 对象检测边界框损失函数–从IOU到ProbIOU介绍
对象检测边界框损失函数–从IOU到ProbIOU介绍

概述
目标检测损失函数的选择在目标检测问题建模中至关重要。通常,目标检测需要两个损失函数,一个用于对象分类,另一个用于边界框回归(BBR)。本文将重点介绍 IoU 损失函数(GIoU 损失、DIoU 损失和 CIoU 损失、ProbIoU)。首先来了解一下什么是最原始的IoU定义
什么是IOU(并交比)
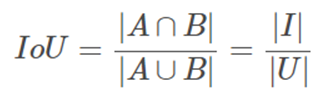
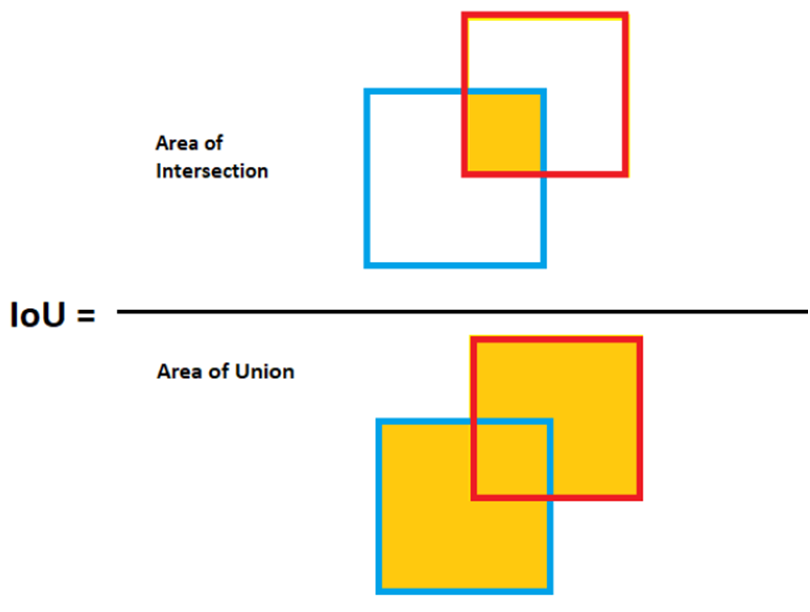
对象检测中的 mAP(平均精度)指标是根据 IoU(交集超过并集)进行评估的。因此,BBR使用基于 IoU 的损失函数来实现计算mAP,mAP的典型计算公式与表示如下:
但是这种最原始的IoU并交比的损失计算方式是有缺陷的,如当预测框与真实框没有相交的时候,IoU损失就是0,这样就导致了没有梯度,导致训练的效果就会打折许多。
改进之GIoU
于是有个聪明的人发现,这样可以稍微避免这种问题的发生,就是把预测框与真实框(A与B)合起来求最小的外接矩形,就变成了如下:
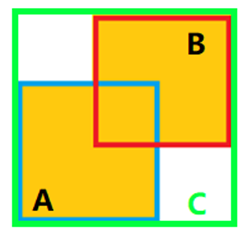
对应的GIoU的计算公式就改成了:
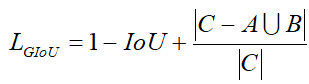
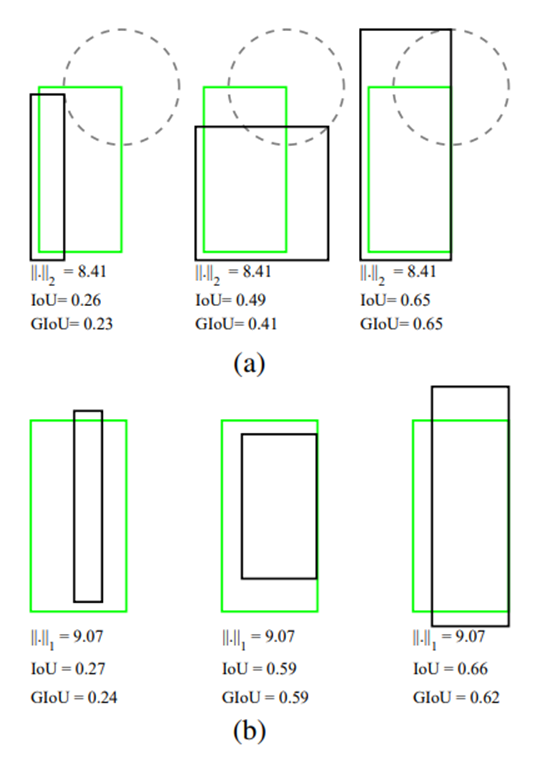
下图是分别基于L2与L1损失相同的情况下,IoU跟GIoU有明显的差异比较。
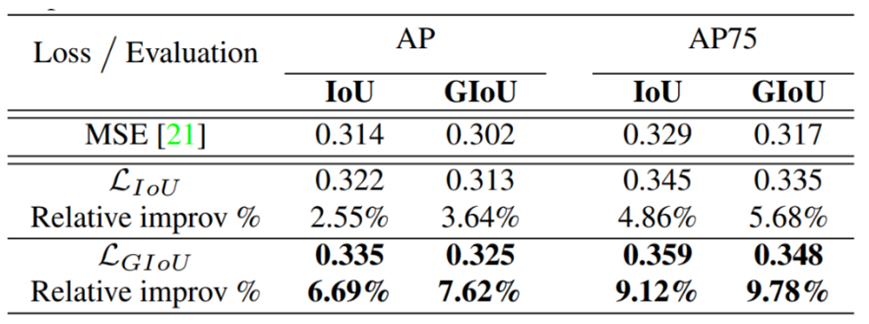
加入惩罚项因子以后,对于没有重叠的预测也可以实现边界框回归了,从而改善了IoU的缺陷。论文给出的实验结果如下:
改进之DIoU与CIoU
作者把IoU损失看成是一个通用的公式如下:

其中R是惩罚性因子,这样R=0的时候就是普通的IoU损失,从而把IoU损失改进看成是寻找好的惩罚性因子,然后作者通过一通神的思考以后给出了下面的惩罚性因子公式:
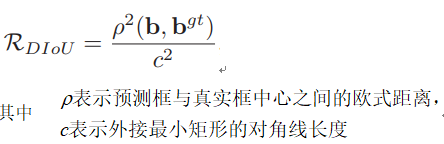
这样 DIoU就出来
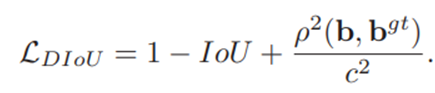
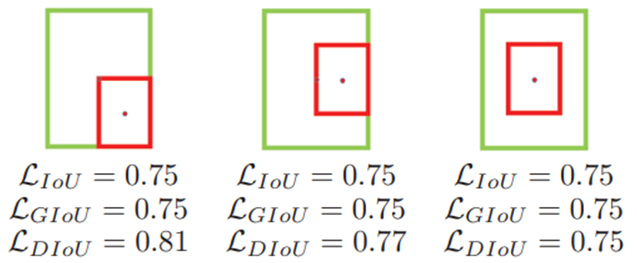
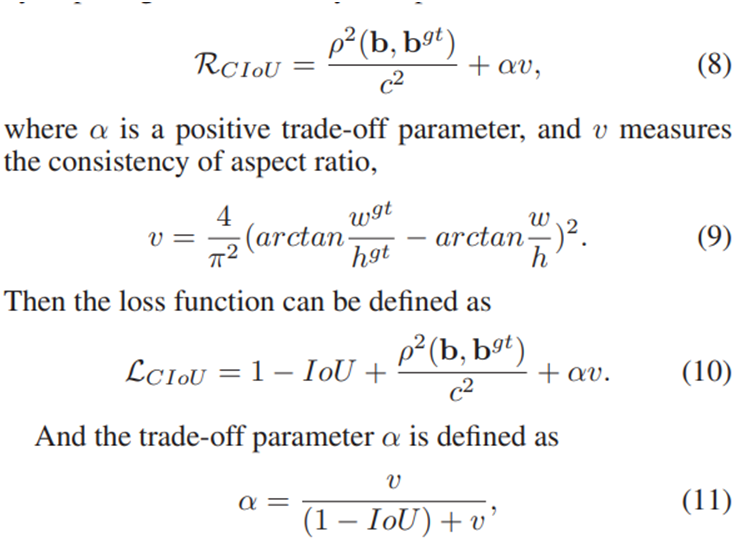
这样是不是梯度会大一些,回归起来会更猛一点,效果会更好点。但是作者说好的BBR应该考虑三个指标分别是重叠、中心位置距离、横纵比,DIoU只考虑前面两个,还有最后一个还没有考虑到,所以还可以改进,改进之后才是完整的IoU损失(CIoU),然后就得到了另外一个惩罚性因子公式跟对应的CIoU损失:
然后作者给出了实验结果:
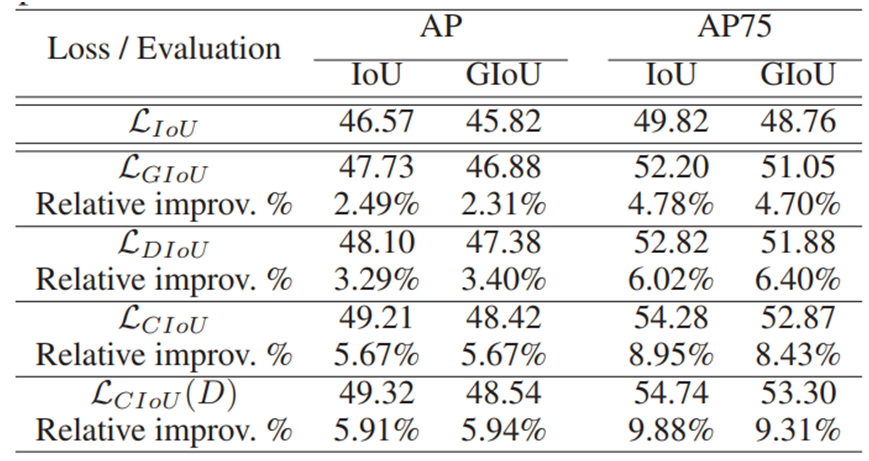
说明CIoU开挂了,所以YOLOv8默认就是CIoU。
ProbIoU
ProbIoU可以实现OBB旋转对象映射到GBB、然后实现预测框与真实框的回归IoU损失功能,然后基于协方差矩阵,计算巴氏距离以后,再基于BD实现损失计算

跟原始的IoU比较,有明显的改善:
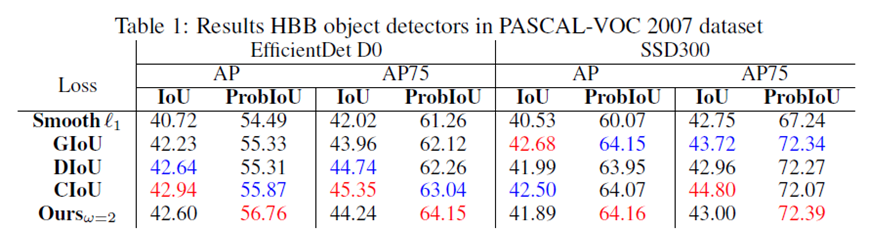
然后它自己说靠谱,所以YOLOv8的旋转对象检测就采用了ProbIoU来做BBR。
审核编辑:刘清
-
MAP
+关注
关注
0文章
50浏览量
15891
原文标题:对象检测边界框损失 – 从IOU到ProbIOU
文章出处:【微信号:CVSCHOOL,微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
TensorFlow损失函数(定义和使用)详解
结合预测框和目标框之间的归一化距离来提出距离-IoU (DIoU) Loss
YOLOv5全面解析教程之目标检测模型精确度评估
基于YOLOX目标检测算法的改进
深度学习:什么是IoU?
一种新的带有不确定性的边界框回归损失,可用于学习更准确的目标定位

一种新的、更精细的对象表示方法 ——RepPoints ,比边界框更好用的目标检测方法

三种常见的损失函数和两种常用的激活函数介绍和可视化
RepPoints 比边界框更好用的目标检测方法

损失函数的简要介绍
PyTorch教程-14.7。单发多框检测





评论