 智能变电站智能集中控制系统及轨道机器人集成设计解决方案
智能变电站智能集中控制系统及轨道机器人集成设计解决方案
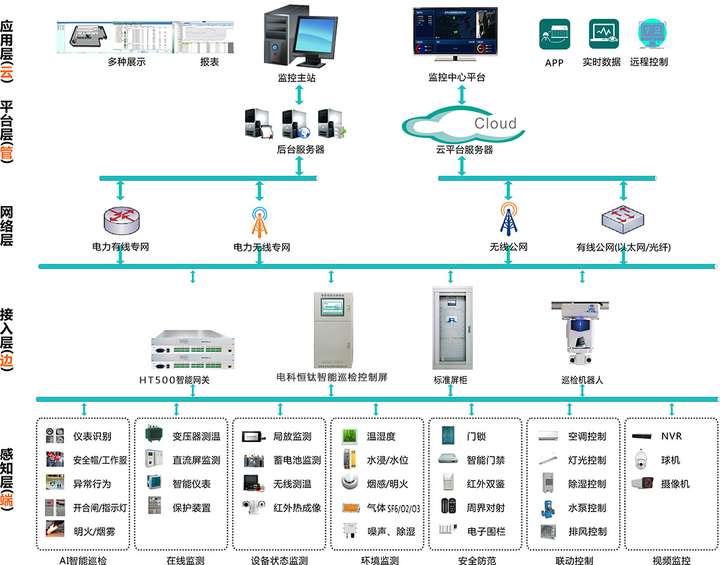
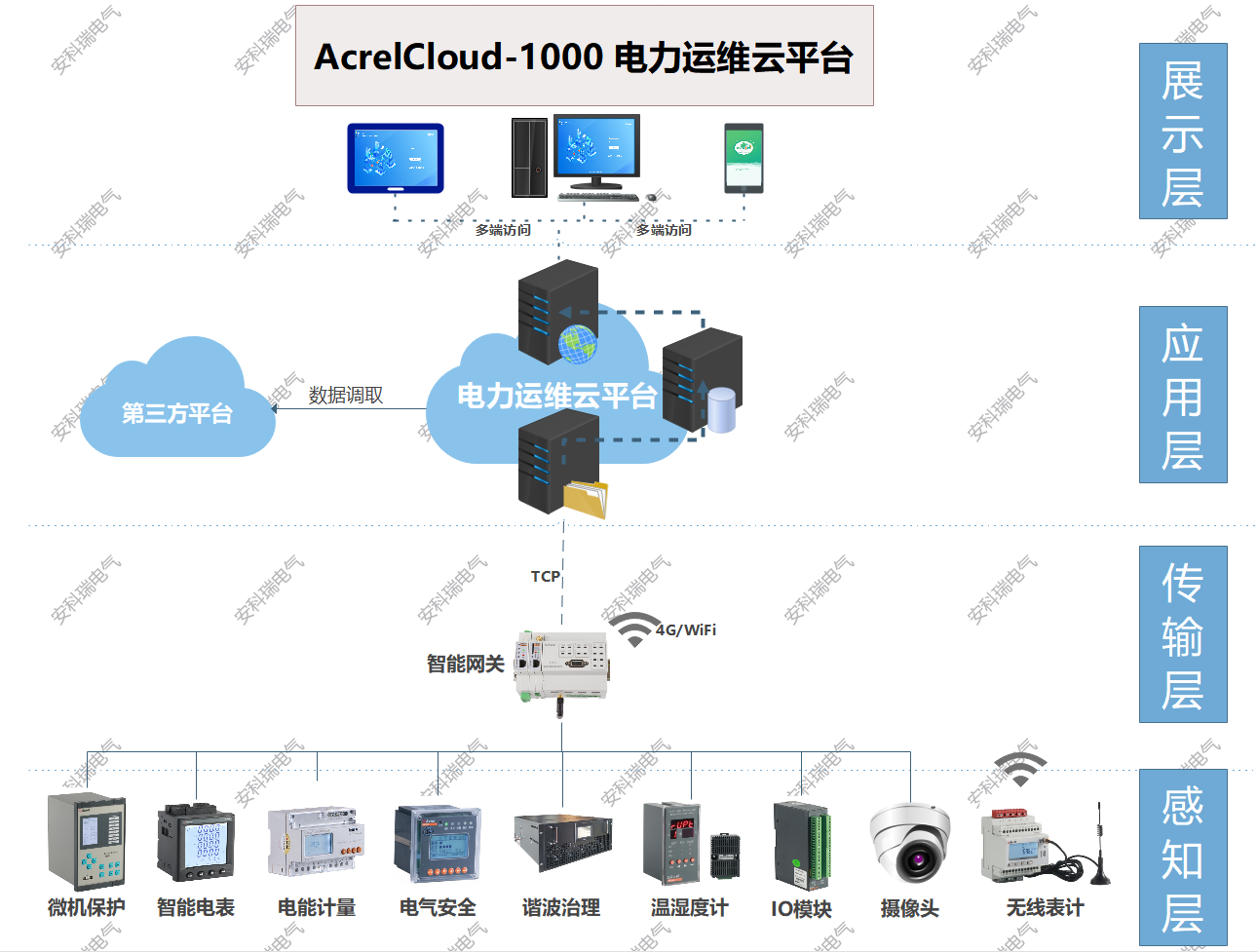
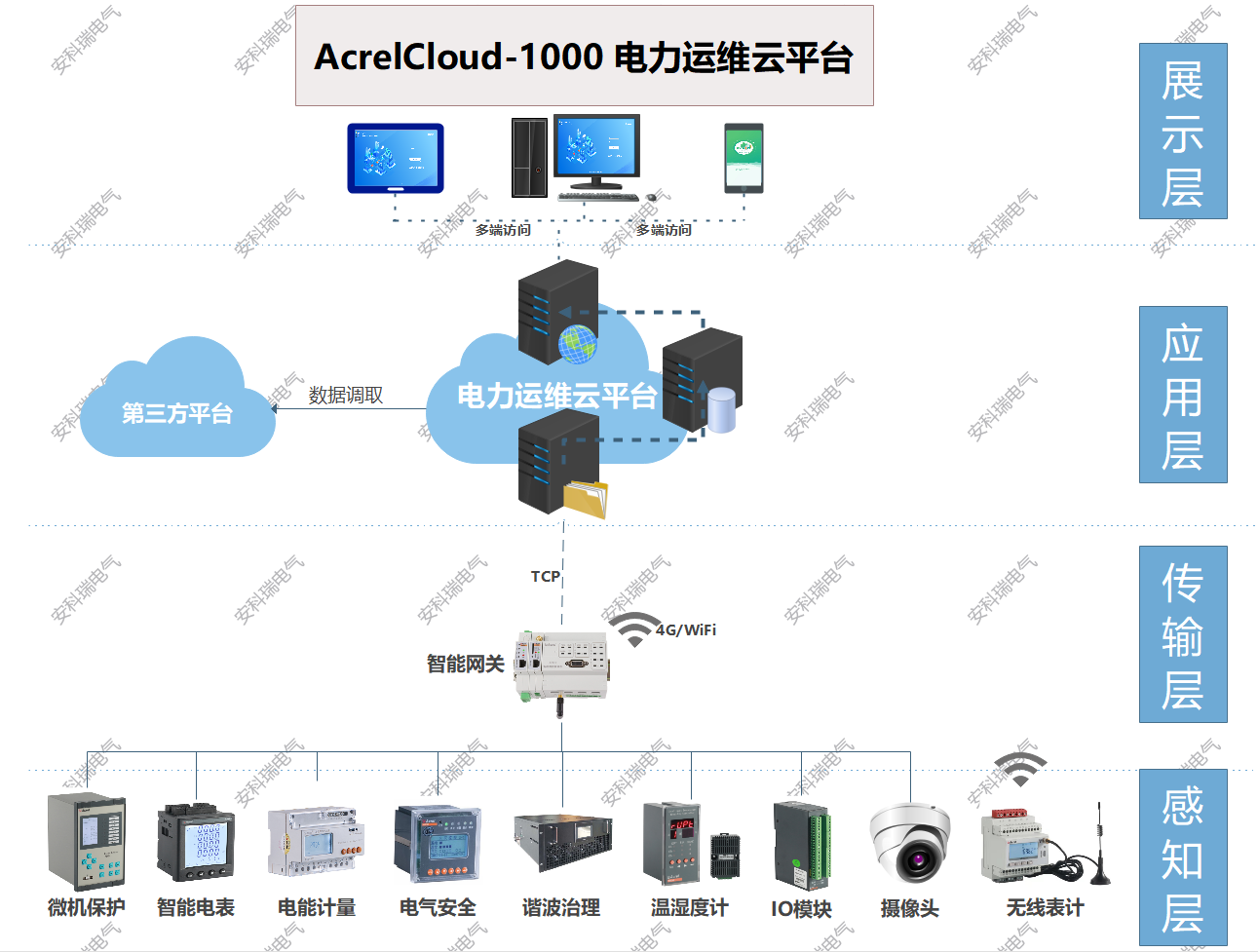
一、系统架构设计
1. 智能集中控制系统架构:
- 远程监控层:负责与上级调度中心通信,接收指令和发送数据。
- 站控层:实现对变电站内设备的监控和管理,包括数据采集、设备控制、运行策略制定等。
- 设备层:直接与变电站设备相连,进行实时数据采集和控制命令的执行。
2. 轨道机器人架构:
- 驱动模块:包括电机、传动装置等,实现机器人在轨道上的移动。
- 检测模块:包括传感器、摄像头等,用于对设备状态的检测和数据采集。
- 维护模块:包括工具和机械臂等,用于设备的维修和保养。
二、系统功能
1. 数据采集与处理:实时采集变电站内设备的运行数据,进行处理和存储,为集中控制提供数据支持。
2. 设备监控:通过集中控制系统实现对变电站内设备的实时监控,包括状态显示、报警提示等。
3. 运行管理:根据实时数据和预设策略,对变电站的运行状态进行分析和调整,优化运行效率。
4. 安全防护:通过轨道机器人进行安全隐患的实时排查,确保变电站的安全运行。
三、集中控制系统与轨道机器人的结合特点
1. 协同作业:集中控制系统与轨道机器人之间实现数据和指令的实时交互,协同完成设备监控和维护任务。
2. 自动化与智能化:轨道机器人能够自动执行检测和维护任务,减少人工干预,提高作业效率和安全性。
3. 模块化设计:系统采用模块化设计,可根据实际需求进行功能定制和扩展,适应变电站的不断发展。
4. 远程控制与现场操作相结合:集中控制系统可实现远程监控和控制,同时轨道机器人具备现场操作能力,确保变电站运行的实时性和可靠性。
四、结论
智能变电站智能集中控制系统及轨道机器人的集成设计解决方案,通过系统架构设计、功能划分和结合特点的阐述,形成了一个高效、安全、可靠的变电站运行管理模式。该方案充分利用了智能化技术和自动化设备,提高了变电站的运行效率和安全性,为我国电力事业的发展提供了有力支持。
审核编辑 黄宇
-
变电站
+关注
关注
7文章
1273浏览量
42635 -
控制系统
+关注
关注
41文章
6694浏览量
111152 -
机器人
+关注
关注
212文章
28892浏览量
209545
发布评论请先 登录
相关推荐
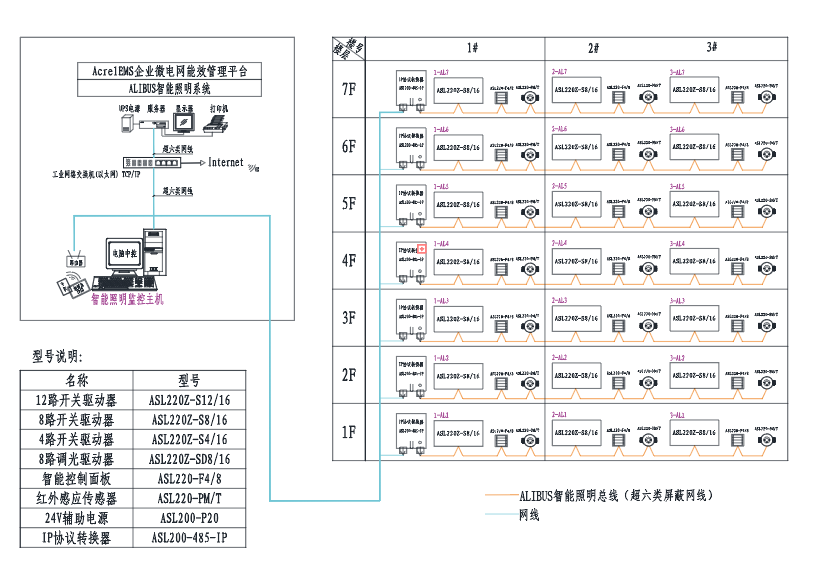
浅谈变电站智能照明控制系统设计研究
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
智能变电站难题揭秘:运维问题全解析!--安科瑞张田田

【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
变电站巡检机器人:电力行业智能化转型的关键工具

变电站无人值守化管理 如何运维呢
变电站智能巡检机器人解决方案

智能变电站集中监控辅助决策系统配置原则

智能变电站变电运维安全与设备的维护
智能变电站远程监控解决方案
变电站智能巡检机器人的应用领域?

浅谈智能变电站运维管理平台的安全与设备维护





 工商网监
工商网监
评论