 ethercat总线伺服如何控制 EtherCAT运行原理
ethercat总线伺服如何控制 EtherCAT运行原理
ethercat总线伺服如何控制
EtherCAT(Ethernet for Control Automation Technology)是一种用于工业自动化的高性能实时以太网总线网络协议。它是一种快速的、实时的场总线通信协议,常用于控制伺服系统。
要控制EtherCAT总线上的伺服,你需要以下步骤:
1. 确保你的硬件设置正确:首先,需要正确安装和连接EtherCAT总线适配器和伺服驱动器。适配器负责将你的控制系统连接到EtherCAT总线网络,而伺服驱动器是用于控制伺服电机的设备。
2. 配置EtherCAT总线:使用适配器提供的配置软件,对EtherCAT总线进行配置。这可能涉及设置网络拓扑、地址分配和通信参数等。
3. 编写控制程序:使用编程软件(如PLC编程软件)编写控制程序,该程序可以向EtherCAT网络发送命令来控制伺服驱动器。控制程序可以使用各种编程语言,如C/C++、Structured Text(ST)或Function Block Diagram(FBD)。
4. 通信:通过控制程序发送命令到EtherCAT总线,以控制伺服驱动器。你可以发送命令来控制伺服的位置、速度、加速度等参数。
5. 反馈和监控:通过EtherCAT总线,你可以获取伺服驱动器的状态和反馈信息,如位置、速度和电流等。这些信息在控制系统中可以用于实时监控和反馈控制。
EtherCAT 运行原理
EtherCAT技术突破了其他以太网解决方案的系统限制:通过该项技术,无需接收以太网数据包,将其解码,之后再将过程数据复制到各个设备。EtherCAT从站设备在报文经过其节点时读取相应的编址数据,同样,输入数据也是在报文经过时插入至报文中(参见图1)。整个过程中,报文只有几纳秒的时间延迟。
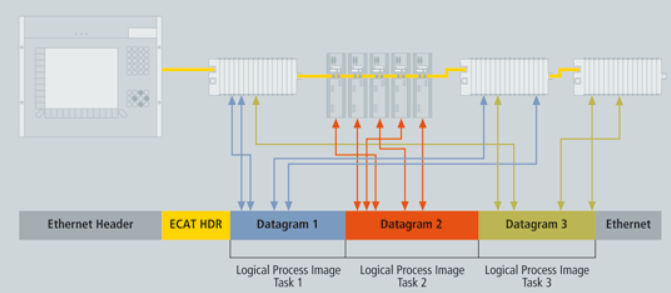
图 : 过程数据插入至报文中
由于发送和接收的以太网帧压缩了大量的设备数据,所以有效数据率可达90%以上。100 Mb/s TX的全双工特性完全得以利用,因此,有效数据率可 大于100 Mb/s(即大于2 x 100 Mb/s的90%)(参见图)。
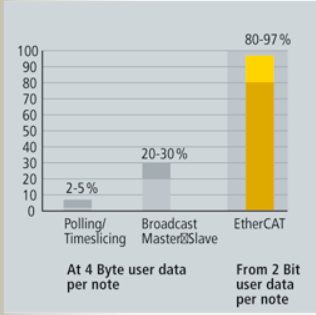
图 : 带宽利用率的比较
符合IEEE 802.3标准的以太网协议无需附加任何总线即可访问各个设备。耦合设备中的物理层可以将双绞线或光纤转换为LVDS(一种可供选择的以太网物理层标准[4,5]),以满足电子端子块等模块化设备的需求。这样,就可以非常经济地对模块化设备进行扩展了。之后,便可以如普通以太网一样,随时进行从底板物理层LVDS到100 Mb/s TX物理层的转换。
ethercat能用普通网线吗
EtherCAT可以使用普通的以太网电缆(也称为网线)进行连接。EtherCAT使用标准的以太网物理层传输数据,因此你可以使用常见的Cat5、Cat5e、Cat6或Cat7以太网电缆来连接EtherCAT适配器和设备。
然而,需要注意的是,尽管EtherCAT使用普通的以太网电缆进行物理连接,但它采用了自己的通信协议和数据帧结构。所以,即使使用普通网线连接,你仍然需要适配器和设备来支持EtherCAT协议和通信。这些设备具备了特殊的电路和处理器,用于实时和高性能的数据交换。
因此,在使用EtherCAT时,确保使用符合EtherCAT规范的适配器和设备,并根据厂商提供的配置工具和文档进行正确的设置和连接。这样,你就可以实现高性能实时控制和通信,而无需特殊的高成本硬件和电缆。
审核编辑:黄飞
-
以太网
+关注
关注
40文章
5480浏览量
173228 -
总线
+关注
关注
10文章
2914浏览量
88682 -
伺服系统
+关注
关注
14文章
576浏览量
39497 -
ethercat
+关注
关注
19文章
791浏览量
39094 -
伺服驱动器
+关注
关注
22文章
496浏览量
32022
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论