 PLC编程案例之控制机械手实现简单搬运流程
PLC编程案例之控制机械手实现简单搬运流程
很多人希望多分享一些PLC具体应用和维护的案例,满足大家的要求。今天咱们来谈一谈如何利用PLC来实现简单的搬运动作,让机械为人服务!
这个例子应用到了顺序控制的指令,实际操作起来真的是非常方便,程序循环控制也很流畅!
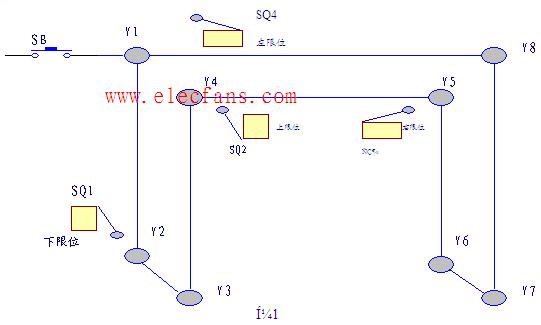
简易机械手结构图如图所示
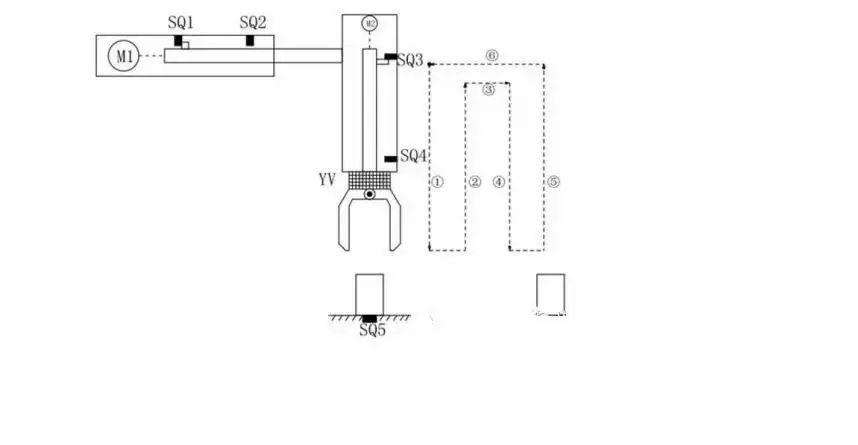
M1为控制机械手左右移动的电动机
M2为控制机械手上下升降的电动机
YV线圈用来控制机械手夹紧防松
SQ1为左到位检测开关
SQ2为右到位检测开关
SQ3为上到位检测开关
SQ4为下到位检测开关
SQ5为工件检测开关
简易机械手的控制要求如下:机械手要将工件从工位A移到工位B 处;
机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
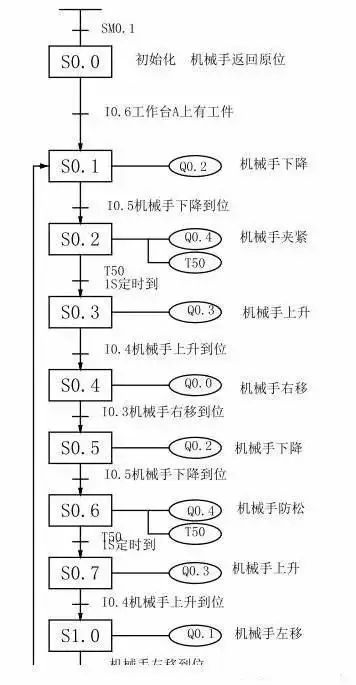
若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
动作图编程前理顺动作如何转移:
定义符号表:

硬件的接线图:
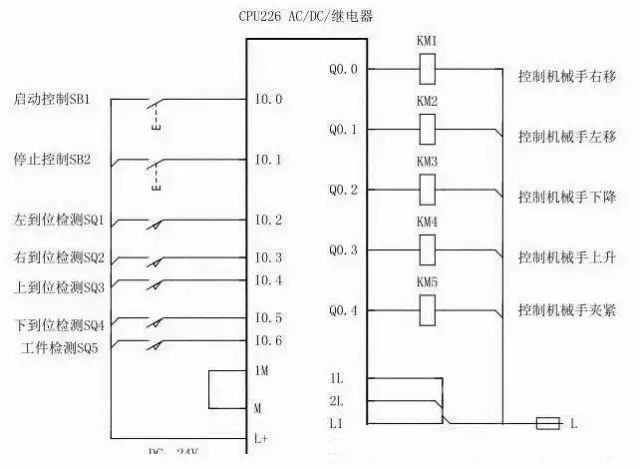
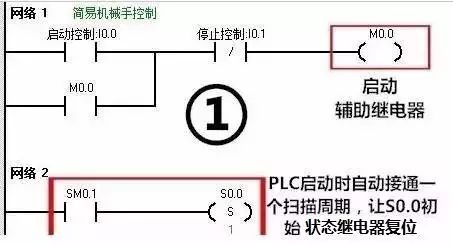
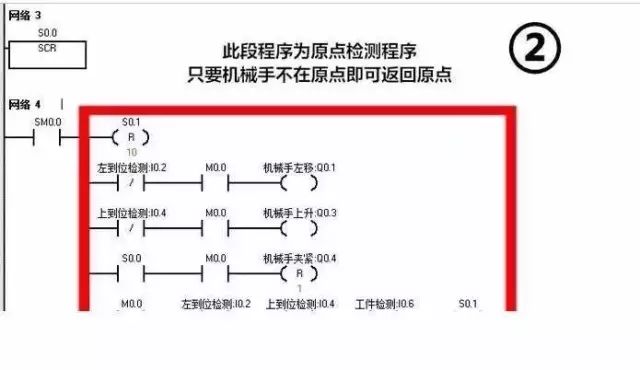
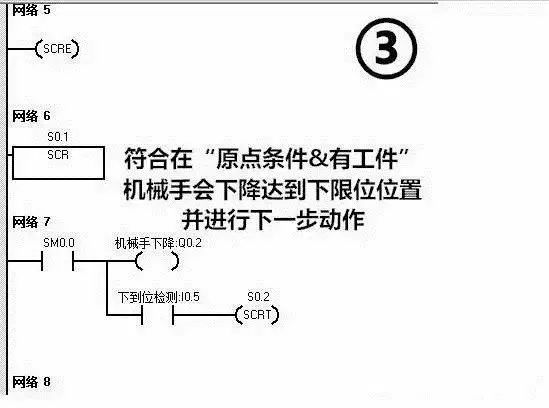
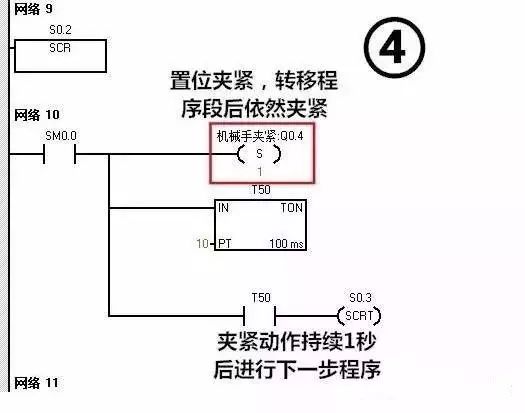
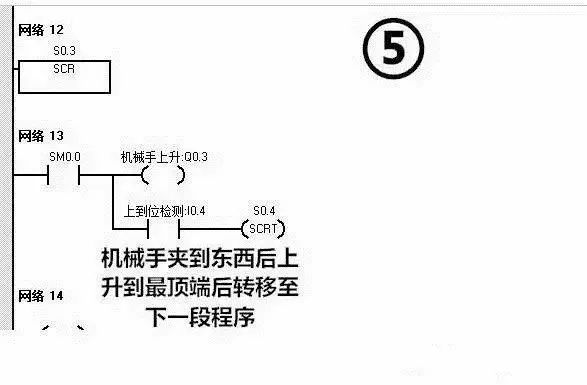
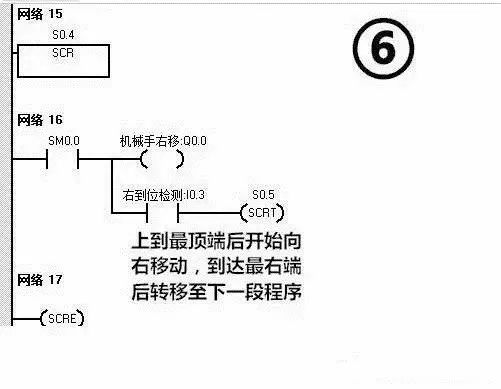
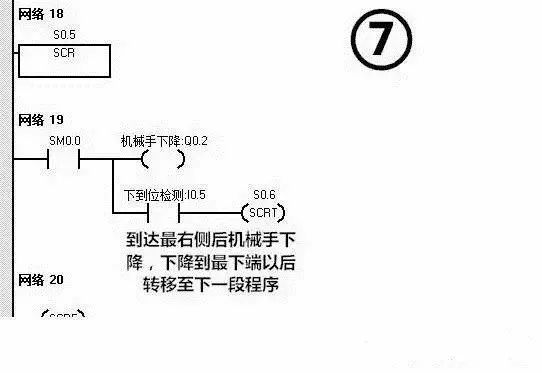
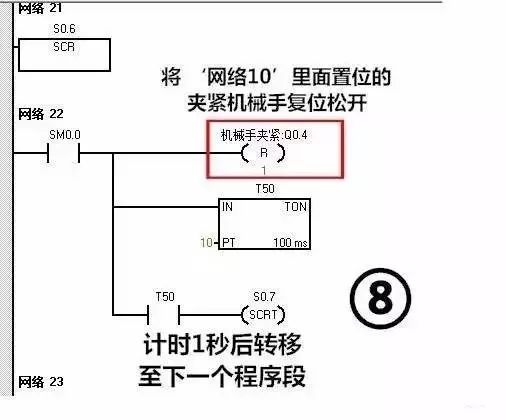
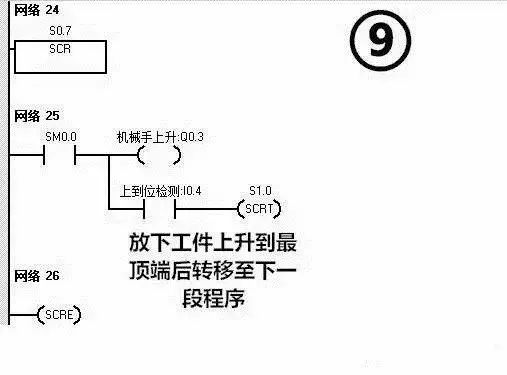
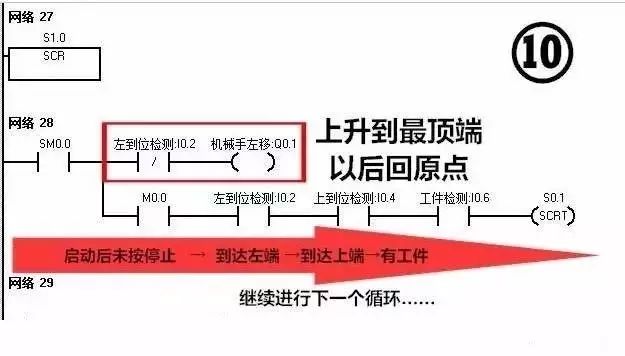
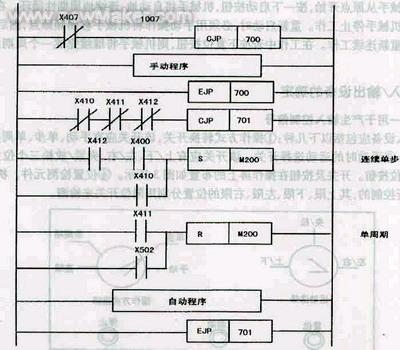
满足所有动作的程序如下:

这么多梯形图看着真是头晕目眩,接下来我们一段一段分析分析这个机械手是如何工作的,其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电动机
+关注
关注
74文章
4110浏览量
96289 -
PLC编程
+关注
关注
46文章
246浏览量
37448
原文标题:PLC编程案例之控制机械手实现简单搬运
文章出处:【微信号:中泰PLC自动化教学,微信公众号:中泰PLC自动化教学】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机械手 OEM 的应用
采用电动机作为驱动源,具有运动速度快、精度高、噪声低等优点。它可以通过编程实现复杂的运动控制,适用于一些对运动控制要求较高的应用场景,如电子制造、科研教育等。
液压
发表于 09-18 10:31
转:分享基于ATmega16的搬运机械手的设计与控制方案
项目介绍: 本项目基于液压控制的搬运机械手,其控制结构采用ATmega16 8位单片机,利用Proteus与Atmel Studio6.0软件进行控
发表于 08-04 13:43
使用桁架式机械手有哪些优势?
`力泰科技资讯:桁架式自动上下料机械手能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机。它能够搬运
发表于 11-25 15:24
基于 CAN 总线的机械手控制系统The Control S
基于现场总线的开放结构机械手控制系统是目前机械手控制的发展方向。文章通过对物料搬运机械手装置及其
发表于 06-03 09:10
•28次下载
基于PLC控制的注塑机专用机械手
基于PLC控制的注塑机专用机械手
目前,市场上流行的注塑机专用机械手就控制系统而言都是使用专用的微处理机加接口组成的最小
发表于 06-16 15:24
•2007次阅读
PLC在机械手控制系统上的应用
PLC在机械手控制系统上的应用
机械手在工业生产中得到广泛的应用,传统工艺中采用继电器控制时,需要的继电器多,接线复杂,因 此
发表于 06-17 13:35
•1w次阅读

基于PLC的机械手混合驱动控制
通过对物料搬运机械手装置结构与功能的介绍,提出了一种电气伺服和气动伺服相结合的混合驱动机械手结构类型,重点分析了基于45, 的机械手控制系统
发表于 08-15 17:49
•101次下载

PLC在机械手控制系统中的具体应用
随着工业自动化技术的飞速发展,机械手作为现代制造业中不可或缺的重要设备,其智能化、自动化水平不断提高。在机械手控制系统中,PLC(可编程逻辑





 工商网监
工商网监
评论