 KUKA工具/基础管理窗口
KUKA工具/基础管理窗口
工具/基础管理窗口
“概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。
此处使用“工具”选项卡的示例来解释“概述”部分。其他选项卡也是类似的。
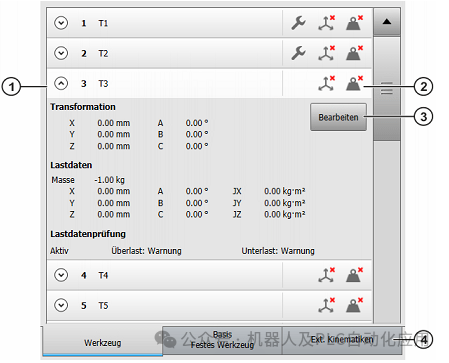
1工具清单。可以通过触摸打开条目。
2图标显示有关测量状态的信息。触摸图标也会将信息显示为文本。
3打开此工具的“编辑”视图。数据可以编辑。
4个选项卡,用于在TOOLS、BASES和外部运动学之间切换
注意:只能通过WorkVisual创建外部运动学。
“概述”部分中的图标
| 框架是一种工具或固定工具。 | |
| 框架是一个基坐标。 | |
| 尚未定义框架类型 | |
| 对框架进行测量。 | |
| 框架的测量数据是用数字输入的。 | |
| 该帧对应于$NULLFRAME。 | |
| 负载数据是自动确定的。 | |
| 负载数据由用户输入。 | |
|
“质量”字段中的值为“-1”。 仍然需要输入正确的负载数据。 |
|
| 基准将指定给WORLD坐标系。 | |
| 将基础指定给外部运动学。 | |
| 局部外部运动学 | |
| 机器人作为机器人团队的参与者。右边的数字表示RoboTeam索引。 | |
| 传送者 |
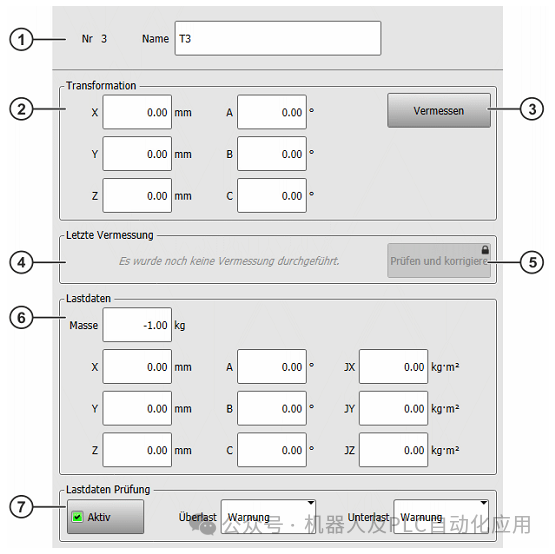
“编辑”窗格中的“工具/基础管理”窗口
此处使用“工具”选项卡的示例来解释“编辑”区域。
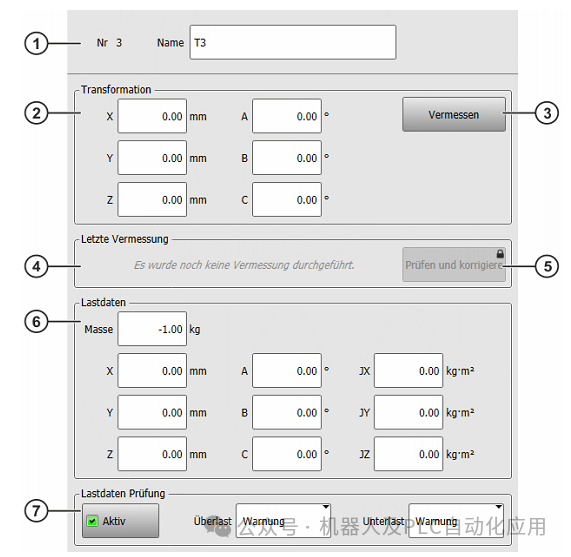
| 1 |
对象的索引和名称 固定工具选项卡:在名称的右侧可以选择对象的类型 |
| 2 |
测量结束后,此处显示转换值。 也可以在此处输入数字。 |
| 3 |
显示可能的测量方法。 触摸一种方法会打开“测量”区域。 可以在那里开始一项(新的)调查。 |
| 4 | 关于上次调查的信息 |
| 5 | 如果已执行测量,则打开此工具的“测量”区域。可以详细查看现有值。如有必要,可在必要时再次接近测量点。更改并重新保存。 |
| 6 |
“工具”选项卡:加载数据 固定工具选项卡:将BASE指定给WORLD坐标系或外部运动学 |
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
28904浏览量
209642 -
工具
+关注
关注
4文章
314浏览量
28002 -
KUKA
+关注
关注
3文章
217浏览量
16674
原文标题:KUKA C 5 “工具/基本管理”窗口
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
第32章 窗口管理器之回调机制
转stemwin教程本期教程开始讲解STemWin的核心内容窗口管理器。通过这几期教程,大家应该明白最基本的窗口管理器知识。了解了这些基本的通信机制后,再学习控件的使用时,就会事半功倍
发表于 10-15 16:27
KUKA机器人问题解答
开机后没有选择工具。 解决方案:配置→当前工具/基坐标→工具号→1 2 专家登陆 一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。 解救方案:配置→用户组→专家→登陆→密码
发表于 07-15 07:48
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于变频器作用于
发表于 09-08 16:30
KUKA机器人应用及系统概述
KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点 它可以是固定在工作空间的某一参考芯。
发表于 10-16 15:15
•9次下载
STM32CubeMX 窗口及工具介绍
STM32CubeMX 系列教程之 STM32CubeMX 窗口及 STM32PackCreator 工具介绍,内附详细图文介绍。
发表于 12-14 18:51
•27次下载


KUKA C4/C58.6以上系统的工具/基坐标管理窗口
采用 XYZ 参考法时,首先使用已知的工具移向一个参考点,然后使用待测工具移向参考点。机器人控制器比较法兰位置,并计算出新工具的 TCP。
发表于 01-31 12:22
•1082次阅读






 工商网监
工商网监
评论