 自动驾驶领域的数据集汇总
自动驾驶领域的数据集汇总
来源:3D视觉工坊
1. 写在前面
发自动驾驶论文哪少的了数据集,今天笔者将为大家推荐一篇最新的综述,总结了200多个自动驾驶领域的数据集,大家堆工作量的时候也可以找一些小众的数据集刷榜~
下面一起来阅读一下这项工作
2. 摘要
近年来,随着硬件和深度学习方法的发展,自动驾驶技术得到了快速发展,并表现出良好的性能。高质量的数据集是开发可靠的自动驾驶算法的基础。以前的数据集调查试图审查数据集,但要么集中在有限的数量上,要么缺乏对数据集特征的详细调查。为此,我们从多个角度对超过200个自动驾驶数据集进行了详尽的研究,包括传感器模态、数据大小、任务和上下文条件。我们引入了一个新的度量来评估每个数据集的影响,这也可以作为建立新数据集的指南。我们进一步分析了数据集的标注过程和标注质量。此外,我们对几个重要数据集的数据分布进行了深入分析。最后,讨论了未来自动驾驶数据集的发展趋势。
3. 和其他综述的对比
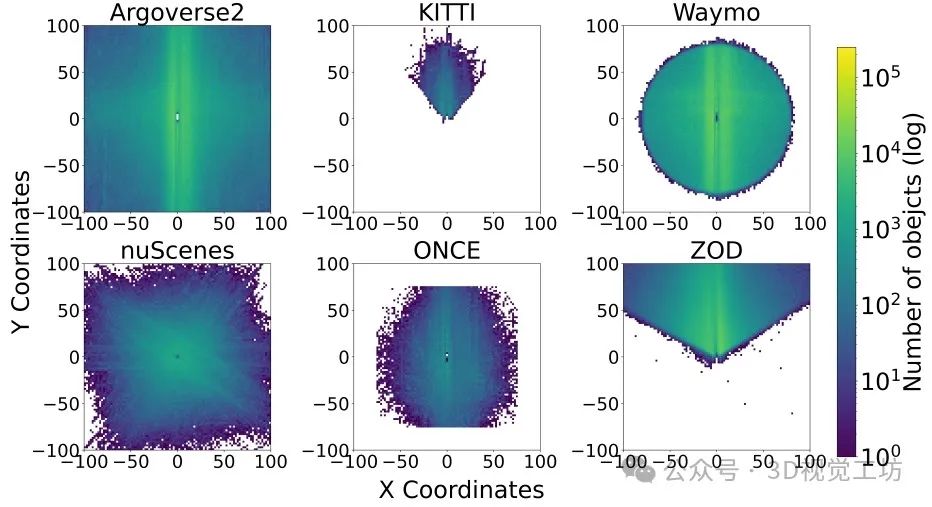
先看一下主流数据集的BEV对象分布。每个热力图对应一个以X和Y坐标绘制的数据集,Y是自车的行驶方向。每个数据集特有的标注特征体现在边界框的分布范围、密度和数量上。
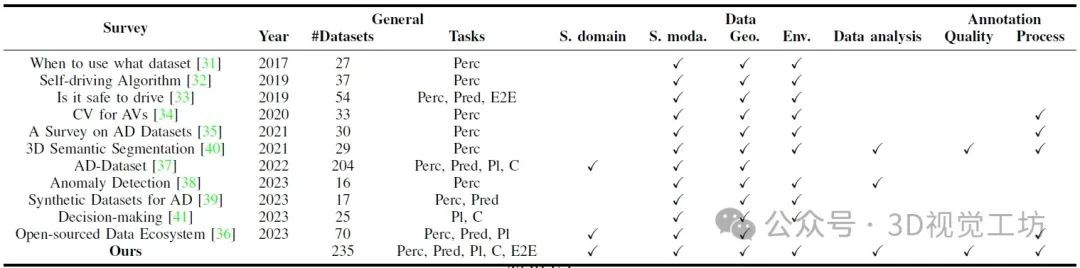
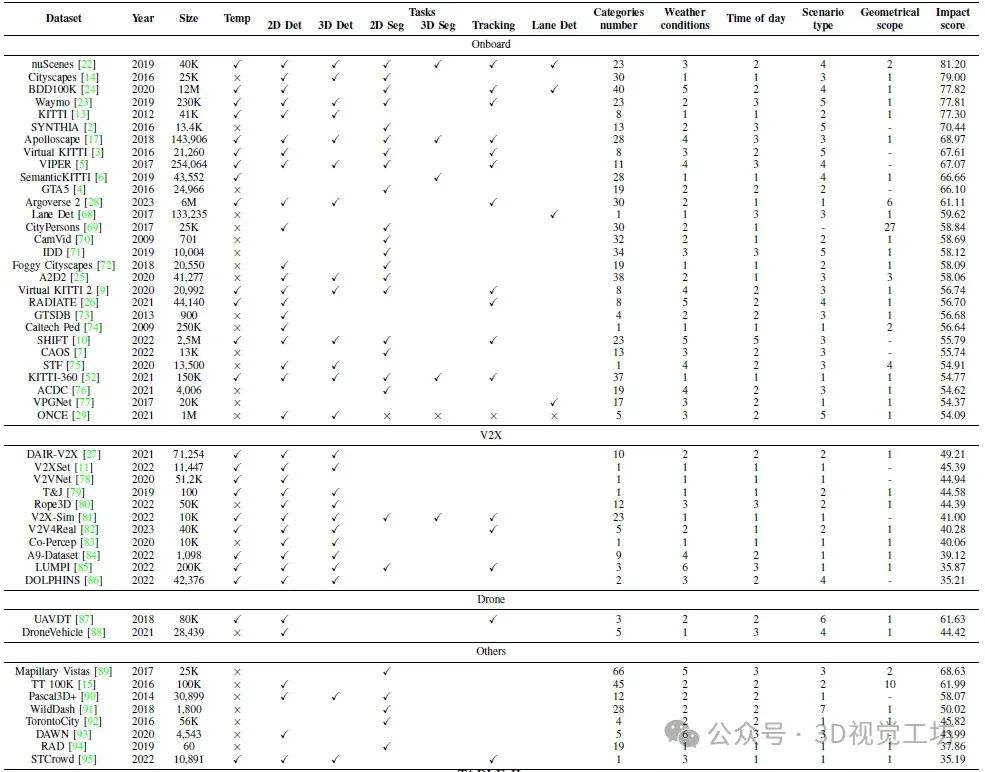
和其他数据集综述的对比:包括收集的数据集数量(Dataset )、相关任务(Tasks)、传感域( S.domain )、传感器模态( S.Moda . )、几何条件( Geo . )、环境条件( Env . )、数据分布(Data Analysis)、标注质量和过程。任务类型用粗粒度来描述,包括感知( Perc . )、预测( Pred . )、规划( PL . )、控制( C . )、端到端 ( E2E )。
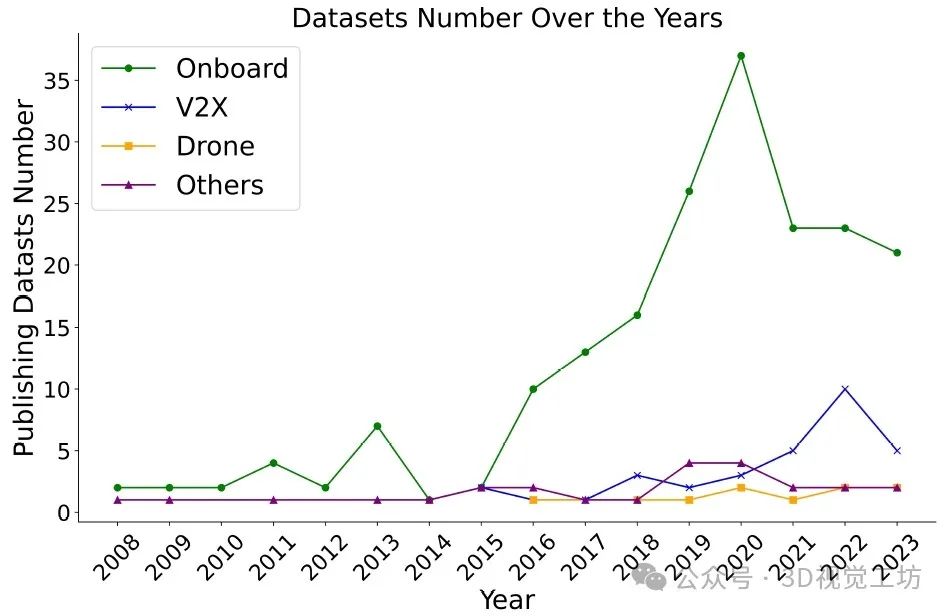
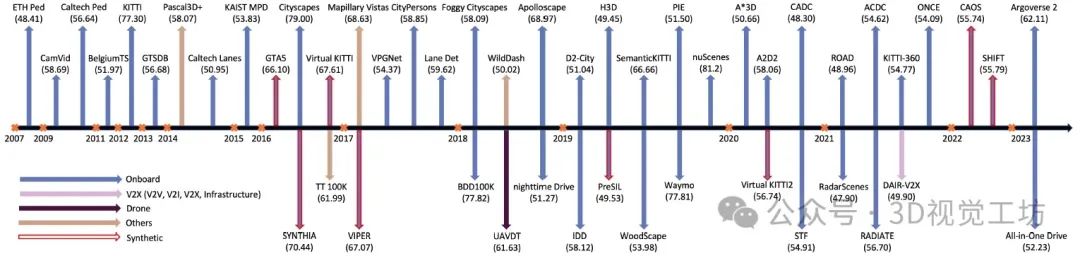
总结了自动驾驶数据集发布的趋势。自动驾驶数据集在2015年至2020快速增长,然后缓慢下降。相比之下,V2X数据集有增加的趋势,显示了协作感知系统的研究趋势。
4. 文章结构
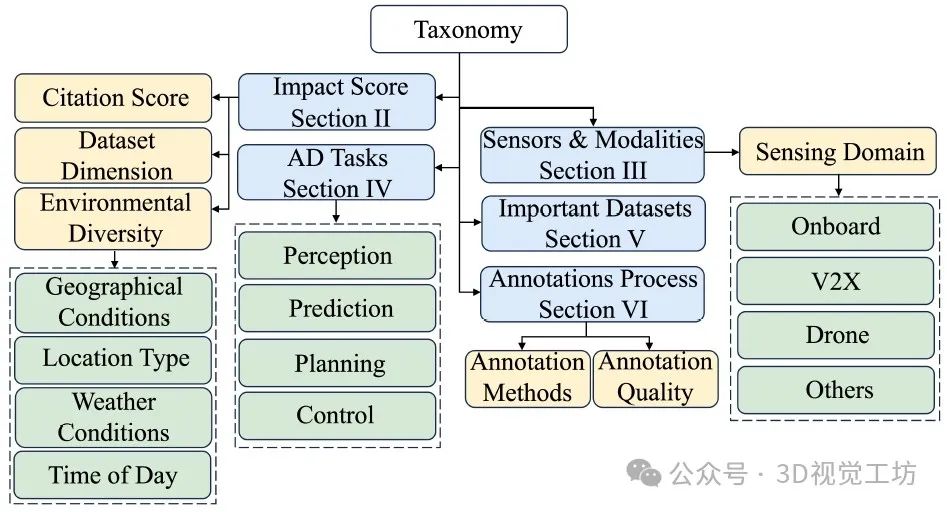
这篇综述主要分类包括影响评分、传感器和模态、自动驾驶任务、重要数据集和标注过程。
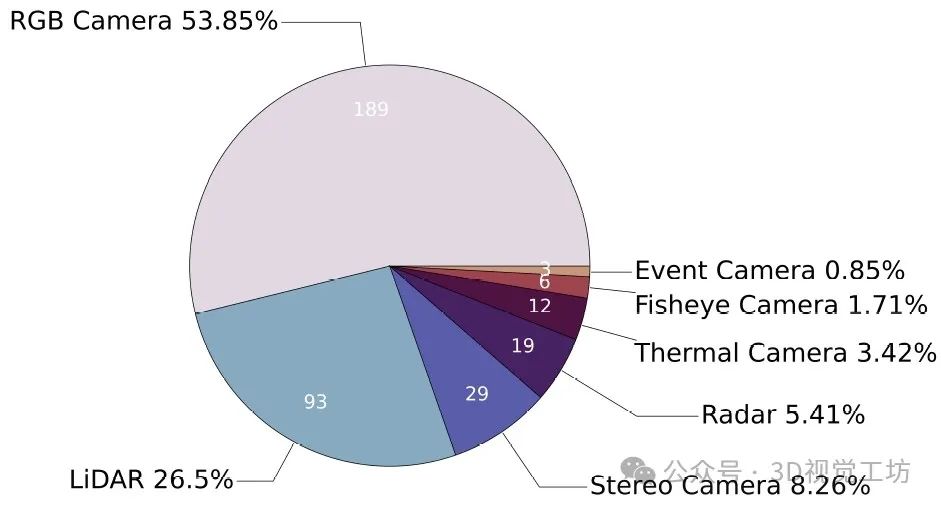
自动驾驶任务中使用传感器的模态总结。
传感器数量分布,RGB相机和激光雷达是自动驾驶数据集中使用最多的传感器。
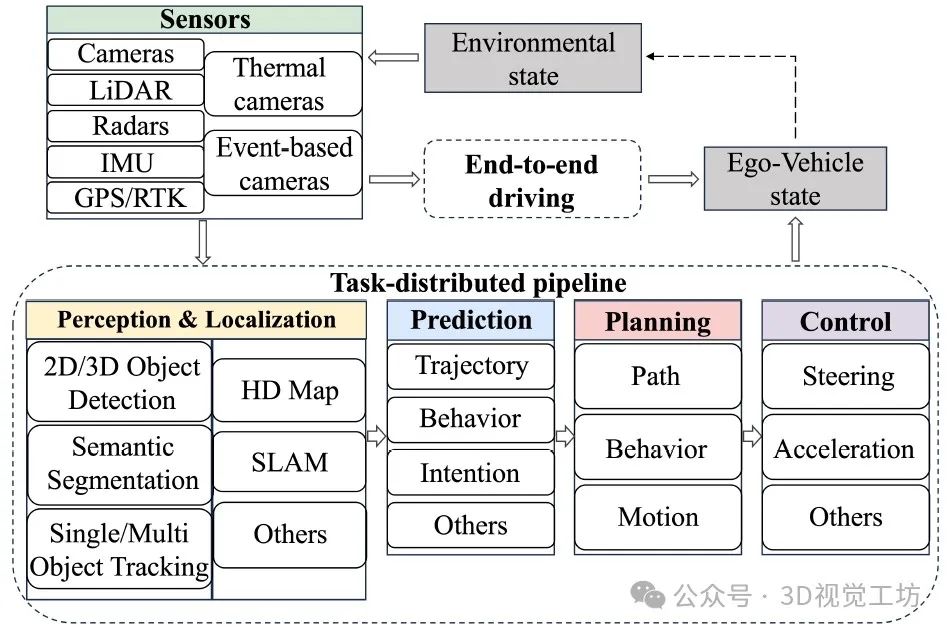
自动驾驶pipeline总结:自动驾驶系统可以分为两种类型:基于模块的和端到端的。
自动驾驶任务的总结。
2007年到2023年的数据集发布的时间线。
高影响感知数据集的总结。
5. 总结
这篇文章对200多个现有的自动驾驶数据集进行了全面系统的回顾和分析。从与自动驾驶数据集相关的传感器类型和模态、感知域和任务入手。为了验证感知数据集的影响力和重要性,引入了一个新的评价指标- -影响评分。之后展示了几个涉及感知、预测、规划、控制和端到端自动驾驶的高影响力数据集。还对自动驾驶数据集的标注方法进行了说明,并对影响标注质量的因素进行了研究。
审核编辑:汤梓红
-
数据集
+关注
关注
4文章
1208浏览量
24688 -
自动驾驶
+关注
关注
784文章
13784浏览量
166375 -
深度学习
+关注
关注
73文章
5500浏览量
121109
原文标题:200+自动驾驶数据集汇总!
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论