 一文探秘MEMS陀螺仪工作原理与特性
一文探秘MEMS陀螺仪工作原理与特性

陀螺仪,又叫角速度传感器,是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,同时,利用其他原理制成的角运动检测装置起同样功能的装置也称陀螺仪。
陀螺仪的名字由来
陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字 gyro(旋转)和skopein(看)两字合为“gyro scopei ”一字来命名该仪器仪表。
最早的陀螺仪的简易制作方式如下:即将一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度,简易图如下图所示。
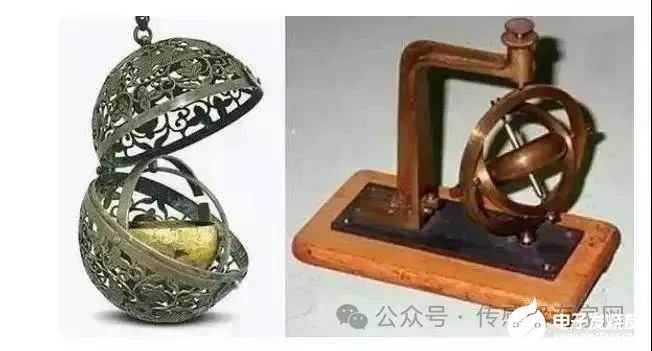
其中,中间金色的转子即为陀螺,它因为惯性作用是不会受到影响的,周边的三个“钢圈”则会因为设备的改变姿态而跟着改变,通过这样来检测设备当前的状态,而这三个“钢圈”所在的轴,也就是三轴陀螺仪里面的“三轴”,即X轴、y轴、Z轴,三个轴围成的立体空间联合检测各种动作,然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。因此一开始,陀螺仪的最主要的作用在于可以测量角速度。
陀螺仪的基本组成
当前,从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动,更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。

陀螺仪的基本部件有:陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);附件(是指力矩马达、信号传感器等)。
陀螺仪的工作原理
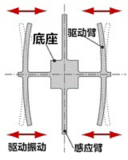
陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,物体会感受到一个垂直的力和垂直方向的加速度。
台风的形成就是基于这个原理,地球转动带动大气转动,如果大气转动时受到一个切向力,便容易形成台风,而北半球和南半球台风转动的方向是不一样的。用一个形象的比喻解释了科里奥利力的原理。
陀螺仪的两大动力特性
陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的定轴性(inertia or rigidity)和进动性(precession),这两种特性都是建立在角动量守恒的原则下。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的定轴性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。
定轴性(inertia or rigidity)。当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:转子的转动惯量愈大,稳定性愈好;转子角速度愈大,稳定性愈好。
进动性(precession)。当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直,这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。
审核编辑 黄宇
-
mems
+关注
关注
129文章
4547浏览量
199851 -
陀螺仪
+关注
关注
44文章
900浏览量
102190
发布评论请先 登录
面向MEMS陀螺仪自动化测试的数据采集方案

单轴MEMS陀螺仪:精准导航与稳定的核心

MEMS陀螺仪如何成为动态世界的“定盘星”?

首款商业航天专用MEMS陀螺仪流片成功

什么是光纤陀螺仪?陀螺仪有哪些作用?
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

MEMS陀螺仪如何实现高精度寻北?
这款经济型MEMS陀螺仪如何驱动智能化浪潮?
MEMS陀螺仪有哪些分类?
MEMS陀螺仪正在取代光纤陀螺仪?
MEMS 陀螺仪如何塑造精准控制的世界?
振动陀螺仪传感器的工作原理
陀螺仪在钻井或测井中有何用途?

MEMS陀螺仪的寻北原理是什么?精度如何?

“MEMS陀螺仪”小到极致,稳如磐石!




评论