 步进电机工作原理 步进电机和伺服电机的区别
步进电机工作原理 步进电机和伺服电机的区别
步进电机是一种电动机的类型,它以准确的固定角度步进方式运转。步进电机内部包含电磁铁和旋转式永磁转子,通过电流的变化控制电磁铁的磁场强度,从而产生扭矩,驱动转子旋转。步进电机通常用于需要准确位置控制的应用,如打印机、数控机床等。
步进电机的工作原理可以分为两种类型:可变磁场型步进电机和磁转子型步进电机。
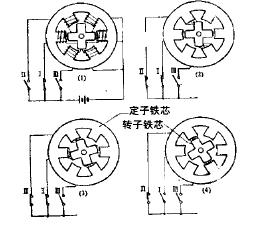
可变磁场型步进电机通过改变电磁铁的磁场强度以及方向来控制转子转动的步进角度。它通常由两个或多个电磁铁组成,这些电磁铁按照一定的顺序分别通电,产生的磁场相互作用,使得转子按照步进角度旋转。
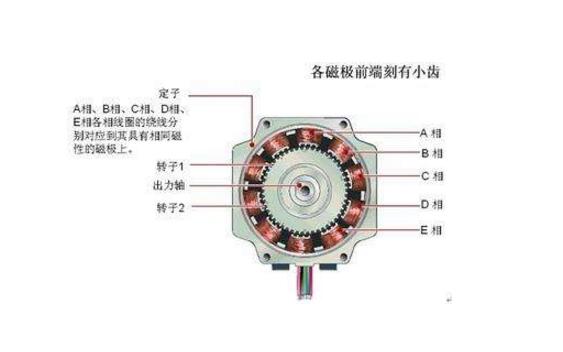
磁转子型步进电机利用永磁体和可变磁极之间的相互作用来驱动转子旋转。这种类型的电机转子是由多个极化的磁性材料组成,通过改变电磁铁的磁场,使得磁转子的极性发生改变,从而导致转子旋转。
步进电机的特点包括:定位精度高、扭矩平稳、启动和停止响应迅速、结构简单、零售状态保持等。
与步进电机相比,伺服电机是一种有闭环控制系统的电机,它可以根据外部反馈信号对输出位置进行精确调整。伺服电机通常由电机本身、传感器、控制器和反馈装置组成。
伺服电机和步进电机的主要区别如下:
- 控制方式不同:步进电机通过改变电流来控制磁场,从而实现步进运动;而伺服电机通过反馈信号进行闭环控制,可以实现更精确的位置调整。
- 驱动方式不同:步进电机一次驱动一个步进角度,转动一个固定角度;而伺服电机可以以连续的方式旋转,控制位置更加精准。
- 动态响应能力不同:伺服电机具有更快的动态响应能力,能够快速调整位置以适应外部环境的变化;步进电机的动态性能相对较低。
- 抗负载能力不同:伺服电机通过闭环控制可以根据负载变化进行实时调整,具有较高的抗负载能力;步进电机的负载能力相对较低。
- 使用复杂度不同:伺服电机的控制系统相对复杂,需要使用编码器等额外的传感器和控制器来实现闭环控制;而步进电机的控制相对简单,无需额外的传感器。
总结起来,步进电机适合需要精确位置控制、成本较低的应用领域,如打印机、数控机床等;而伺服电机适合需要精确控制位置、动态性能要求较高的应用领域,如机器人、航空航天等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16487浏览量
179792 -
步进电机
+关注
关注
152文章
3121浏览量
147941 -
伺服电机
+关注
关注
85文章
2061浏览量
58319 -
永磁转子
+关注
关注
0文章
6浏览量
1386
发布评论请先 登录
相关推荐



步进电机和伺服电机之间的主要区别是什么呢?
步进电机结构图(图片来源:鸣志公司) 伺服电机结构图(图片来源:鸣志公司) 下文简单叙述它们的差异: 1、工作原理 这两种








 工商网监
工商网监
评论