 项目工程下载与XML配置文件下载:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十)
项目工程下载与XML配置文件下载:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十)
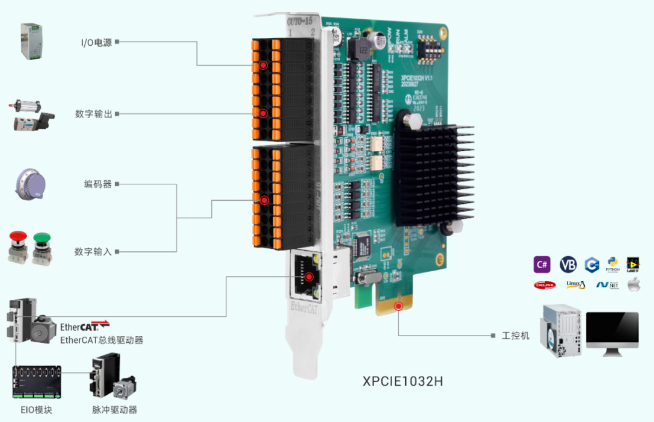
XPCIE1032H功能简介
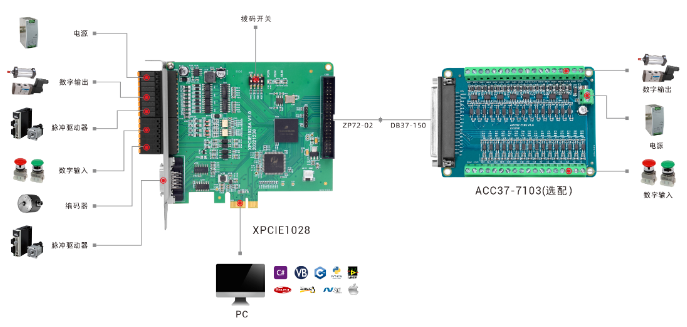
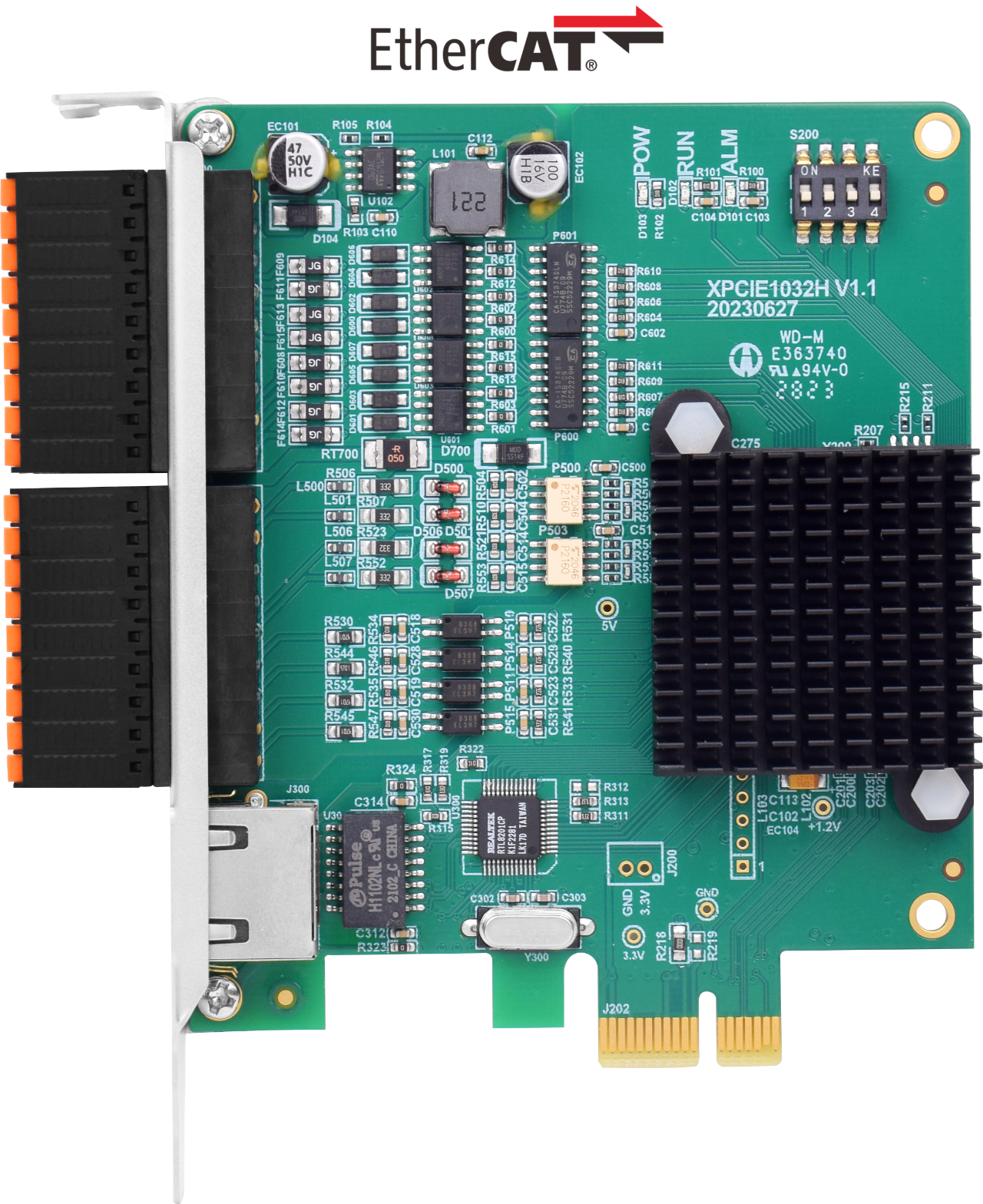
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动控制实时软核,解决了高速高精应用中,PC Windows开发的非实时痛点,指令交互速度比传统的PCI/PCIe快10倍。

XPCIE1032H支持PWM,PSO功能,板载16进16出通用IO口,其中输出口全部为高速输出口,可配置为4路PWM输出口或者16路高速PSO硬件比较输出口。输入口含有8路高速输入口,可配置为4路高速色标锁存或两路编码器输入。
XPCIE1032H搭配MotionRT7实时内核,使用本地LOCAL接口连接,通过高速的核内交互,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间可以达到3-5us左右。
➜XPCIE1032H与MotionRT7实时内核的配合具有以下优势:
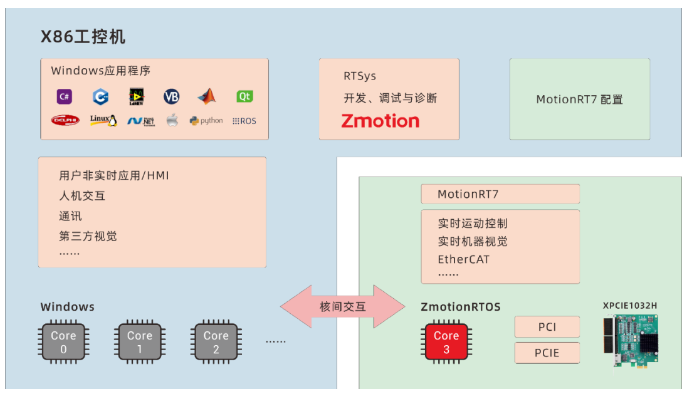
1.支持多种上位机语言开发,所有系列产品均可调用同一套API函数库;
2.借助核内交互,可以快速调用运动指令,响应时间快至微秒级,比传统PCI/PCIe快10倍;
3.解决传统PCI/PCIe运动控制卡在Windows环境下控制系统的非实时性问题;
4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量控制等应用;
5.提供高速输入接口,便于实现位置锁存;
6.支持EtherCAT总线和脉冲输出混合联动、混合插补。

➜使用XPCIE1032H和MotionRT7进行项目开发时,通常需要进行以下步骤:
1.安装驱动程序,识别XPCIE1032H;
2.打开并执行文件“MotionRT710.exe”,配置参数和运行运动控制实时内核;
3.使用ZDevelop软件连接到控制器,进行参数监控。连接时请使用PCI/LOCAL方式,并确保ZDevelop软件版本在3.10以上;
4.完成控制程序开发,通过LOCAL链接方式连接到运动控制卡,实现实时运动控制。

我们可以从测试对比结果看出,XPCIE1032H运动控制卡配合实时运动控制内核MotionRT7,在LOCAL链接(核内交互)的方式下,指令交互的效率是非常稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,非常适用于高速高精的应用。
XPCIE1032H驱动安装与建立连接参考往期文章EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接。
一、C#语言进行运动控制项目开发

二、PC函数介绍
相关PC函数介绍详情可参考“ZMotion PC函数库编程手册 V2.1.1”。
三、XML文件生成ZML文件添加步骤
大家都知道,正运动总线控制器事先就把一些总线从站的XML文件添加到控制器的固件里面了,所以配合市面上大部分的EtherCAT从站,客户只需要下载总线初始化脚本就可以和对应从站通讯,具体可以参考往期推文EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化。针对市面上刚出的总线从站,我们没有及时把XML文件添加到控制器固件里面或总线扫描的时候遇见不支持的从站,这个时候需要我们自己添加XML文件。

正运动控制器添加XML文件的步骤如下:
(1)通过XMLParsingTools工具软件将XML转换成ZML文件;
(2)把生成的ZML文件添加到Zpj项目里面,连同总线初始化脚本的Bas文件一起下载到控制器里面即可。
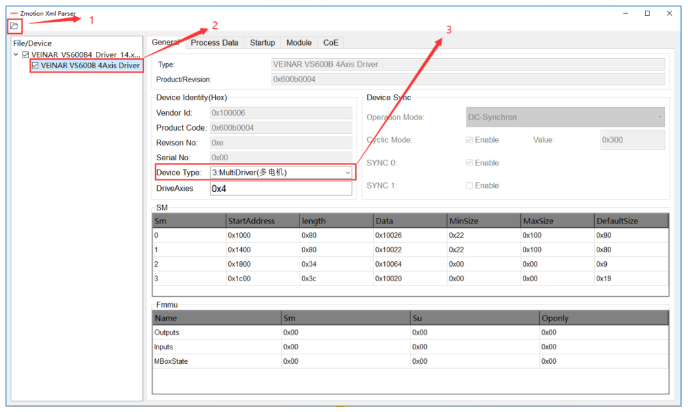
1、通过XMLParsingTools工具将XML文件转换成ZML文件。
(1)点击左上角文件夹打开XML文件,选择对应的从站型号和从站类型(这里以友商的一拖四总线驱动器为例)。
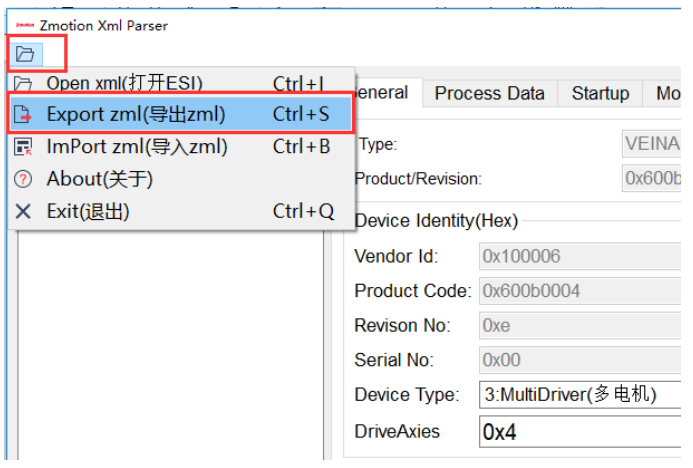
(2)点击左上角文件夹位置导出ZML文件即可。
2、RTSys软件同时下载ZML文件与总线初始化的Bas文件(下载ZPJ项目)。
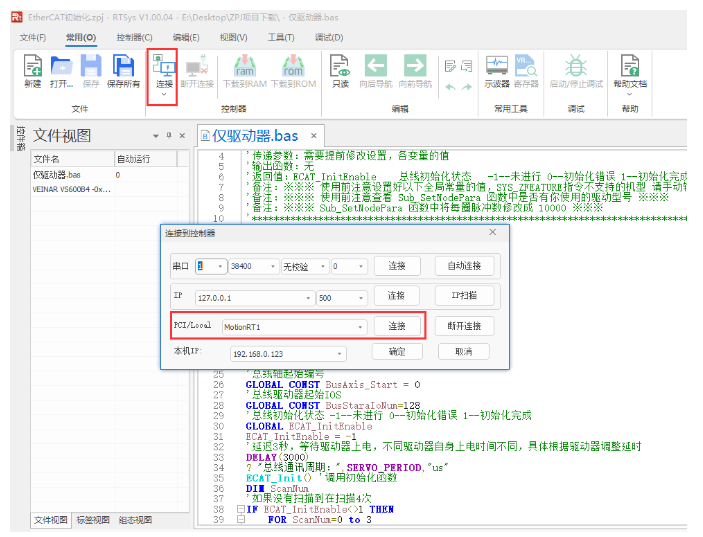
(1)把刚刚生成的ZML文件拷贝到总线初始化的ZPJ项目文件夹下,通过RTSys软件打开【EtherCAT参数.zpj】这个项目文件。
(2)右键文件视图区域,点击【增加到项目】将刚刚生成的ZML文件添加到项目里面。
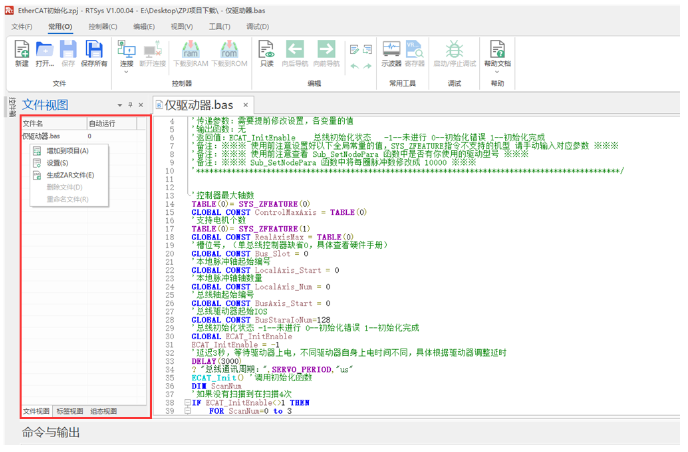
(3)点击连接按钮,通过Local接口链接上控制器。
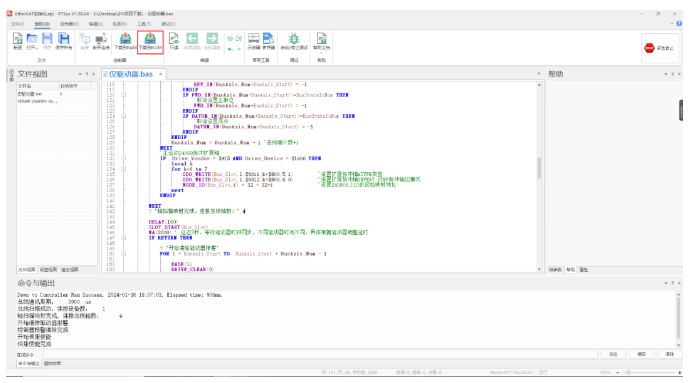
(4)点击【下载到ROM】,将整个项目下载到控制器里面掉电保存即可。
3.将例程下载到ZML文件与总线初始化的Bas文件。
连接控制器,新建ZPJ项目文件,将总线初始化的Bas文件和刚刚生成的zml文件复制到新建项目的目录下并一一添加进来,最后下载到控制器的ROM里面即可掉电保存。
三、应用例程及实现效果
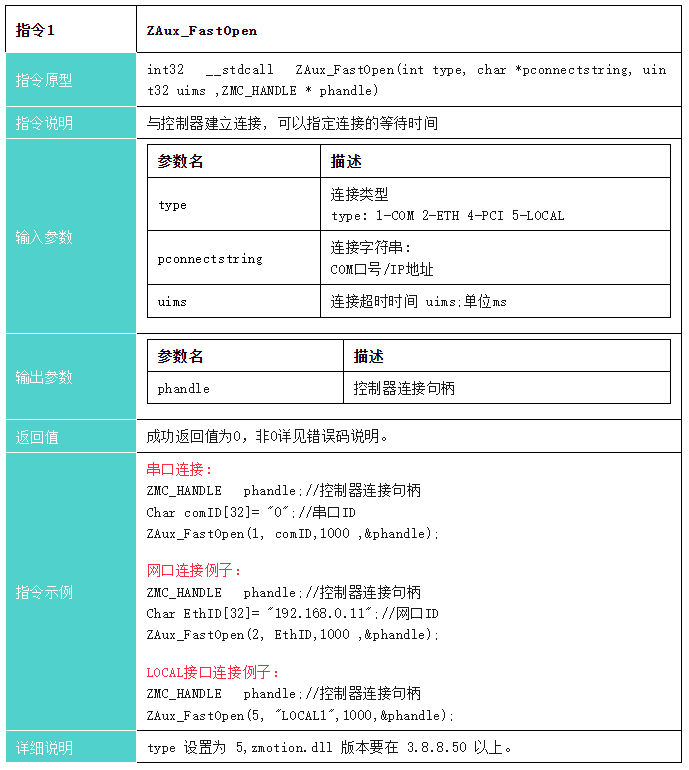
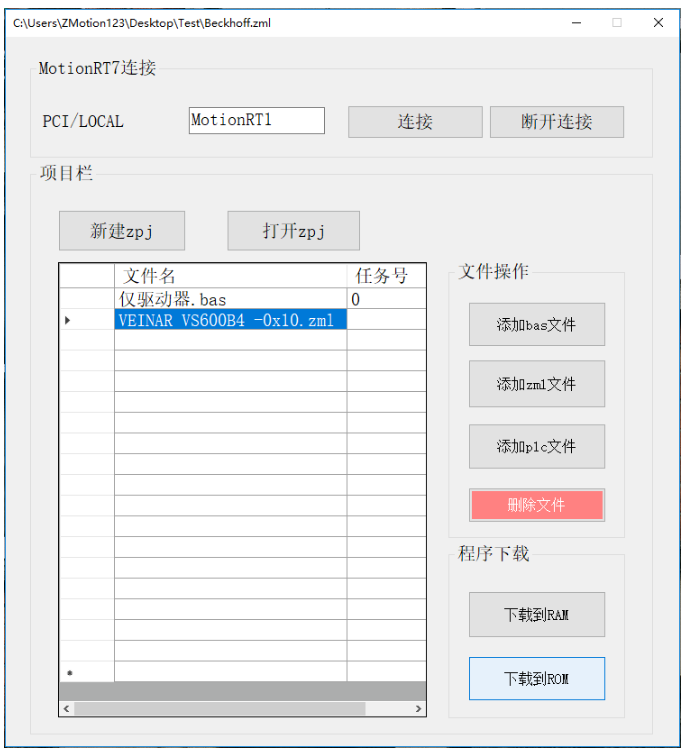
1、点击连接按钮链接到MotionRT7运动控制软核。
//连接控制器 private void Btn_cn_Click(object sender, EventArgs e) { int ret; //链接控制器 ret= zmcaux.ZAux_FastOpen(5,textBox1.Text,1000,out g_handle); if (g_handle != (IntPtr)0) { MessageBox.Show("RT7链接成功!", "提示"); timer1.Enabled = true; } else { MessageBox.Show("RT7链接失败"+"错误代码"+ ret); } }
2、新建Zpj项目文件。
//新建zpj文件 private void NewZpjFile_Click(object sender, EventArgs e) { try { //创建保存文件对话框 SaveFileDialog saveFile = new SaveFileDialog(); saveFile.Filter = "ZMC Project Files(*.zpj)|*.zpj"; //是否覆盖当前文件 saveFile.OverwritePrompt = true; //如果设为true就会使用系统默认目录 saveFile.RestoreDirectory = true; //还原目录 //如果保存对话框操作成功 if (saveFile.ShowDialog() == DialogResult.OK) { FileStream fs1 =new FileStream(saveFile.FileName, FileMode.Create, FileAccess.ReadWrite); fs1.Close(); //ZPJ文件名 m_ZpjFileName = saveFile.FileName; //ZPJ文件路径 m_ZpjFilePath = System.IO.Path.GetDirectoryName(m_ZpjFileName); System.IO.File.Create(m_ZpjFileName).Close(); Thread.Sleep(100); if (!System.IO.File.Exists(m_ZpjFileName)) { MessageBox.Show("文件不存在"); } //初始化ZPJ文件信息 Czpj(); } } catch (Exception ex) { MessageBox.Show(ex.Message); } } //初始化ZPJ文件信息_通过Ini文件记录 public void Czpj() { string LpAppname, Lpkeynum, Lpdata; LpAppname = "Controller"; Lpkeynum = "TypeName "; //写控制器信息,初始化ZPJ文件信息 Thread.Sleep(200); var MyIni = new IniFile(@m_ZpjFileName); MyIni.Write(Lpkeynum, "", LpAppname); MyIni.Write("IfUpload", "0", LpAppname); MyIni.Write("UserVersion", "1.0", LpAppname); Lpdata = num.ToString(); // MyIni.Write("Files",Lpdata, LpAppname); MyIni.Write("Breaks", "0", LpAppname); MyIni.Write("Watches", "0", LpAppname); MyIni.Write("PicPack", "0", LpAppname); MyIni.Write("BREAKMODE", "1", LpAppname); m_ZpjOPenFlag = true; }
3、添加Bas文件到Zpj项目里面。
//添加bas文件 private void AddBas_Click(object sender, EventArgs e) { if (!m_ZpjOPenFlag) { MessageBox.Show("先新建/打开ZPJ项目!"); return; } //创建打开文件对话框 OpenFileDialog ofd2 = new OpenFileDialog(); ofd2.Filter = "ZMC Basic Files (*.bas)|*.bas"; ofd2.RestoreDirectory = true; //如果文件选择成功 if (ofd2.ShowDialog() == DialogResult.OK) { string fullname = ofd2.FileName; m_ZpjFilePath = System.IO.Path.GetDirectoryName(fullname); //路径 m_SubFileName = System.IO.Path.GetFileName(fullname); //名称 m_ZpjFile_Info[num].pFileName = m_SubFileName; m_ZpjFile_Info[num].nAutoTask = -1; m_ZpjFile_Info[num].nFileType= 1; //bas的文件类型是1 num++; //通过Ini文件来记录Zpj项目文件信息 SaveZpj(); //在控件上显示出来项目文件信息 ShowFileList(); } } //保存ZPJ文件 public void SaveZpj() { //打开ZPJ的ini文件 string IniFileName = m_ZpjFilePath + "" + m_ZpjFileName; var MyIni = new IniFile(IniFileName); string LpAppname, Lpkeynum, Lpdata; LpAppname = "Controller"; Lpkeynum = "TypeName "; String iFileName = ""; MyIni.Write("Files", num.ToString(), LpAppname); //写FileList信息 LpAppname = "FileList"; //遍历ZPJ里面的文件情况 int i=0; for (i = 0; i < num; i++) { if (m_ZpjFile_Info[i].pFileName == "") { Lpdata = "空文件!" + m_ZpjFile_Info[i].nAutoTask.ToString(); } //子文件名带路径 iFileName = m_ZpjFilePath + "\" + m_ZpjFile_Info[i].pFileName; if (!System.IO.File.Exists(iFileName)) { Lpdata = "文件不存在!" + m_ZpjFile_Info[i].pFileName; MessageBox.Show(Lpdata); } //更新子文件ID Lpkeynum = "File" + (i + 1); Lpdata = m_ZpjFile_Info[i].pFileName; MyIni.Write(Lpkeynum, Lpdata, LpAppname); //更新子文件类型 Lpkeynum = "FileType" + (i + 1); Lpdata = m_ZpjFile_Info[i].nFileType.ToString(); MyIni.Write(Lpkeynum, Lpdata, LpAppname); //更新子文件自动运行号 Lpkeynum = "AutoRun" + (i + 1); Lpdata = m_ZpjFile_Info[i].nAutoTask.ToString(); MyIni.Write(Lpkeynum, Lpdata, LpAppname); } //删除多余的键 Lpkeynum = "File" + (num+1); MyIni.DeleteKey(Lpkeynum, LpAppname); Lpkeynum = "FileType" + (num + 1); MyIni.DeleteKey(Lpkeynum, LpAppname); Lpkeynum = "AutoRun" + (num + 1); MyIni.DeleteKey(Lpkeynum, LpAppname); //写OpenList信息 LpAppname = "OpenList"; m_ZpjOPenFlag = true; }
4、添加Zml文件到Zpj项目里面。
//添加zml文件 private void AddZml_Click(object sender, EventArgs e) { if (!m_ZpjOPenFlag) { MessageBox.Show("先新建/打开ZPJ项目!"); return; } OpenFileDialog ofd2 = new OpenFileDialog(); ofd2.Filter = "ZMC ZML Files (*.zml)|*.zml"; ofd2.RestoreDirectory = true; if (ofd2.ShowDialog() == DialogResult.OK) { string fullname = ofd2.FileName; m_ZpjFilePath = System.IO.Path.GetDirectoryName(fullname); //路径 m_SubFileName = System.IO.Path.GetFileName(fullname); //名称 m_ZpjFile_Info[num].pFileName = m_SubFileName; m_ZpjFile_Info[num].nAutoTask = -1; m_ZpjFile_Info[num].nFileType = 19;//ZML文件的文件类型是19 num++; //通过Ini文件来记录Zpj项目文件信息 SaveZpj(); //在控件上显示出来项目文件信息 ShowFileList(); } }
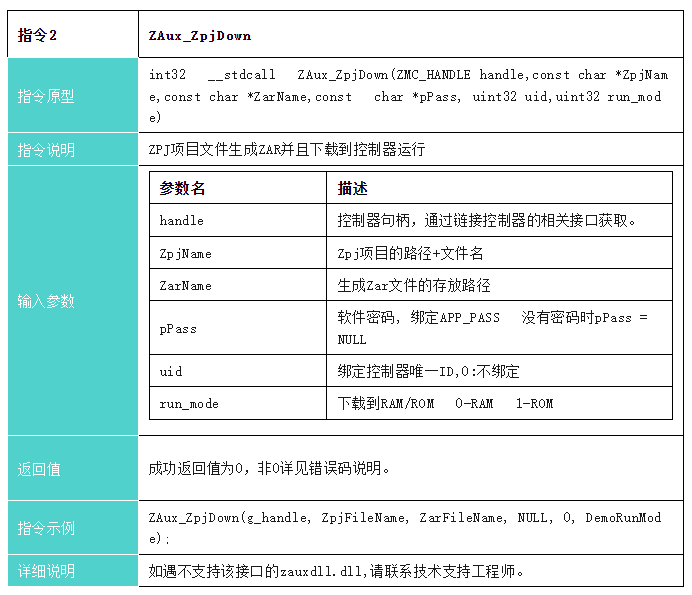
5、将ZPJ文件下载到控制器的ROM里面进行掉电保存。
//下载到rom private void button9_Click(object sender, EventArgs e) { if (!m_ZpjOPenFlag) { MessageBox.Show("先新建/打开ZPJ项目!"); return; } if (g_handle != (IntPtr)0) { ShowFileListSave(); SaveZpj(); String ZpjFileName = m_ZpjFilePath + "" + m_ZpjFileName; String m_ZarFileName = m_ZpjFilePath + "" + "ZmcZpj.Zar"; //将ZPJ项目下载到控制器的ROM里面 zmcaux.ZAux_ZpjDown(g_handle, ZpjFileName, m_ZarFileName, null, 0, 1); } else { MessageBox.Show("控制器未连接"); } }
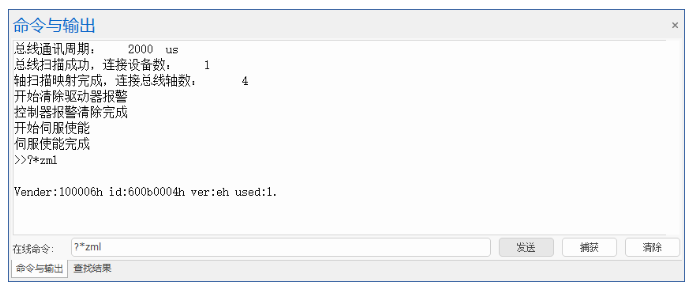
6、通过RTSys软件监控Zpj文件下载后的执行情况。
本次,正运动技术项目工程下载与XML配置文件下载:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十),就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
运动控制
+关注
关注
4文章
587浏览量
32954 -
运动控制卡
+关注
关注
7文章
114浏览量
15503 -
ethercat
+关注
关注
18文章
732浏览量
38843 -
正运动技术
+关注
关注
0文章
104浏览量
445
发布评论请先 登录
相关推荐
EtherCAT运动控制卡XPCIE1032H上位机开发(一):驱动安装

单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)




不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡(二):EtherCAT总线初始化

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论