 什么是CAN的BUS-OFF,如何恢复BUS-OFF?
什么是CAN的BUS-OFF,如何恢复BUS-OFF?
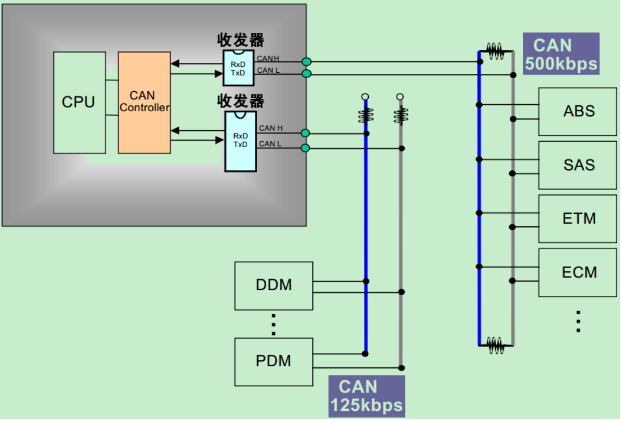
CAN作为一款强大的工业总线,其高性能和高可靠性让其应用特别广泛。一个小知识:汽车里面各个模块之间的通讯就是使用CAN来实现的哦。
既然是总线,那当然会有多个设备挂载在CAN上,当一个设备在发送数据的时候,其他设备也没有在闲着,它们会对接收到的数据格式进行解析,一旦发现有错误就会发送错误信号到总线上。
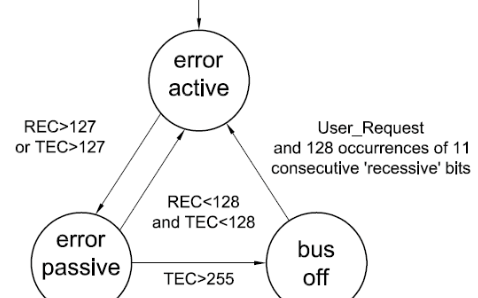
那么,如果一个设备确实出现了问题,老是发出错误格式的帧(比如波特率有偏差等等)怎么办呢?嘿嘿,不等大家把它踢出局,它自己就会老老实实的退出总线,不再往总线上发数据了,这个就叫做BUS-OFF,也就是设备离线。
那么MCU如何触发这个BUS-OFF呢?我们以GD32F303为例来说明。GD32F303的CAN在发送一次错误的帧后,会将发送错误计数器的值+1,当这个计数值达到255时,就会触发BUS-OFF机制,退出总线。
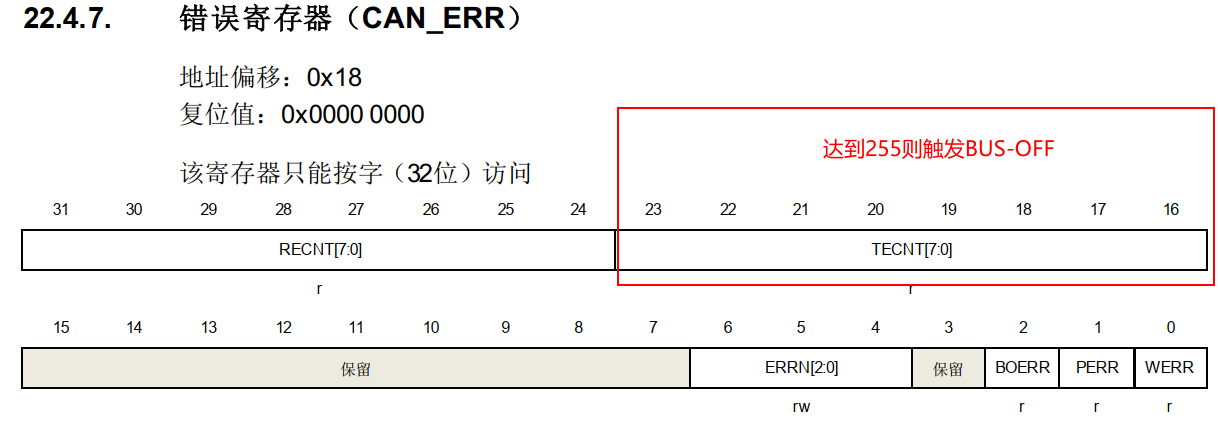
这个时候有的小伙伴就会问了,一个设备运行很长时间,总会有发送错误的时候吧,如果就这么退出总线了,岂不是太冤了?其实不是的,当设备在发送错误计数器的值不等于0的情况下,发送一次正确的帧,这个计数值会-1的。
当一个设备BUS-OFF了,但它自恢复了错误状态,想继续回到总线上怎么操作呢?有两种方式:
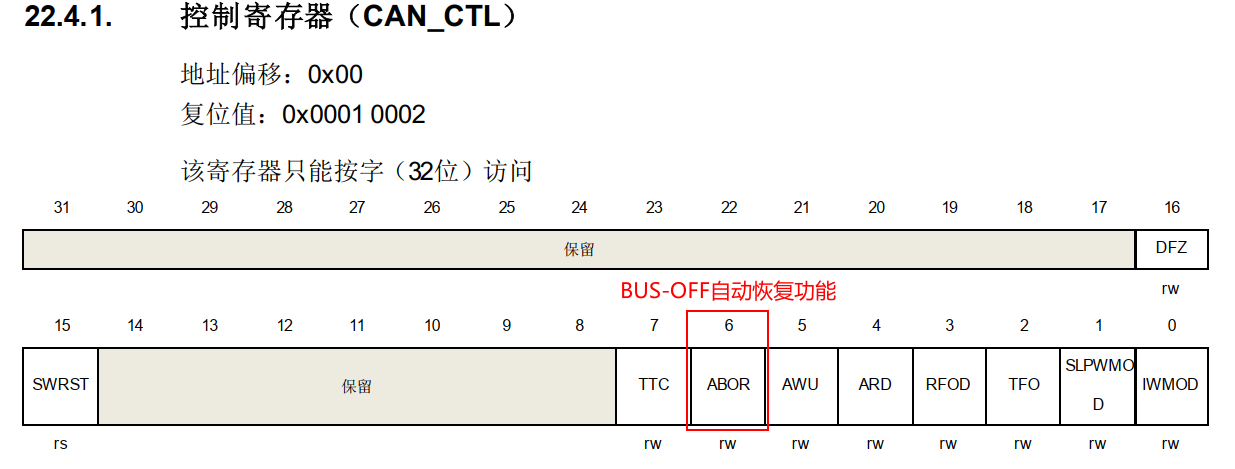
1、打开GD32F303的离线自动恢复功能,当出现BUS-OFF,MCU在检测到离线恢复序列(在CAN_RX检测到128次连续11个位的隐性位 )后就会自动恢复。
2、如果没打开自动恢复功能,则需要让CAN进入到初始化模式,再进入正常工作模式即可。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6035文章
44554浏览量
634583 -
嵌入式
+关注
关注
5082文章
19104浏览量
304777 -
CAN
+关注
关注
57文章
2744浏览量
463606 -
汽车业
+关注
关注
0文章
18浏览量
3293
发布评论请先 登录
相关推荐
CAN控制器总线错误分析之CAN节点BusOff恢复过程分析与测试
“ 总线关闭(bus off)是CAN节点比较重要的错误处理机制。那么,在总线关闭状态下,CAN节点的恢复流程是怎样的?又该如何理解节点
发表于 08-04 11:16
•1.5w次阅读
将TC397的MCMCAN模块的canh和canl短接到GND,MCMCAN模块进入到bus off状态后无法继续正常发送的原因?
将TC397的MCMCAN模块的canh和canl短接到GND。按照网络上的资料:此时CAN总线会进入到bus off状态,但当故障移除后即通信线正常连接后,CAN模块会
发表于 02-01 07:21
CYT2B75CAD CAN的bus off状态如何检测的?
使用芯片为:CYT2B75CAD,CAN的bus off状态如何检测的,CAN的错误以及发送完成等?是否有相关例程可以参考?
发表于 02-02 08:36

STM32之CAN---错误管理分析
bus-off state only upon a user request.由于错误界定规则,一个节点可能处于离线状态,当处于此状态时,这个节点既不发送也不接收。至于何时离线恢复取决于何时用户请求。2
发表于 03-20 13:48
在总线关闭状态下手动重启CAN
controllers in a PSoC 4200L.The datasheet for the component says that when the Bus-off restart option
发表于 10-24 16:47
请问NUC240 CAN bus遇到bus-off如何自动恢复?
各位大大安安,我在BSP中CAN范例遇到CAN bus中断进到bus-off状态问题,导至message无法传送,想问除了重新上电复位之外,如何初始化让
发表于 08-21 06:04
CAN-BUS,CAN-BUS是什么意思
CAN-BUS,CAN-BUS是什么意思
CAN-BUS 1,CAN-BUS的起源 控制器局域网(controllerareanetwork 简称
发表于 03-11 15:31
•1.8w次阅读
CAN-BUS,CAN-BUS原理是什么?
CAN-BUS,CAN-BUS原理是什么? 1,CAN-BUS的起源 控制器局域网(controllerareanetwork 简称CAN)最初是德国Bosch公司于1983年为汽
发表于 03-22 15:51
•2663次阅读
CAN总线Bus Off原理及恢复解决方案
除了物理层线路因素,还有可能因为CAN控制器或收发器等元器件故障导致。同时,也有可能是由于CAN总线信号干扰导致的CAN信号收发不正确,严重时会导致不能正常发送报文,从而更容易导致CAN
CAN总线Bus Off原理及CAN总线Bus Off恢复的解决方案
汽车内部挂有很多的ECU节点,当其中一个节点发生故障进入总线关闭状态时,会很大程度上影响整车CAN网络的通讯。
发表于 01-04 11:34
•8890次阅读





 工商网监
工商网监
评论