 KUKA机器人KR QUANTEC-2更换机器人手腕的步骤详解
KUKA机器人KR QUANTEC-2更换机器人手腕的步骤详解
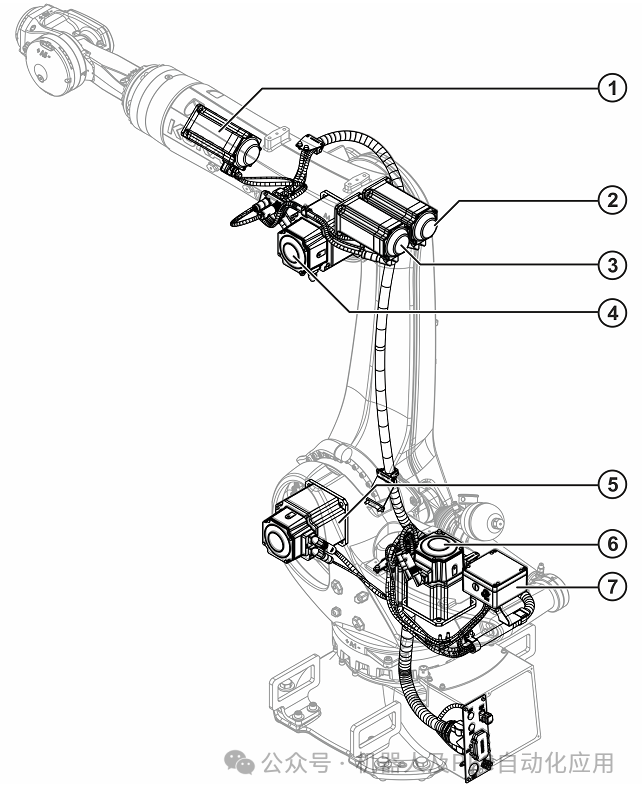
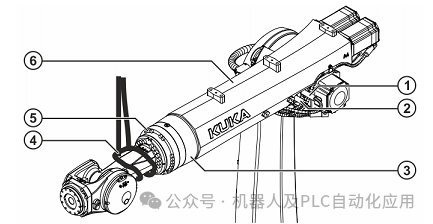
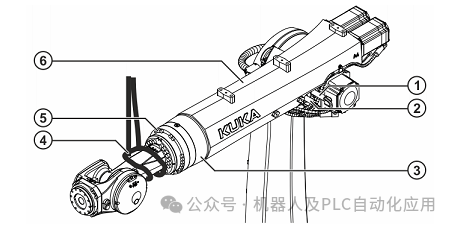
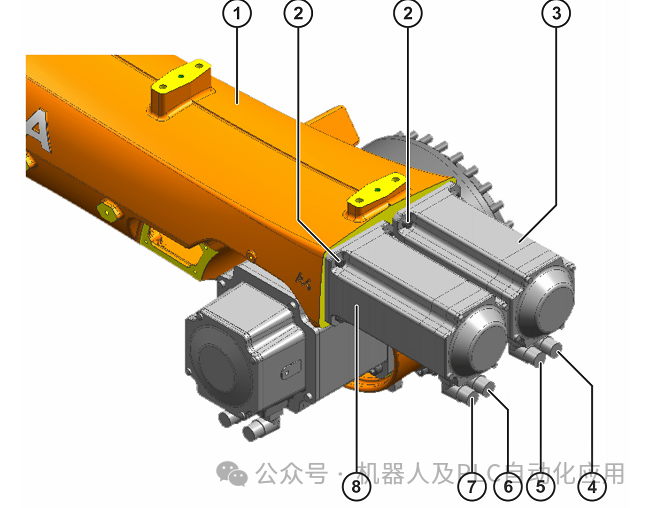
1 A6 电机
2 A5 电机
3 A4 电机
4 A3 电机
5 A2 电机
6 A1 电机
7 RDC 盒
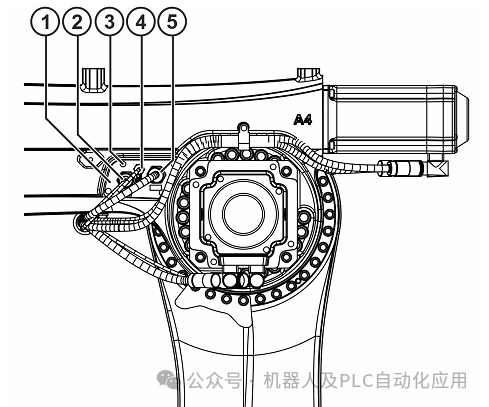
拆卸 A4 电机和 A5 电机,以下工作步骤相同。
1. 将设备插座上的插头 XM4 和 XP4 松开并拔下。
2. 拧出 A4 电机上的 4 根内六角螺栓 M8x25-8.8-A2K。
3. 松开 A4 电机并将其与 A4 连接轴一起拉出;拉出时不要歪斜。
4. 放下 A4 电机与 A4 连接轴。
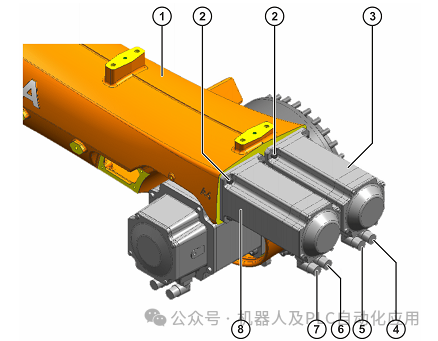
1 机器人小臂
2 内六角螺栓 M8x25-8.8-A2K
3 A5 电机
4 插头 XM5
5 插头 XP5
6 插头 XM4
7 插头 XP4
8 A4 电机
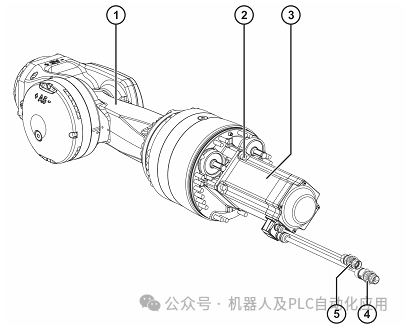
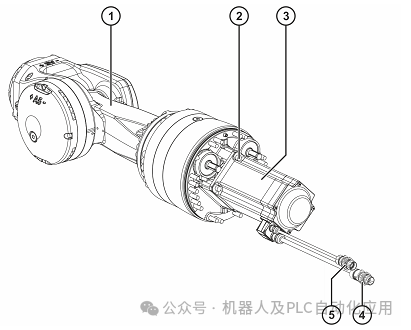
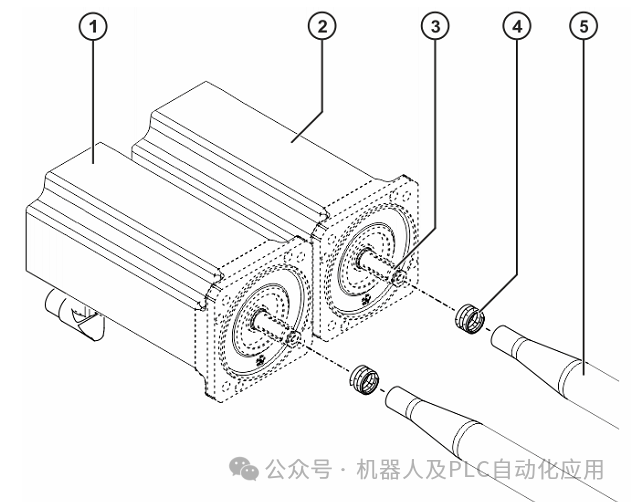
5. 将 A4 连接轴从电机轴上拔下。
6. 从电机轴上取下压缩弹簧和垫圈。
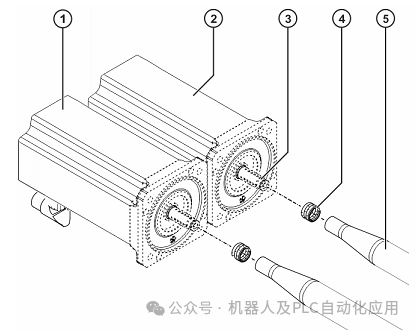
1 A5 电机
2 A4 电机
3 带渐开线齿轮的电机轴
4 压缩弹簧
5 A4 连接轴
7. 如果不重新安装电机,则专业地废弃处理电机或进行防锈处理并存放。
拆卸机器人手腕
将吊带固定在机器人手腕和起重机上。
2. 移动起重机,直至起重机承受机器人手腕的重量。
3. 将电机插头 XM6 和 XP6 从板上松开并拔下。
4. 拧出板上的 4 个内六角螺栓 M6x12-8.8-A2K。
5. 将电机插头 XM6 和 XP6 以及可能有的吹洗空气管从板背面上松开并拔下。
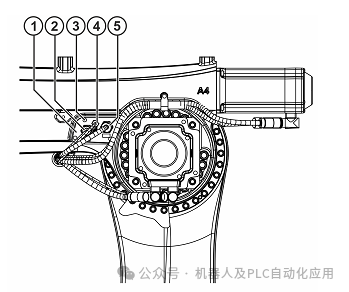
1 板
2 插头 XP6
3 内六角螺栓 M6x12-8.8-A2K
4 吹洗空气(仅限 Foundry)
5 插头 XM6
6. 从机器人手腕中拧出 20 个内六角螺栓 M10x200-10.9。
7. 小心地从机器人小臂上松开机器人手腕并用起重机拉出机器人手腕。拉出时不得歪斜。机器人小臂和机器人手腕之间的间隙在圆周上的任何部位都必须相同。在拉出的同时移动起重机。
1 插头 XM6
2 插头 XP6
3 机器人手腕
4 吊带
5 内六角螺栓 M10x200-10.9
6 机器人小臂
8. 在合适的垫板上放下机器人手腕并拆除吊带。
拆卸 A6 电机
1. 松开并取下 A6 电机上的 4 个内六角螺栓 M8x30-8.8-A2K。
2. 松开并取下 A6 的电机。
1 机器人手腕
2 内六角螺栓 M8x30-8.8-A2K
3 A6 电机
4 插头 XP6
5 插头 XM6
3. 如果不重新安装电机,则专业地废弃处理电机或进行防锈处理并存放。
准备新的机器人手腕
1. 必要时,应给新机器人手腕除去防锈保护。
2. 安装前先清洁所有啮齿,然后涂上少许 润滑脂 Microlube GL 261,但
要涂全。
安装 A6 电机
1. 布置好电机插头 XM6 和 XP6,使其在插入电机后倾斜地位于左下方。
2. 将 A6 的电机装入机器人手腕内;安装时不要歪斜,注意是否正确固定(啮合)。
3. 装入 4 个内六角螺栓 M8x30-8.8-A2K。分几次逐步增加拧紧扭矩至规定的数值。
4. 用螺栓加固漆标记螺栓。
安装机器人手腕
在机器人手腕上固定吊带。
用起重机吊起机器人手腕,运至安装地点并确保轴 4 和 5 位于零位。
3. 将机器人手腕装入机器人小臂,同时将电机电缆穿入机器人小臂并确保其不会缠绕在连接轴上。在插入时不要倾斜并且同时移动起重机。机器人小臂和机器人手腕之间的间隙在圆周上的任何部位都必须相同。
4. 将电机插头 XM6 和 XP6 穿过机器人小臂中的开口并连接在板背面上。
5. 将 20 个新的内六角螺栓 M10x200-10.9 插入机器人手腕。
6. 用扭矩扳手交替拧紧 20 个内六角螺栓 M10x200-10.9。分几次逐步增加拧紧扭矩至规定的数值。
7. 拆除吊带。
8. 用 4 个内六角螺栓 M6x12-8.8-A2K 将板固定在机器人小臂上。
9. 将插头 XM6 和 XP6 以及可能有的吹洗空气管连接在板正面上。注意插头的针脚和编码。在安装插头时要扭动插头,直到感觉到(防扭转)插头卡入到编码中。
安装 A5 电机
对于 A4 电机和 A5 电机,以下工作步骤相同。
1. 如果安装新的电机,则在安装前除去新电机的防锈保护。
2. 清洁 A5 连接轴和 A5 电机轴上的齿轮并检查其是否磨损。在损坏和/或磨损时,必须更换 A5 连接轴。
3. 给 A5 连接轴上的齿部涂上少许油脂 Microlube GL 261,但要涂全。
4. 将压缩弹簧装到 A5 电机轴上。如果在拆卸电机时电机轴上有垫圈,则在安装新的电机时不允许将其重新装入,而是必须废弃处理。
5. 将 A5 连接轴装到 A5 电机轴上。
6. 支承面(A5 电机和机器人小臂)必须无脂和无尘。
7. 布置设备插座 XM5 和 XP5,使其在 A5 电机装入机器人小臂后位于下侧。
8. 吊起 A5 电机,然后装入机器人小臂;安装时不要歪斜,并注意机器人手腕中的连接轴是否正确固定(啮合)。
9. 装入 4 个内六角螺栓 M8x25-8.8-A2K。
10. 用扭矩扳手对角交错拧紧 4 个内六角螺栓 M8x25-8.8-A2K。分几次逐步增加拧紧扭矩至规定的数值。
11. 将插头 XM5 和 XP5 连接到设备插座上。注意插头的针脚和编码。在安装插头时要扭动插头,直到感觉到(防扭转)插头卡入到编码中。
审核编辑:刘清
-
电机
+关注
关注
143文章
9119浏览量
146783 -
RDC
+关注
关注
0文章
25浏览量
9193 -
KUKA机器人
+关注
关注
4文章
143浏览量
9230
原文标题:KUKA 机器人KR QUANTEC-2更换机器人手腕
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论