 百度Apollo City Driving Max荣获「年度智驾系统」
百度Apollo City Driving Max荣获「年度智驾系统」
近日,第八届“寻找有情感的出行伴侣”年度智能座驾评选颁奖典礼圆满举办,百度纯视觉高阶智驾产品Apollo City Driving Max荣获「年度智驾系统」奖项,“年度智能座驾评选”由智驾网主办,评选标准对标中汽研等专业机构标准,经过多年细化,更强调消费者用车的真实场景与体验,是业内最为专业、评选范围最为广泛、影响力最大的智能汽车车型评选活动。
根据L2+智驾功能逐渐成为新上市车型核心配置、高速NOA升级为城市NOA、更高效且成本更低的视觉方案迅速量产落地等行业变化,本届年度智能座驾评选进一步细化、优化测试场景,对入围车型进行城市真实道路评测、专业场地评测、以及专业设备评测,加大在城市LCC、高速NOA、城市NOA、自动泊车、记忆泊车等维度进行真实场景的评测。
此次百度Apollo City Driving Max获得「年度智驾系统」奖项,不仅彰显了行业对百度Apollo在智驾领域技术实力的高度认可,也标志着智能驾驶技术发展新标杆的诞生。
2023年,百度Apollo推出国内首个可量产的纯视觉高阶智驾产品Apollo City Driving Max,产品一经推出,迅速引发行业关注。在行业还处于“硬件狂堆料”的时代,百度Apollo创新性地使用“BEV+OCC+Transformer”纯视觉方案,打造覆盖泊车、高速、城市全域场景的高阶智驾产品,成功实现“去激光雷达”。即便在复杂城市道路场景,也能为用户带来与“有激光雷达”方案同样好的产品体验,且BOM成本更低,让整车更有价格竞争力。
领跑整个行业背后是百度Apollo多年的技术投入与积累。智驾行业发展初期,使用激光雷达可以降低算法研发难度,是行业普遍选择的方案。但实际上,在硬件局限条件下,激光雷达智驾方案算法上限低,后期迭代速度慢,并会很快到达天花板。相较之下,纯视觉智驾方案的算法上限更高、后期演进速度更快、且用户体验更好,但该方案前期启动速度缓慢,想要实现技术突破非常难。
百度Apollo最初便选择了一条更艰难的研发之路,2019年推出纯视觉方案Apollo Lite,并在该领域持续深耕。近一年,随着视觉大模型取得了巨大技术突破,百度Apollo在Apollo Lite框架基础上,用4D BEV Transformer全新升级第二代纯视觉感知系统,能够“快、准、稳”地预测道路参与者的时空位姿轨迹,同时,配合业内最前沿的占用网络OCC技术,对静态环境做端到端实时重建,可以获取比激光雷达点云分辨率更高的三维结构信息。
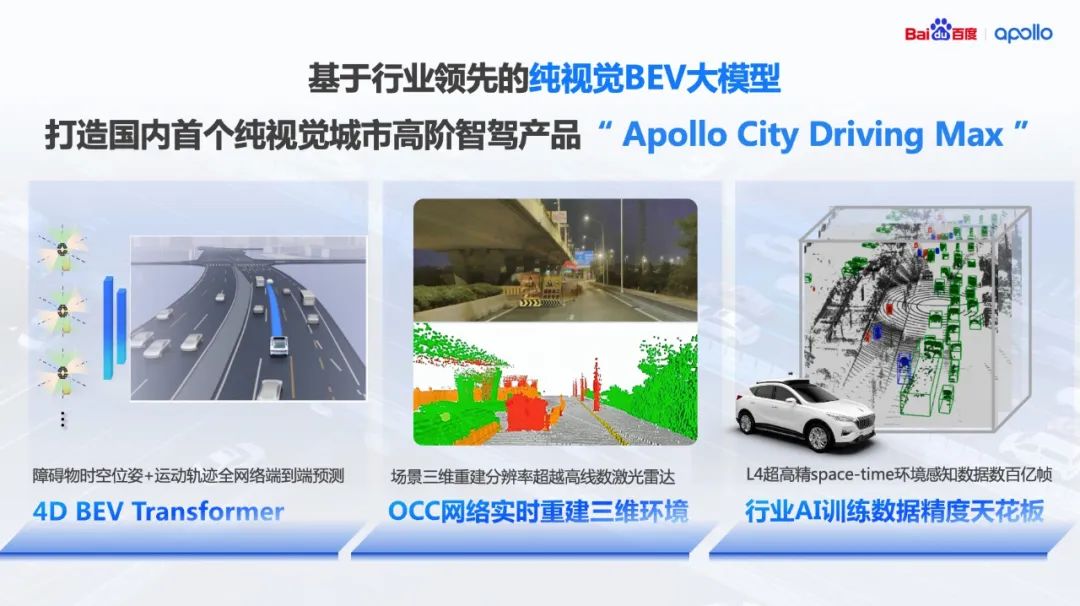
此外,百度Apollo还拥有高质量的Robotaxi原始数据积累,为纯视觉智驾方案打下“冷启动”数据基础。超过170亿参数的视觉大模型、日均产能百万帧的自动化标注产线、上亿帧的BEV+OCC精标训练数据,也加速了纯视觉方案的打造与后续优化。
基于此,2023年百度Apollo推出国内首个纯视觉BEV+Transformer动态障碍物感知技术、国内首个OCC占用网络技术,国内首个可量产的纯视觉城市高阶智驾产品,目前均已在极越01实现量产。在百度Apollo技术赋能下,极越01能够实现对障碍物更加精细的刻画,3D精度可以做到厘米级,比肩甚至超过激光雷达精度。
随着AI技术与大模型的快速演进与深度应用,百度Apollo将在高阶智能驾驶领域持续深耕,进一步降低城区高阶智能驾驶功能的上车成本,为更多用户带来更安全、更易用的智驾体验。
审核编辑:刘清
-
百度
+关注
关注
9文章
2270浏览量
90454 -
智能驾驶
+关注
关注
3文章
2532浏览量
48795 -
ai技术
+关注
关注
1文章
1279浏览量
24340
原文标题:荣获「年度智驾系统」,百度Apollo City Driving Max引领高阶智驾新篇章
文章出处:【微信号:baiduidg,微信公众号:Apollo智能驾驶】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
百度Apollo开放平台10.0正式发布
百度获香港首个自动驾驶先导牌照
宏景智驾荣获2024年度TOP50智能汽车硬科技创新奖
百度计划海外推出萝卜快跑无人驾驶服务
供应商网2024年荣获百度联盟-创领风华奖
禾赛科技独供百度Apollo新一代无人车主激光雷达
2024百度移动生态万象大会:百度新搜索11%内容已AI生成
百度携手江铃新能源推出第六代Robotaxi车型
百度发布全球首个L4级自动驾驶大模型
百度Apollo计划年内部署千台无人车
百度发布全球首个L4级自动驾驶大模型Apollo ADFM
百度自动驾驶萝卜快跑入选“2023年度中国车谷经济高质量发展企业”
百度王云鹏:自动驾驶终于迎来“曙光初现”
百度Apollo荣获「年度智能驾驶企业」大奖引领高阶智驾新时代





 工商网监
工商网监
评论