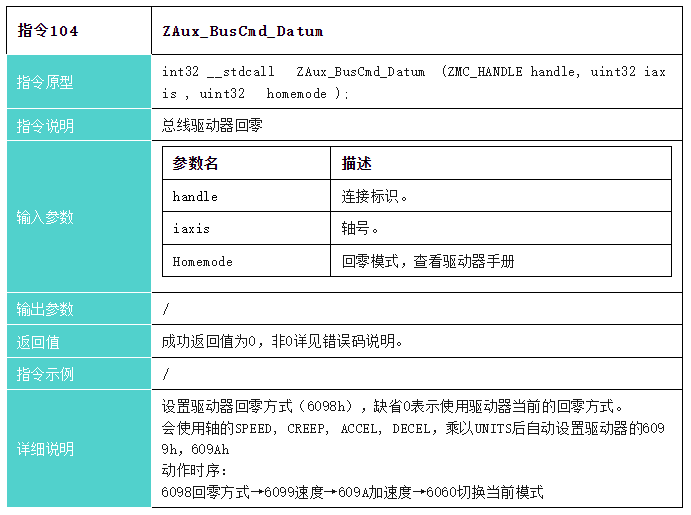
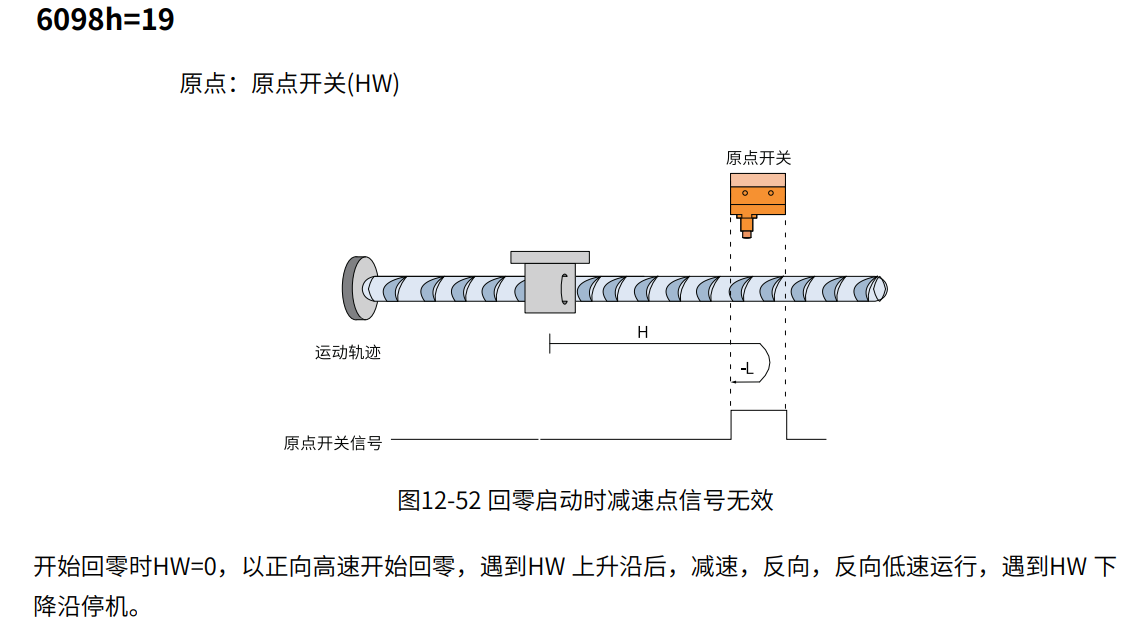
4、查阅驱动器手册→回零模式介绍,选择驱动器支持的回零模式(数据字典6098),然后设置该回零模式的回零高速,回零低速等参数。
在本次例程选择的是模式19,开始回零时原点开关(HW)为0,以设置的回零高速Speed(50units/s)正向开始回零,遇到原点开关(HW)为1后以回零低速Creep(20units/s)反向爬行,直到原点开关(HW)为0时停机,回零完成。
private void Drivers_DatumPara_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未连接到控制器!", "提示");
return;
}
int ret1, ret2, ret3;
//设置驱动器回零高速
ret1 = zmcaux.ZAux_Direct_SetSpeed(g_handle, MoveAxis, Convert.ToSingle(Datum_HighSpeed_Value.Text));
//设置驱动器回零低速
ret2 = zmcaux.ZAux_Direct_SetCreep(g_handle, MoveAxis, Convert.ToSingle(Datum_LowSpeed_Value.Text));
//设置驱动器回零偏移
ret3 = zmcaux.ZAux_BusCmd_SetDatumOffpos(g_handle, (uint)MoveAxis, Convert.ToSingle(Datum_OffSet_Value.Text));
//设置驱动器回零模式
Drivers_DatumMode = Convert.ToInt32(Drivers_DatumMode_Value.Text);
if (ret1 == 0 && ret2 == 0 && ret3 == 0)
{
MessageBox.Show("驱动器回零参数设置成功!", "提示");
}
else
{
MessageBox.Show("驱动器回零参数设置失败!", "提示");
}
}
5、使用ZAux_BusCmd_Datum函数,函数语法如下:
语法:ZAux_BusCmd_Datum(连接句柄,轴号,驱动器回零模式)
选择回零的轴号,模式以及设置完参数,确认参数按钮然后点击回零按钮,此时轴以驱动器回零参数进行回零。
private void Drivers_Datum_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未连接到控制器!", "提示");
return;
}
int ret = -1;
//触发示波器
zmcaux.ZAux_Trigger(g_handle);
//驱动器回零
ret = zmcaux.ZAux_BusCmd_Datum(g_handle, (uint)MoveAxis, (uint)Drivers_DatumMode);
if (ret != 0)
{
MessageBox.Show("驱动器回零启动失败!", "提示");
}
else
{
MessageBox.Show("驱动器回零启动成功!", "提示");
}
}
四、运行效果
打开RTsys编程软件,通过Local连接到控制器,同步上位机的轴等等参数。然后在工具栏→示波器界面,打开示波器观察波形。
选择好数据源和编号,点击启动;在上位机界面点击回零按钮,回到RTsys软件点击手动触发,观察对应回零模式的波形。

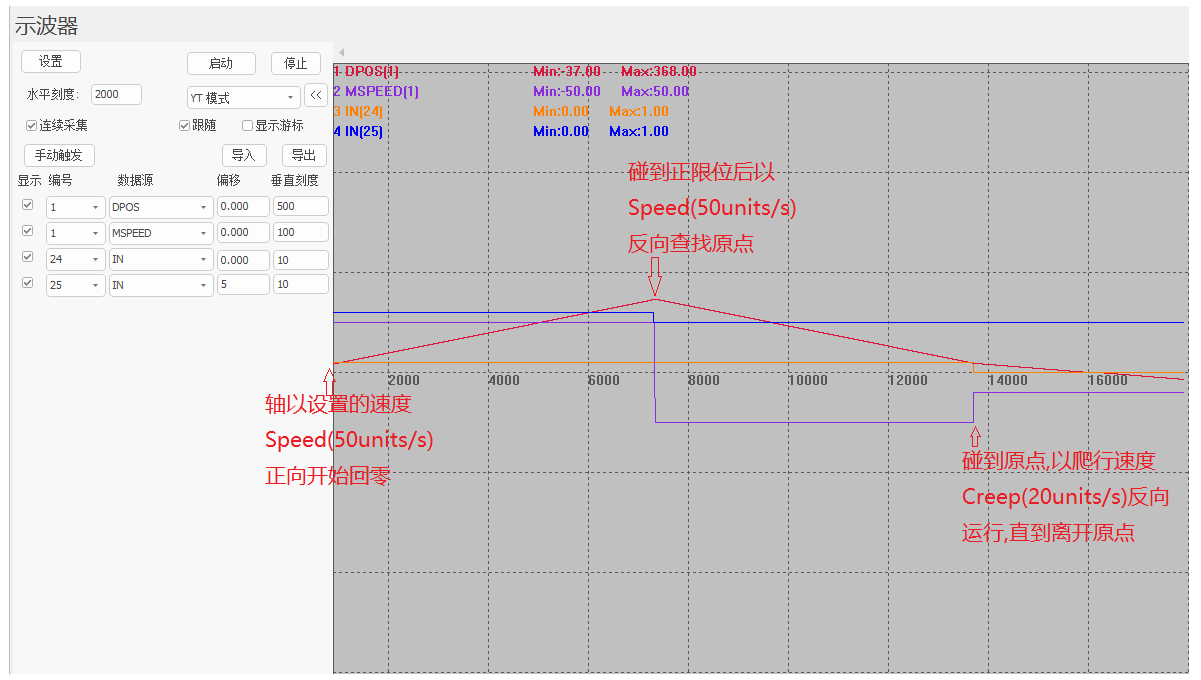
⊙控制器回零:以模式13(轴以SPEED速度正向运行,碰到限位开关会反向查找原点。找到原点后以Creep速度反向爬行,直到离开原点)为例,抓取的图形如下。
⊙总线驱动器回零:查阅驱动器手册,选择驱动器支持的回零模式。
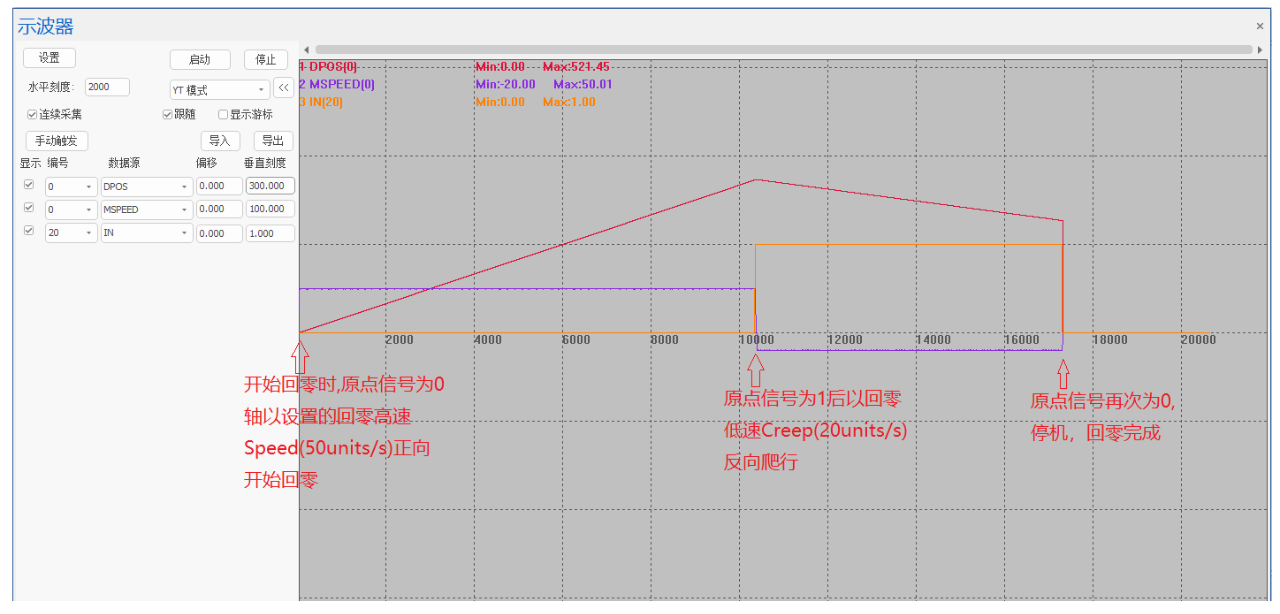
这里以模式19为例,回零启动时,原点信号为0,以回零高速(50units/s)正向回零运行;当原点信号为1时以回零低速Creep(20units/s)反向爬行;再次遇到下降沿将停机,回零完成。
审核编辑 黄宇
-
控制器
+关注
关注
113文章
16555浏览量
180276 -
运动控制卡
+关注
关注
7文章
114浏览量
15575 -
ethercat
+关注
关注
19文章
786浏览量
39076
发布评论请先 登录
相关推荐
EtherCAT运动控制卡XPCIE1032H上位机开发(一):驱动安装

单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)



不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡(二):EtherCAT总线初始化

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论