 步进电机的微步驱动原理是什么
步进电机的微步驱动原理是什么
微步驱动(Microstepping)是一种细分步进电机步距的技术,允许电机以比全步进更小的增量进行旋转。这种技术利用了电流控制,以产生介于两个全步位置之间的中间磁场状态。结果是,电机可以更平滑地移动,并能够实现更精确的定位。
微步驱动原理的核心在于对绕组电流的精细控制。在传统的步进电机操作中,绕组通常被全开或全关,对应于一个特定的极性方向,从而产生足够的力矩使电机转到下一个步距角。然而,在微步驱动模式下,控制器会将电流分成多个级别(或“微步”),而不是全开或全关。
步进电机的微步驱动技术主要带来两个显著的优势:其一,它能够实现极精细的角度控制;其二,它有助于减少在低速运行时的振动与噪声。当步进电机完成一步移动时,通常会发生阻尼振动,并在多次超调和欠调之后最终稳定在预定位置。特别是在低速情况下,这种阻尼振动可能更为明显,导致不必要的振动和噪声问题。通过减小步距角,可以有效抑制这种阻尼振动。而微步驱动正通过细分步进角度来实现这一目标,从而在低速运动时显著降低振动和噪声水平。
以下是微步驱动技术的详细解释:
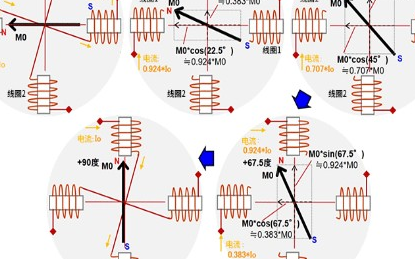
1. 电流细分:微步驱动器将电机绕组的最大电流划分为多个级别。例如,如果驱动器支持16个微步,则意味着电流有16个不同的级别,从0%到100%。
2. 磁场控制:通过调节电流,微步驱动器可以控制电机内磁场的大小和方向。这允许转子在每个全步距之间进行更细小的调整。
3. 平滑运动:由于转子移动的每一步都变小了,因此整体运动变得更加平滑,振动和噪音也相应减少。
4. 增强分辨率:微步进技术提高了系统的分辨率。例如,如果一个步进电机的物理步距角是1.8度,使用16个微步,它的分辨率就可以提高到0.1125度(1.8度 / 16)。
5. 力矩波动:在全步进模式下,转矩会在每一步有一个较大的波动。微步进可以使转矩波动减小,因为磁场和转子位置的变化更加连续和均匀。
总结来说,微步驱动是一种先进的步进电机控制技术,它通过在电机绕组中实施精确的电流控制来细分步距。这项技术不仅提高了步进电机的运动平滑度和定位精度,还降低了噪音和振动,且有助于更好地管理电机热量。尽管微步驱动器增加了系统的复杂度和成本,但它们在高精度和高性能的应用中提供了显著的优势。
-
电动机
+关注
关注
75文章
4128浏览量
96995 -
步进电机
+关注
关注
151文章
3120浏览量
147820 -
微步驱动
+关注
关注
0文章
2浏览量
5687
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论