 SoC入门:APBmaster设计主站设计原理与实践
SoC入门:APBmaster设计主站设计原理与实践
大家不要以为APB的master和slave很简单,不需要了解。这是大错特错,为什么呢?
不过设计什么模块,你都要让它挂在标准总线上,比如你设计DMA,你就同时需要了解AMBA的master和slave设计。又比如你是设计算法计算模块,你的数据肯定要放到sram,你当然也要了解AMBA的master设计,将数据传输到crossbar上,进而放到指定memory。又比如SOC设计,肯定需要各种bridge,假设一个AHB2APB,你就同时需要了解AHB slave和APB master。
以APB为例,还是因为APB简单,但是我们可以从它学到设计的方法和思路。
既然是设计就需要spec和状态机。
设计spec如下
1、模块规划
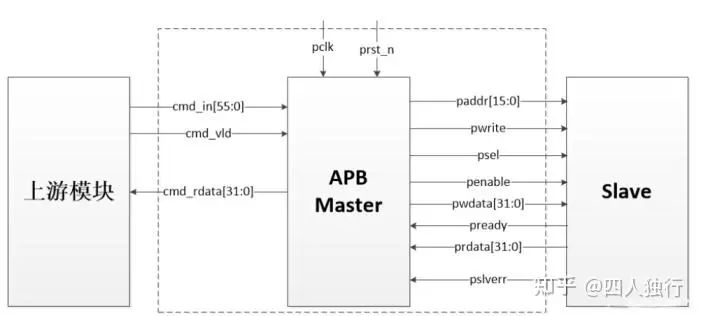
模块diagram
2、接口描述

接口描述
3、时序描述
读时序
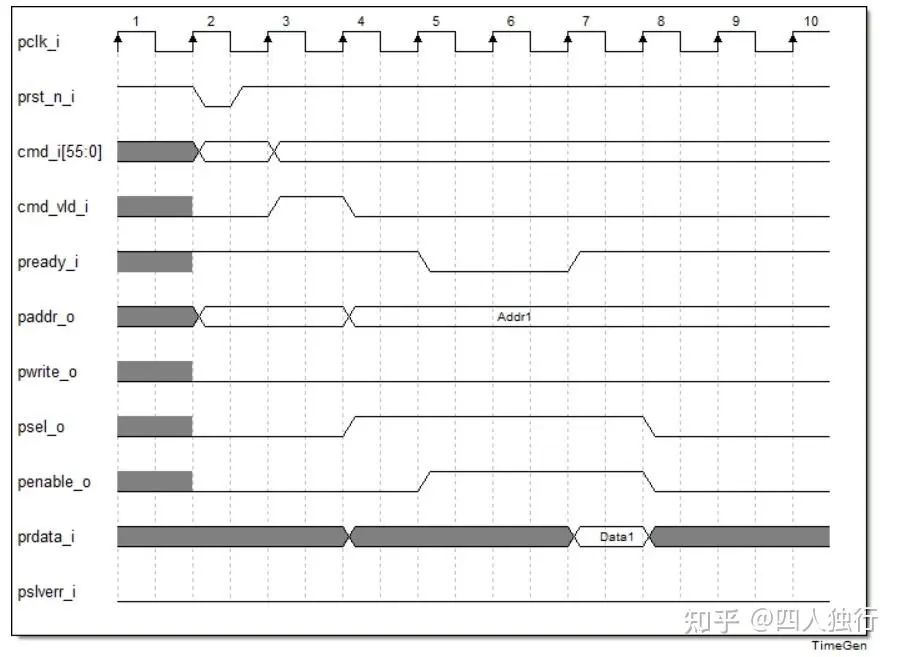
读时序
写时序
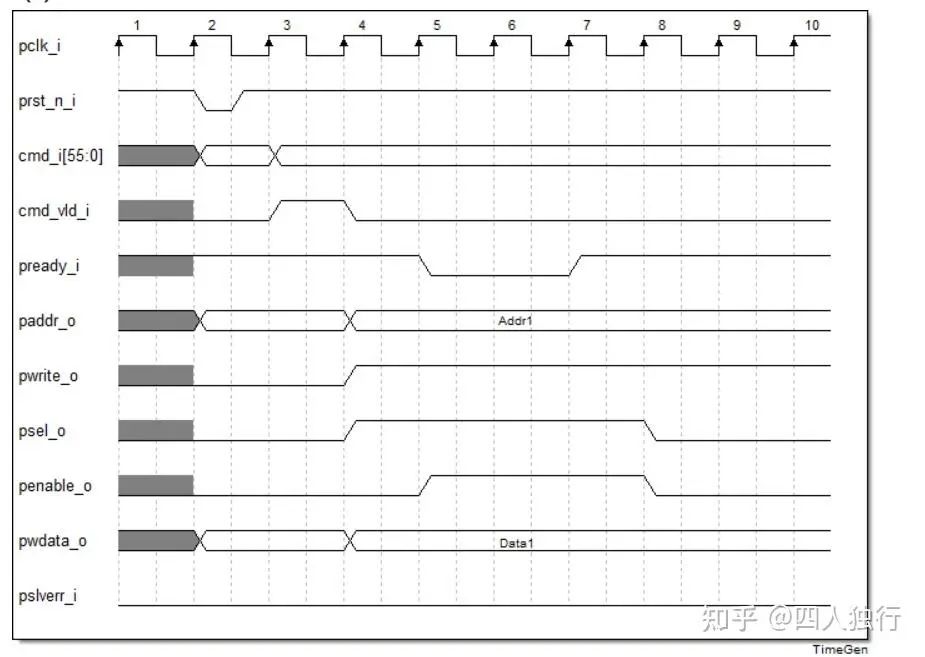
写时序
4、FSM
就是之前讲的APB协议状态机。如下图

APB FSM
模块规划有了,接口有了,时序有了,状态机有了,就可以开始设计coding了,代码如下:
module apb #( parameter RD_FLAG = 8'b0 , parameter WR_FLAG = 8'b1 , parameter CMD_RW_WIDTH = 8 , parameter CMD_ADDR_WIDTH = 16 , parameter CMD_DATA_WIDTH = 32 , parameter CMD_WIDTH = CMD_RW_WIDTH + CMD_ADDR_WIDTH + CMD_DATA_WIDTH )( //-- clkrst signal input pclk_i , input prst_n_i , //-- cmd_in input [CMD_WIDTH-1:0] cmd_i , input cmd_vld_i , output reg [CMD_DATA_WIDTH-1:0] cmd_rd_data_o, //-- apb interface output reg [CMD_ADDR_WIDTH-1:0] paddr_o , output reg pwrite_o , output reg psel_o , output reg penable_o , output reg [CMD_DATA_WIDTH-1:0] pwdata_o , input [CMD_DATA_WIDTH-1:0] prdata_i , input pready_i , input pslverr_i ); //-- FSM state parameter IDLE = 3'b001; parameter SETUP = 3'b010; parameter ACCESS = 3'b100; //-- current state and next state reg [2:0] cur_state; reg [2:0] nxt_state; //-- data buf reg start_flag ; reg [CMD_WIDTH-1:0] cmd_in_buf ; reg [CMD_DATA_WIDTH-1:0] cmd_rd_data_buf; /*----------------------------------------------- -- update cmd_in_buf -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin cmd_in_buf <= {(CMD_WIDTH){1'b0}}; end else if (cmd_vld_i && pready_i) begin cmd_in_buf <= cmd_i; end end /*----------------------------------------------- -- start flag of transfer -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin start_flag <= 1'b0; end else if (cmd_vld_i && pready_i) begin start_flag <= 1'b1; end else begin start_flag <= 1'b0; end end /*----------------------------------------------- -- update current state -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin cur_state <= IDLE; end else begin cur_state <= nxt_state; end end /*----------------------------------------------- -- update next state -- -----------------------------------------------*/ always @ (*) begin case(cur_state) IDLE :if(start_flag)begin nxt_state = SETUP; end else begin nxt_state = IDLE; end SETUP :nxt_state = ACCESS; ACCESS:if (!pready_i)begin nxt_state = ACCESS; end else if(start_flag)begin nxt_state = SETUP; end else if(!cmd_vld_i && pready_i)begin nxt_state = IDLE; end endcase end /*----------------------------------------------- -- update signal of output -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin pwrite_o <= 1'b0; psel_o <= 1'b0; penable_o <= 1'b0; paddr_o <= {(CMD_ADDR_WIDTH){1'b0}}; pwdata_o <= {(CMD_DATA_WIDTH){1'b0}}; end else if (nxt_state == IDLE) begin psel_o <= 1'b0; penable_o <= 1'b0; end else if(nxt_state == SETUP)begin psel_o <= 1'b1; penable_o <= 1'b0; paddr_o <= cmd_in_buf[CMD_WIDTH-CMD_RW_WIDTH-1:CMD_DATA_WIDTH]; //-- read if(cmd_in_buf[CMD_WIDTH-1:CMD_WIDTH-8] == RD_FLAG)begin pwrite_o <= 1'b0; end //-- write else begin pwrite_o <= 1'b1; pwdata_o <= cmd_in_buf[CMD_DATA_WIDTH-1:0]; end end else if(nxt_state == ACCESS)begin penable_o <= 1'b1; end end /*----------------------------------------------- -- update cmd_rd_data_buf -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin cmd_rd_data_buf <= {(CMD_DATA_WIDTH){1'b0}}; end else if (pready_i && psel_o && penable_o) begin cmd_rd_data_buf <= prdata_i; end end /*----------------------------------------------- -- update cmd_rd_data_o -- -----------------------------------------------*/ always @ (posedge pclk_i or negedge prst_n_i) begin if (!prst_n_i) begin cmd_rd_data_o <= {(CMD_DATA_WIDTH){1'b0}}; end else begin cmd_rd_data_o <= cmd_rd_data_buf; end end endmodule
模块设计的比较简单,只是实现APB的基本功能。下面讲一下设计重点:
·一定要做好功课在开始coding。
·Flow control,APB的上级模块,需要给到流控信号,告知APB master什么时候开始传输,什么时候结束。
·FSM,必须完全遵循AMBA的datasheet。
·时序对齐,和FSM一样,接口时序要和APB协议对齐。
·重点中的重点,pready的反压一定要逐级反压,不能直接送到APB master的上次模块,这样会丢数据。
testbench如下
`timescale 1ns/1ns module tb_apb; reg pclk_i ; reg prst_n_i ; reg [55:0] cmd_i ; reg cmd_vld_i ; wire [31:0] cmd_rd_data_o; wire [15:0] paddr_o ; wire pwrite_o ; wire psel_o ; wire penable_o ; wire [31:0] pwdata_o ; reg [31:0] prdata_i ; reg pready_i ; reg pslverr_i ; initial begin // rst; pclk_i = 0; prst_n_i = 1; pslverr_i = 0; cmd_i = 56'b0; cmd_vld_i = 0; prdata_i = 32'b0; pready_i = 1; #20 prst_n_i = 0; #20 prst_n_i = 1; // cmd_in_wr(cmd_i,56'h01_FF_EE_DD_CC_BB_AA); cmd_i = 56'h01_FF_EE_DD_CC_BB_AA; cmd_vld_i = 1 ; #20 cmd_vld_i = 0; #31 pready_i = 0; #80 pready_i = 1; #90; //cmd_in_rd(cmd_i,56'h00_AA_BB_CC_DD_EE_FF,prdata_i,32'h12_34_56_78); cmd_i = 56'h00_AA_BB_CC_DD_EE_FF; cmd_vld_i = 1; #20 cmd_vld_i = 0; #30 pready_i = 0; #60 pready_i = 1; prdata_i = 32'h12_34_56_78; cmd_i = 56'h00_AA_BB_CC_DD_EE_FF; cmd_vld_i = 1; #20 cmd_vld_i = 0; #30 pready_i = 0; #50 pready_i = 1; prdata_i = 32'h11_22_33_44; end always #10 pclk_i = ~pclk_i; //-- RST task rst; begin pclk_i = 1; prst_n_i = 1; pslverr_i = 0; cmd_i = 56'b0; cmd_vld_i = 0; prdata_i = 32'b0; pready_i = 1; #20 prst_n_i = 0; #10 prst_n_i = 1; //cmd_i = 56'h01_FF_EE_DD_CC_BB_Ab; end endtask //-- write task cmd_in_wr; output [55:0] cmd; input [55:0] data; begin cmd = data; cmd_vld_i = 1 ; #20 cmd_vld_i = 0; #20 pready_i = 0; #40 pready_i = 1; end endtask //-- read task cmd_in_rd; output [55:0] cmd; input [55:0] data ; output [31:0] prdata; input [31:0] rd_data; begin cmd = data; cmd_vld_i = 1; #20 cmd_vld_i = 0; #20 pready_i = 0; #40 pready_i = 1; prdata = rd_data; end endtask initial begin #1000 $finish; end apb tb_apb( .pclk_i (pclk_i ), .prst_n_i (prst_n_i ), .cmd_i (cmd_i ), .cmd_vld_i (cmd_vld_i ), .cmd_rd_data_o(cmd_rd_data_o), .paddr_o (paddr_o ), .pwrite_o (pwrite_o ), .psel_o (psel_o ), .penable_o (penable_o ), .pwdata_o (pwdata_o ), .prdata_i (prdata_i ), .pready_i (pready_i ), .pslverr_i (pslverr_i ) ); initial begin $fsdbDumpfile("apb.fsdb"); $fsdbDumpvars ; $fsdbDumpMDA ; end endmodule
makefile如下:
LAB_DIR = /home/*/apb DFILES = $(LAB_DIR)/*.v all:clean elab rung elab: vcs -full64 -LDFLAGS -Wl,-no-as-needed -debug_acc+all -timescale=1ns/1ns -fsdb -sverilog -l comp.log ${DFILES} run: ./simv -l run.log rung: ./simv -gui -l run.log verdi: verdi ${DFILES} -ssf ./*.fsdb & clean: rm -rf AN.DB rm -rf DVEfiles rm -rf csrc rm -rf simv.* rm -rf *simv rm -rf inter.vpd rm -rf ucli.key rm -rf *.log rm -rf verdiLog rm -rf novas* rm-rf*.fsdb
下面是仿真结果

好了,今天讲的主要就这么多,这个是基础,但也是干货,对以后设计AHB,AXI乃至NOC都非常有帮助。
审核编辑:黄飞
-
数据传输
+关注
关注
9文章
1926浏览量
64690 -
soc
+关注
关注
38文章
4183浏览量
218524 -
状态机
+关注
关注
2文章
492浏览量
27579
原文标题:SoC设计入门 - APB master设计(接口类基础思维)
文章出处:【微信号:IP与SoC设计,微信公众号:IP与SoC设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CAN主站与从站的功能是什么
Profibus-DP主站通信平台的设计方案

MELSEC iQ R CC Link系统主站/本地站模块用户手册(入门篇)

MELSEC iQ R AnyWireASlink主站模块用户手册(入门篇)
MELSEC iQ R DeviceNet主站/从站模块用户手册(入门篇)
EtherCAT 主站方案横向对比
EtherCAT主站方案之横向比较

通过Profinet主站转EtherCAT协议网关把profient从站设备接入到EtherCAT主站设备中





 工商网监
工商网监
评论