 用于水质和病毒监测的电驱动软体机器人开发
用于水质和病毒监测的电驱动软体机器人开发
微小型软体机器人是近年来机器人领域的重要分支,在狭小空间工程探索、生物体内药物递送、体内医疗诊断等领域扮演着重要角色。近日,香港城市大学于欣格团队联合大连理工大学解兆谦、北京航空航天大学常凌乾教授,合作开发了一款无源无线的电驱动软体机器人。
该软体机器人系统从无线化设计和多功能传感入手,实现了小型化软体机器人在封闭空间中对液体环境的物理、化学和生物各项指标的无线化监测。研究成果以Battery-free, wireless, and electricity-driven soft swimmer for water quality and virus monitoring(用于水质和病毒监测的无电池、无线、电力驱动的软体游泳机器人)为题,于2024年1月10日发表于Science开放获取子刊Science Advances杂志。
小尺寸机器人有能力在狭小和封闭空间中运动穿梭,因此,小尺寸机器人是在此类场景下(包括生物体内)执行环境监测或生物医学检测的一个理想装置。
为实现此类任务,机器人装置首先需要是无线的,任何绳索的牵绊都会限制其自由运动,这就要求机器人驱动和传感数据读取必须是无线化的;另外,机器人需具备多重传感能力,传感指标的多少关系到机器人监测能力和智能化的强弱;如此多的功能要求往往依靠于在机器人系统之中集成更多的模块,而这势必对机器人的小型化带来挑战。
针对上述问题,研究团队利用纯电学方式开发出了一款小型的、无线的、无电池的、电驱动机器人系统,可在封闭的水环境中实现多项指标的监测。首先,通过射频供电方式,电驱动机器人系统不需要安装电池就可以在封闭空间中不受束缚的运动,在特定驱动频率下,机器人可展现出谐振特性,并进行快速地游动。无电池化设计避免了机器人系统在尺寸和重量上的增加。
进一步地,该系统采用了柔性电子技术,集成了薄型轻质的多功能生物化学传感器和无线化数据采集模块,传感器可对水中离子和病毒浓度进行检测,所有检测数据均同步传输,并通过近场通信技术显示在智能手机图形用户界面上,最终实现对水质和病原体污染情况的实时评估。
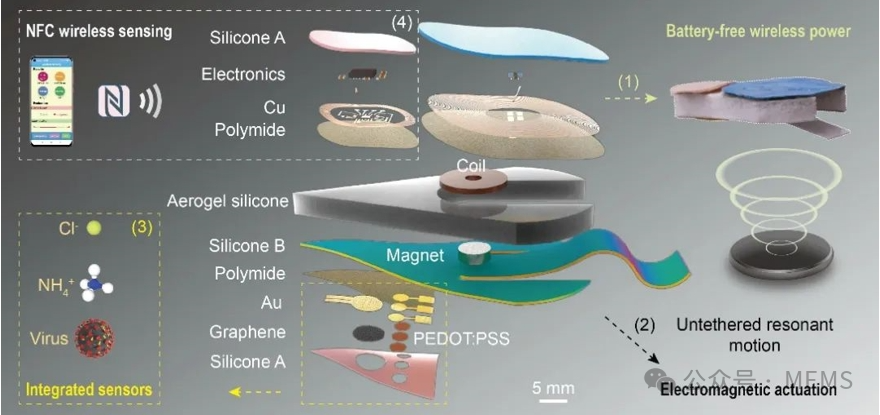
无源无线软体机器人监测系统的总体构造和功能图
该研究以管道场景为例子,展现了此小型软体机器人系统在封闭环境下对温度、离子和病毒的检测能力。该研究展现了在封闭空间下,机器人驱动的无线化和无电池化,并且无需取出机器人装置即可无线化地读取监测数据。此无线化技术,亦可用于开发体内生物医用软体机器人系统,以实现机器人的体内监测和体内主动医疗功能。
香港城市大学生物医学工程学系于欣格教授、大连理工大学力学工程系解兆谦教授、北京航空航天大学生物与医学工程学院常凌乾教授为论文通讯作者。论文共同第一作者为香港城市大学生物医学工程学系研究员李登峰、博士生周靖昆和黄星灿、博士后李虎,以及大连理工大学力学工程系博士生赵紫晨。该研究得到了国家自然科学基金、科技部重点研发计划、香港研究资助局、香港创新科技署、国家重点研发计划等项目的资助。
审核编辑:刘清
-
传感器
+关注
关注
2550文章
51056浏览量
753270 -
数据采集
+关注
关注
38文章
6074浏览量
113637 -
软体机器人
+关注
关注
1文章
111浏览量
11701
原文标题:用于水质和病毒监测的电驱动软体机器人
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

【「具身智能机器人系统」阅读体验】+初品的体验
高压放大器在水下扑翼软体机器人研究中的应用


高压放大器在介电弹性体折纸术软体机器人中的应用

清华大学:软体机器人柔性传感技术最新研究进展

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
abb工业机器人的编程语言是什么
全球机器人开发领域采用NVIDIA 机器人开发和生产
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用

基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性

高压放大器在介电弹性体折纸术软体机器人中的应用
基于双边介电弹性体致动器的肌肉启发软体机器人设计






 工商网监
工商网监
评论