 什么是PID控制器?PID控制器积分控制介绍
什么是PID控制器?PID控制器积分控制介绍
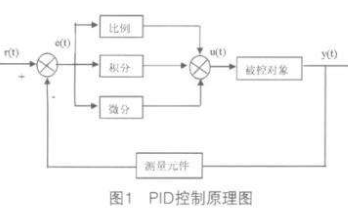
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。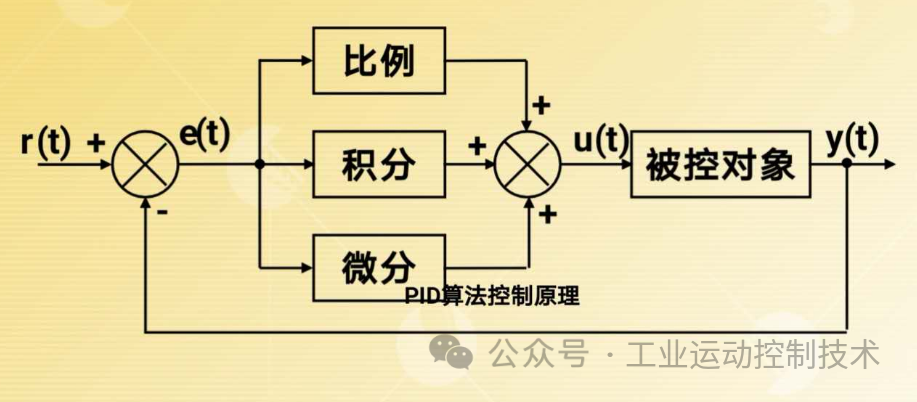
一、PID控制器
PID控制理念最早提出是在1932年,出生于瑞典后移民美国的物理学家哈利奈奎斯特(H Nyquist),在他的一篇论文当中提出了采用图形的方法来判断系统的稳定性。在他的基础上,荷兰裔科学家亨伯德(H W Bode)(对就你想的那个“伯德图/波特图”创始人)等人建立了一整套在频域范围设计反馈放大器的方法,后被用于自动控制系统的分析和设计,这也是PID算法最早从书面走向实践。
与此同时,反馈控制原理开始应用于工业过程中。1936年英国的考伦德(A Callender)和斯蒂文森(A Stevenson)等人给出了 PID控制器的方法,自此PID算法正式形成了,并且后来在自动控制技术中占有非常重要的地位。
大家一定都见过PID的实际应用。
比如四轴飞行器,再比如平衡小车......还有汽车的定速巡航、3D打印机上的温度控制器....就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID都会派上大用场。
二、PID控制器积分控制
控制器的输出与输入误差信号的积分成正比关系。主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数T,T越大,积分作用越弱,反之则越强。
为什么要引进积分作用?
比例作用的输出与误差的大小成正比,误差越大,输出越大,误差越小,输出越小,误差为零,输出为零。
由于没有误差时输出为零,因此比例调节不可能完全消除误差,不可能使被控的PV值达到给定值。必须存在一个稳定的误差,以维持一个稳定的输出,才能使系统的PV值保持稳定。这就是通常所说的比例作用是有差调节,是有静差的,加强比例作用只能减少静差,不能消除静差。
为了消除静差必须引入积分作用,积分作用可以消除静差,以使被控的y(t)值最后与给定值一致。引进积分作用的目的也就是为了消除静差,使y(t)值达到给定值,并保持一致。 积分作用消除静差的原理是,只要有误差存在,就对误差进行积分,使输出继续增大或减小,一直到误差为零,积分停止,输出不再变化,系统的PV值保持稳定,y(t)值等于u(t)值,达到无差调节的效果。
但由于实际系统是有惯性的,输出变化后,y(t)值不会马上变化,须等待一段时间才缓慢变化,因此积分的快慢必须与实际系统的惯性相匹配,惯性大、积分作用就应该弱,积分时间I就应该大些,反之而然。如果积分作用太强,积分输出变化过快,就会引起积分过头的现象,产生积分超调和振荡。通常I参数也是由大往小调,即积分作用由小往大调,观察系统响应以能达到快速消除误差,达到给定值,又不引起振荡为准。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。PI控制器不但保持了积分控制器消除稳态误差的“记忆功能”,而且克服了单独使用积分控制消除误差时反应不灵敏的缺点。
审核编辑:刘清
-
温度控制器
+关注
关注
1文章
178浏览量
33868 -
控制算法
+关注
关注
4文章
166浏览量
21788 -
PID控制器
+关注
关注
2文章
173浏览量
18667
原文标题:什么是PID控制器?PID控制器控制器中的积分控制是什么?
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐



基于分数阶微积分的PID控制器方法
13个基于PID控制器的设计实例
什么是PID控制器?PID控制器控制器中的积分控制是什么?






 工商网监
工商网监
评论