 苹果手表被曝将移除血氧传感器技术以规避美国销售禁令,消息称SK海力士无锡工厂升级第四代DRAM
苹果手表被曝将移除血氧传感器技术以规避美国销售禁令,消息称SK海力士无锡工厂升级第四代DRAM

【华中科技大学:研发自粘附压力传感器,用于水下目标探测】
水下目标探测是海洋技术领域的一个重要课题,涵盖科学研究(例如海洋生物学和环境监测)、工业(例如对采矿和油田开采作业进行水下监视)和军事(例如威胁检测)等多个场景。例如,通过监测特定水域中海洋生物发出的信号,可以对种群进行分类,识别外来物种,保护区域生态系统的平衡。然而,介质衰减、信号干扰以及不同的水域环境等影响使得非接触水下目标探测面临巨大的挑战。
本研究制备了一种可用于水下目标探测的自粘附压力传感器,其由混合构型碳纳米管阵列制备而成,包括阵列和非阵列两个部分。由于阵列部分在压力作用下致密的管间接触,其可实现水下18 mPa的微弱压力信号检测,在18 mPa-178 mPa压力探测范围内保持99.82%的线性度。此外,非阵列部分表现出23.24 N/cm2的剪切粘附强度,使得传感器可以在运行速度为10公里/小时的载体上保持稳定。结合人工神经网络,该传感器可以对不同的水下目标进行识别,为非接触式压力检测和水下目标识别提供了新的可能。
水下目标探测可以分为主动探测(发射主动信号并接收反射信号)和被动探测(探测目标产生的信号)两种。主动探测具有成像分辨率高、噪声干扰低等优点,但该方法需要大功率信号源来发射信号,加重了供电系统的负担,并且增加了暴露的风险。相对而言,被动探测更加隐蔽,功耗低且可大范围铺设,是一种理想的隐蔽式探测方案。然而,被动式水下非接触式压力探测的研究仍相对少见。
本研究成功制备了一种具有超低检测下限的自粘附压力传感器,为水下目标的非接触式远距离探测提供了重要解决方案。其基于混合构型碳纳米管制备而成,在有离子存在的液体环境中,碳纳米管表面会吸附离子形成双电层,在压力作用下,碳纳米管发生弯曲变形,管与管之间发生接触,所吸附的离子发生迁移,产生电势变化,从而实现目标的探测。
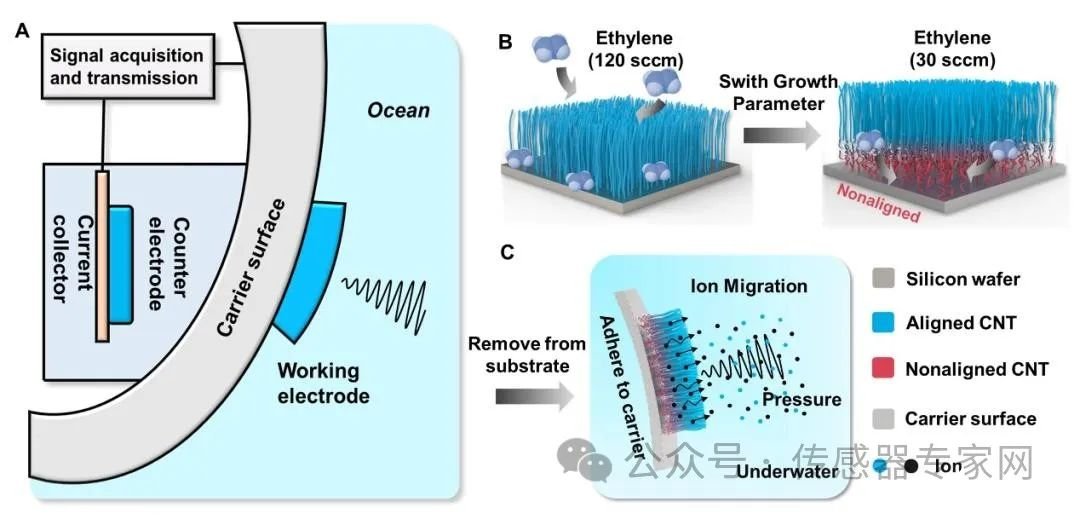
图1. 自粘附水下压力传感器件的结构及制备。(A)自粘附压力传感器的结构。(B)混合构型碳纳米管的制备。(C)自粘附压力传感器的工作机理。
相较于单一构型的阵列碳纳米管和非阵列碳纳米管,混合构型碳纳米管结合了阵列碳纳米管在传感性能方面和非阵列碳纳米管在粘附方面的优势。并且,由于混合构型碳纳米管中非阵列部分的弹性模量低于阵列部分的弹性模量,在施加预压力将自粘附压力传感器粘附在基底的过程中,非阵列部分先发生变形,与载体形成牢固的贴合。而阵列部分由于弹性模量较高,其在预压力作用下仍然保持了高度的取向结构,为传感器在压力作用下致密的管间接触提供了保障,从而获得更高的压力输出响应。
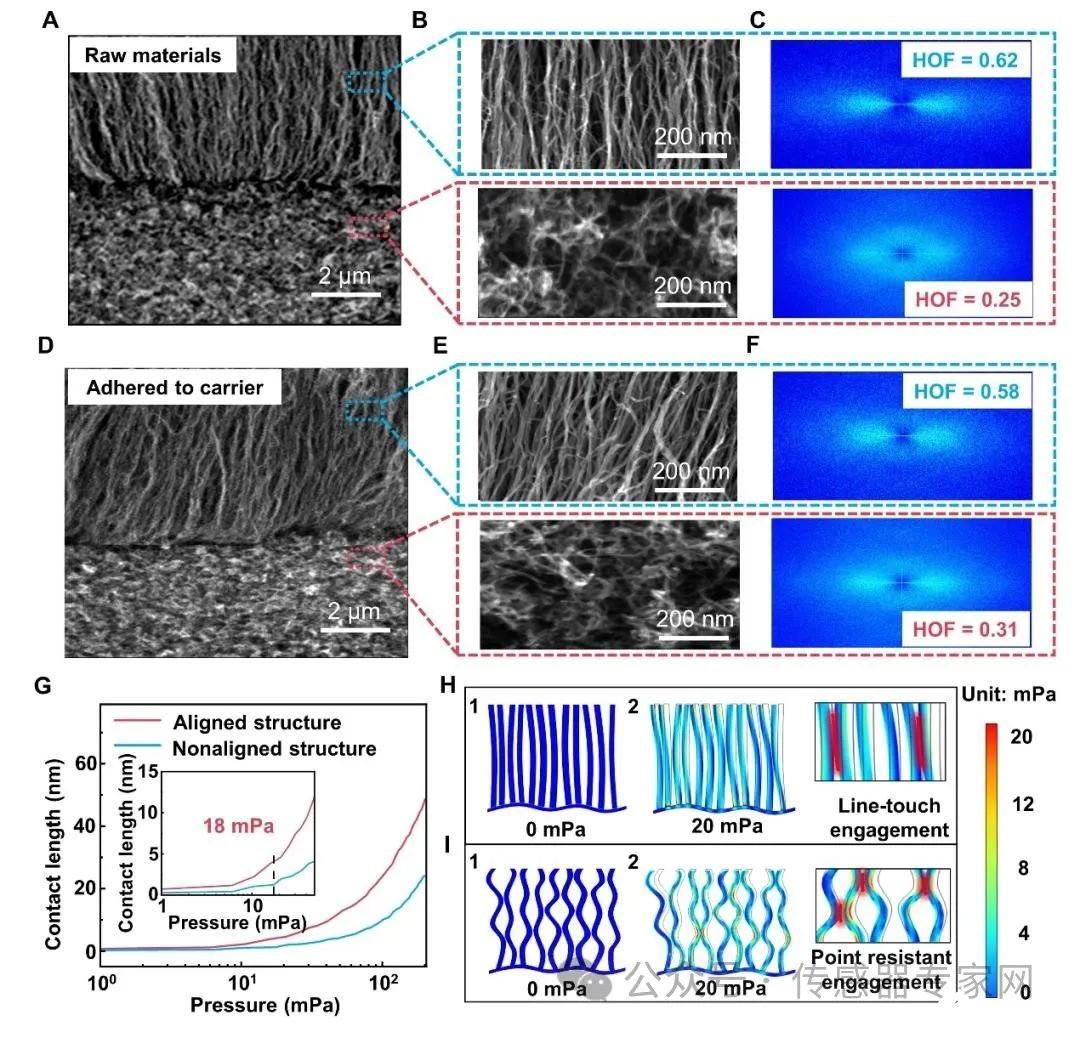
图2. 自粘附传感的工作机制。(A-B)混合构型碳纳米管粘附之前的扫描电子显微镜图像。(C)基于混合构型碳纳米管粘附之前扫描电子显微镜图像的快速傅里叶变换。(D-E)混合构型碳纳米管粘附之后的扫描电子显微镜图像。(F)基于混合构型碳纳米管粘附之后扫描电子显微镜图像的快速傅里叶变换。(G)阵列结构和非阵列结构压力作用下接触长度的趋势对比。(H)阵列结构在压力作用下的变形。(I)非阵列结构在压力作用下的变形。
结果分析
基于混合构型碳纳米管制备的自粘附水下压力传感器的剪切粘附强度达到23.24 N/cm2,法向粘附强度达到5.05N/cm2,经过28天水下浸泡后,其粘附强度保持率仍然在80%以上,并且可以实现在石英、不锈钢、亚克力、玻璃和铜基底上的粘附。
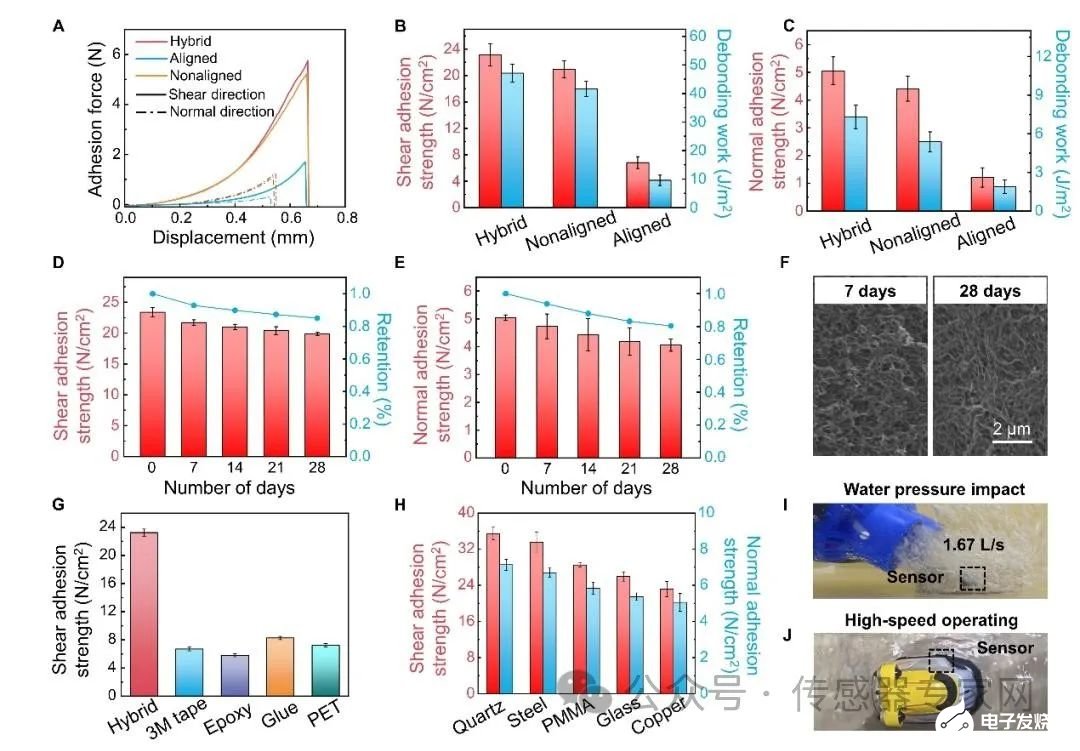
图3. 自粘附水下压力传感器的粘附性能。(A)基于混合构型碳纳米管、阵列碳纳米管、非阵列碳纳米管的自粘附水下压力传感器的剪切粘附强度和法向粘附强度。(B)三种自粘附水下压力传感器的剪切粘附力和剪切脱附功。(C)三种自粘附水下压力传感器的法向粘附力和法向脱附功。(D)基于混合构型碳纳米管的自粘附水下压力传感器的剪切粘附强度随时间的变化。(E)基于混合构型碳纳米管的自粘附水下压力传感器的法向粘附强度随时间的变化。(F)混合构型碳纳米管粘附在载体上浸泡在0.6 mol/L NaCl溶液中7天和28天的扫描电子显微镜图像。(G)剪切粘附强度与商用粘附材料性能对比。(H)混合构型碳纳米管在不同基底上的剪切粘附强度和法向粘附强度对比。(I)水压冲击测试。(J)高速运行测试。
得益于混合构型碳纳米管中阵列部分对于压力的高灵敏响应,其可实现18 mPa-178 mPa范围内微弱压力信号的响应,在40m水深范围内可保持性能稳定。结合其1-10Hz范围内的频率稳定性和在垂直方向的指向性,通过组建传感器网络,其可实现水下不同目标的识别和所在位置的判断。
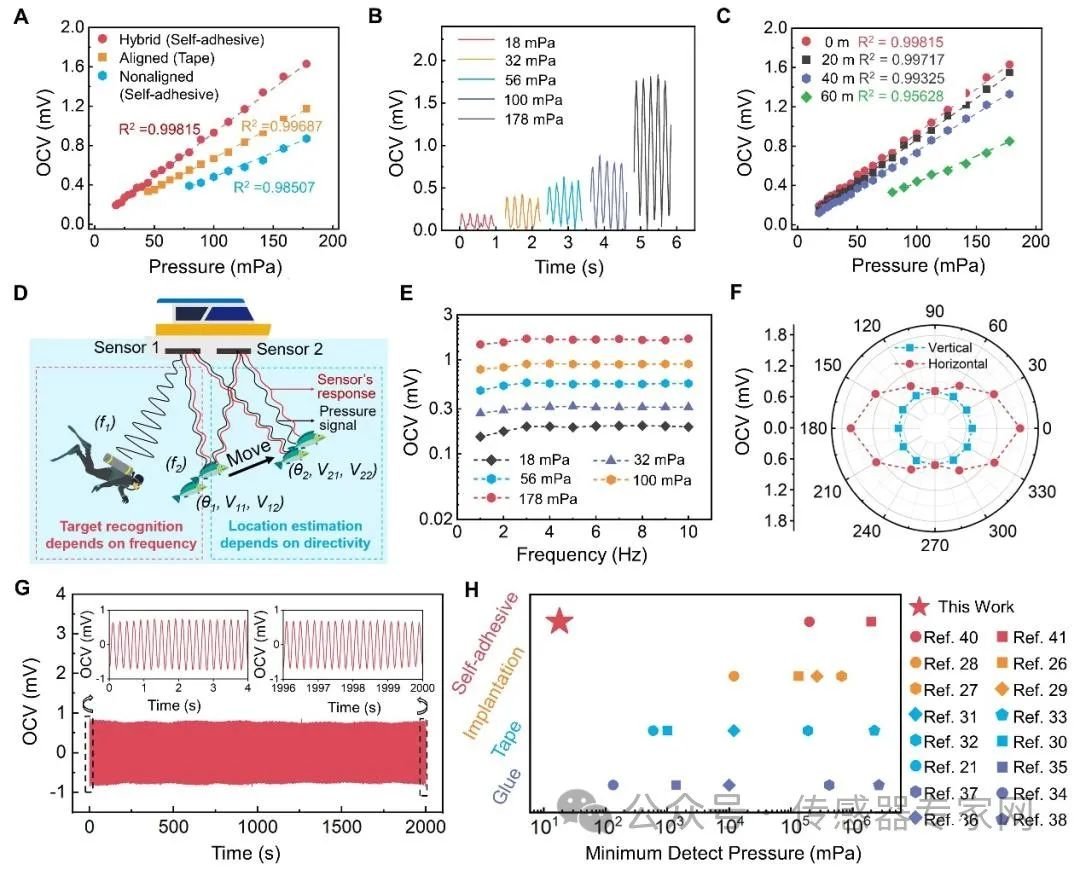
图4. 自粘附水下压力传感器的传感性能。(A)基于混合构型碳纳米管、阵列碳纳米管、非阵列碳纳米管的自粘附水下压力传感器对不同压力的响应。(B)混合构型碳纳米管自粘附水下压力传感器对18 mPa–178 mPa压力信号的实时响应。(C)自粘附水下压力传感器在不同水深下的压力响应曲线。(D)基于传感器网络的目标识别与位置判断示意图。(E)自粘附水下压力传感器对于不同频率、不同压力的输出响应。(F)自粘附水下压力传感器的指向性。(G)循环性能测试。(H)与已报道研究的性能对比。
结合人工智能神经网络,自粘附水下压力传感器可以实现对不同目标的识别。通过采集不同目标产生的信号,根据不同目标产生的信号在传输过程中频率不会变化这一特点,依据其特征频率的不同,自粘附水下压力传感器可以实现对不同目标的识别。
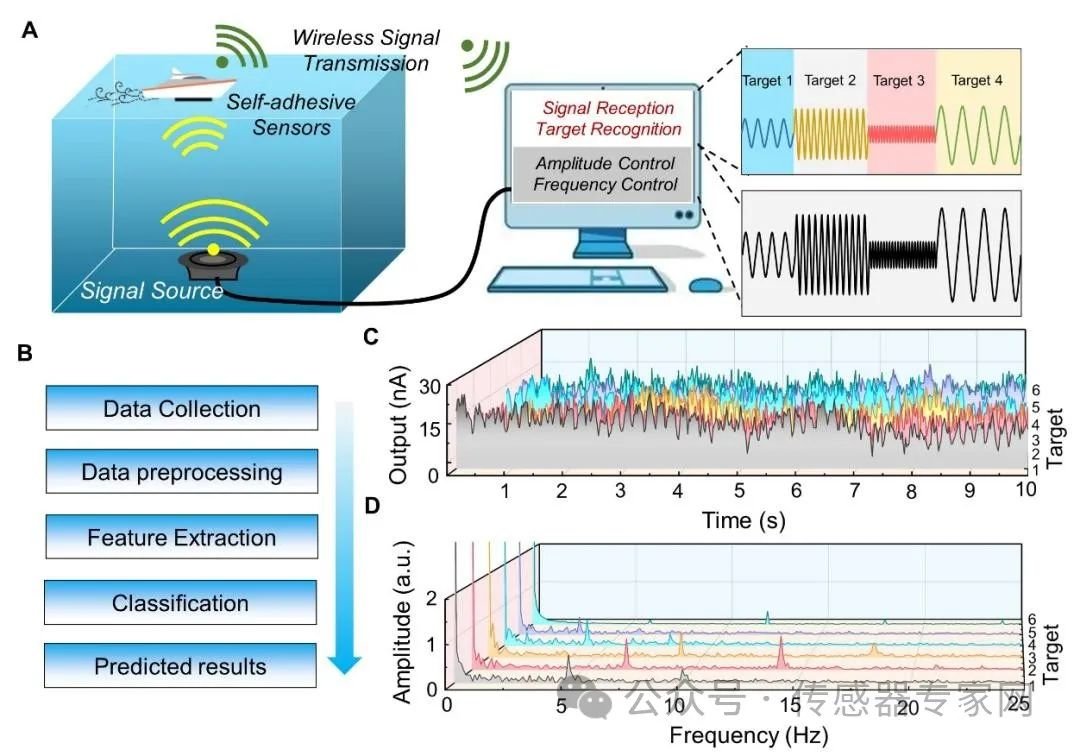
图5.自粘附水下压力传感器的应用场景。(A)自粘附水下压力传感器用于水下目标识别。(B)通过机器学习实现目标识别过程。(C)不同目标产生的实时信号。(D)基于不同目标产生的实时信号的傅里叶变化图。
总之,本研究开发了一种自粘附水下压力传感器,实现了对水下目标的非接触检测。混合构型碳纳米管的独特结构设计有效地解决了传感和粘合功能之间的权衡,从而实现了安全的固定和18 mPa的超低检测下限。此外,由于阵列部分高度的取向性,该传感器表现出稳定的频率响应和垂直方向的指向性。并且其剪切粘结强度为23.24 N/cm2,可承受高达1.67 L/S的水压冲击和10 km/h的高速运行试验,在复杂的水下环境中表现出良好的稳定性。通过与人工神经网络相结合,其还可实现对不同模拟水下目标的移动识别,为非接触式、远距离水下目标探测提供了新的可能。
传感动态
【苹果手表被曝将移除血氧传感器技术,以规避美国销售禁令】
为避免苹果手表在美销售禁令再次生效,苹果(Nasdaq:AAPL)计划移除旗下最新两款智能手表Apple Watch Ultra 2和Apple Watch Series 9的血氧传感器技术。
当地时间1月15日,据医疗技术公司麦斯莫医疗(Masimo)透露,苹果已经获得美国海关边境保护局(CBP)的批准,或将对于面临禁售风险的苹果手表进行重新设计,使其不再包含血氧检测功能,麦斯莫医疗在血氧传感器技术上与苹果有长期专利纠纷。
此前,苹果在对美国国际贸易委员会(ITC)发布的销售禁令上诉时表示,对于该禁令所涉及的两款智能手表型号,公司已向CBP提交了经过重新设计的版本。CBP负责执行进口禁令,将确定经过重新设计的苹果手表是否依然侵犯麦斯莫医疗的专利。
根据麦斯莫医疗15日提交的一份文件显示,CBP已于12日批准了对苹果手表相关型号的技术修改,其中包括去除血氧传感器。麦斯莫医疗方面的律师向外媒确认,只要去除血氧监测功能,美国政府对于苹果手表的进口就不会有反对意见。
麦斯莫医疗当日发布的一份声明表示:“苹果称其重新设计的手表不包含血氧测量功能,这是该公司向承担责任迈出的积极一步。”
法院将在未来几天内对苹果此前提交的动议给出结果,决定是否在苹果上诉期间暂停执行ITC的销售禁令。苹果的一位发言人对外媒表示,目前,两款手表将继续提供血氧功能。如果法院没有批准暂缓执行禁令,苹果将去掉手表中的血氧检测功能。苹果方面预计,整个上诉过程将持续一年或更长时间。
据外媒分析,血氧检测功能是苹果手表相关型号的最大卖点之一,移除该功能可能会削弱消费者需求。有消息称苹果正在准备一个软件更新来调整其血氧检测功能的算法,试图避开麦斯莫医疗的专利技术,不知是否能赶在销售禁令重启前推出。而知名苹果爆料记者马克·古尔曼(Mark Gurman)表示,苹果已经开始向美国零售店运送新的“改良”版苹果手表。
苹果和麦斯莫医疗之间这场围绕血氧传感器展开的专利风波已经持续数年,近日更是反转不断。
2023年12月26日,在度过美国政府为期60天的总统审查期后,ITC发布的苹果手表在美销售禁令正式生效,有血氧传感器技术的Apple Watch Ultra 2和Apple Watch Series 9将在美国停止销售。
当日,苹果宣布就ITC的判决提起上诉,并向美国联邦巡回上诉法院请求紧急限制令,称ITC的决定是错误的,公司将遭受“无法弥补的伤害”。美国联邦巡回上诉法院于第二日宣布暂停实施该销售禁令。
今年1月10日,ITC又向美国联邦巡回上诉法院提交了诉讼文件,正式反对苹果此前提出的、在整个上诉期间暂停该销售禁令的动议。
受本次销售禁令影响的Apple Watch Series 9和Apple Watch Ultra 2发布于2023年9月,是目前苹果手表的主力机型,售价分别为399美元和799美元起步。虽然苹果手表在公司总营收中所占比例较小,但该产品在苹果不断扩大健康业务的计划中扮演着重要的角色。
【总投资15亿元,芯智达电子MEMS高性能压力传感器项目、碳华新材项目落地安徽蚌埠】
据传感器专家网了解,近日安徽蚌埠市龙子湖区政府与安徽芯智达电子科技有限公司、深圳碳华新材料科技有限公司项目签约仪式举行。

龙子湖区人民政府发布消息显示,此次签约的芯智达电子科技MEMS高性能压力传感器项目、碳华新材料科技复合型芯片用热管理材料项目总投资共15亿元。其中,芯智达电子科技MEMS高性能压力传感器项目达产后可形成年产1200万只高性能MEMS压力传感器的产能。碳华新材料科技复合型芯片用热管理材料项目,将生产各类高强度、超大存储热量的复合型芯片用热管理材料,应用于电子显示、数码3C、智能座舱等各类智能电子设备。
安徽省科技厅信息显示,截至2023年10月底,蚌埠市智能传感产业规上企业达39家,完成产值41.7亿元,实现营业收入55.1亿元;新签约亿元以上项目34个、协议总投资92亿元,已开工项目7个、总投资额12亿元,已投产项目6个、总投资额22.1亿元。
【成功成像!中国电科11所低成本红外探测器驶入商业航天应用“快车道”】
近日,中国电科11所研发的低成本红外探测器搭载“星池一号”第二组A/B星发射升空,成功开机拍摄红外影像。

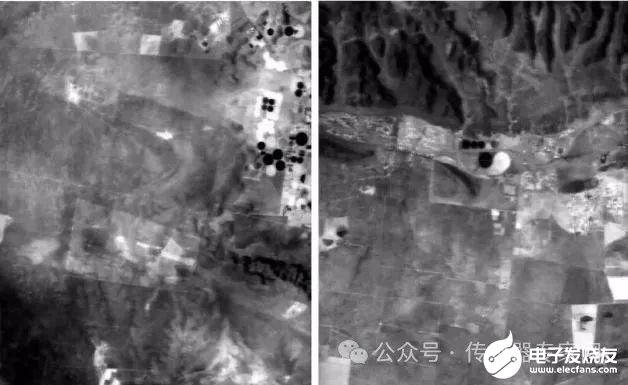
图:“星池一号”第二组A/B星红外成像影像
近年来,我国遥感卫星尤其是商业遥感卫星步入发展“快车道”。遥感好像听起来很神秘,其实就是“眼睛”的延长。把“眼睛”放到太阳同步轨道,通过观察地面的情况,辅助农业发展、灾害治理、城市管理等。这其中,很重要的一双“眼睛”就是红外探测器,它采用焦平面阵列技术,集成数万个乃至数十万个信号放大器,构建热力“视网膜”,把红外“热信号”转换成电信号,并进行积分、存储、放大、输出,从而取得探测目标“热量”全景图。
抢抓商业遥感卫星发展机遇,中国电科11所加大低成本红外探测器技术创新力度,研发高性能、低功耗、低噪声、大动态范围、轻小型探测器模组,进一步降低成本,形成特有多系列“拳头”产品,为后续规模化应用于商业航天遥感探测奠定了坚实基础。
【消息称 SK 海力士无锡工厂升级第四代 DRAM】
1 月 16 日消息,根据韩媒《首尔经济日报》报道,SK 海力士计划在 2024 年之前,完成对无锡 C2 工厂的改造,转换升级为第四代(1a)D-ram 工艺,该工艺达到 10nm 级别。
无锡工厂是该公司的核心生产基地,约占 SK hynix D-RAM 总产量的 40%。该厂目前生产 10 纳米后期级别的第二代(1y)和第三代(1z)D-RAM,属于旧(传统)产品线。
消息称 SK 海力士会在无锡工厂完成第四代 D-RAM 的部分工艺,然后把晶圆运到韩国总部利川园区内,使用 EUV 加工之后再返回送到无锡工厂。
由于第四代产品只有一个 D-RAM 层需要采用 EUV 工艺,该公司显然认为成本增加是值得的。
在 2013 年无锡工厂大火期间,该公司克服了 D-RAM 生产中断的困难,因此在这种方法上也积累了丰富的经验。
关于无锡工厂的工艺转型,SK 海力士表示无法确认该公司具体的工厂运营计划。
陀螺仪,又叫角速度传感器,是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,同时,利用其他原理制成的角运动检测装置起同样功能的装置也称陀螺仪。
陀螺仪的名字由来
陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字 gyro(旋转)和skopein(看)两字合为“gyro scopei ”一字来命名该仪器仪表。
最早的陀螺仪的简易制作方式如下:即将一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度,简易图如下图所示。
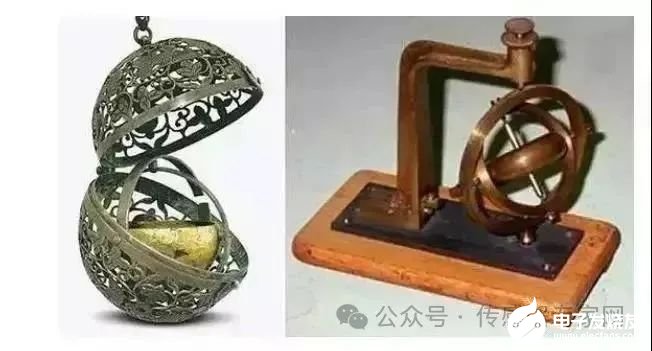
其中,中间金色的转子即为陀螺,它因为惯性作用是不会受到影响的,周边的三个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。因此一开始,陀螺仪的最主要的作用在于可以测量角速度。
陀螺仪的基本组成
当前,从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动,更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。

陀螺仪的基本部件有:陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);附件(是指力矩马达、信号传感器等)。
陀螺仪的工作原理
陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,物体会感受到一个垂直的力和垂直方向的加速度。
台风的形成就是基于这个原理,地球转动带动大气转动,如果大气转动时受到一个切向力,便容易形成台风,而北半球和南半球台风转动的方向是不一样的。用一个形象的比喻解释了科里奥利力的原理。
陀螺仪的两大动力特性
陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的定轴性(inertia or rigidity)和进动性(precession),这两种特性都是建立在角动量守恒的原则下。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的定轴性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。
定轴性(inertia or rigidity)。当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:转子的转动惯量愈大,稳定性愈好;转子角速度愈大,稳定性愈好。
进动性(precession)。当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直,这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55756浏览量
795038 -
芯片
+关注
关注
463文章
54593浏览量
470594 -
DRAM
+关注
关注
41文章
2406浏览量
189713 -
mems
+关注
关注
129文章
4545浏览量
199839 -
SK海力士
+关注
关注
0文章
1017浏览量
41998
发布评论请先 登录
SK海力士投资19万亿韩元在韩国建设先进封装厂
LoRa2021 模块 FCC 认证与 CE 认证通过,搭载 Semtech 第四代 LoRa 芯片

Wolfspeed最新推出TOLT封装650V第四代MOSFET产品组合
实测 3 秒响应!布里渊第四代 DTS:32 通道覆盖军工项目,0.1 米定位

小马智行与三一重卡及东风柳汽联合打造第四代自动驾驶卡车
SK海力士HBS存储技术,基于垂直导线扇出VFO封装工艺

Melexis推出第四代汽车LIN电机驱动器MLX81350
派恩杰第四代碳化硅产品在AI基建的应用
Wolfspeed推出第四代高性能碳化硅MOSFET
派恩杰发布第四代SiC MOSFET系列产品




评论