 RENISHAW雷尼绍双读数头系统应用分享
RENISHAW雷尼绍双读数头系统应用分享
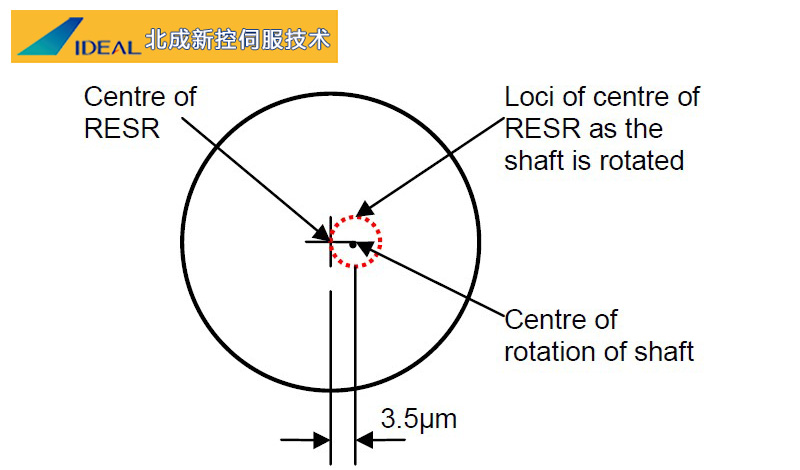
在精密回转运动控制中,大多数场合都会对系统的回转定位精度有严格的要求,RENISHAW雷尼绍圆光栅系统(RESM增量和RESA绝对值)对于回转角度的反馈测量方案能有效的解决运动控制对回转精度的需求。但是配置单个读数头的圆光栅系统的精度可能会受到偏心和轴承旋转中心的平移的强烈影响。
如下计算过程引用自雷尼绍官方文件(L-9517-4532-02-A)
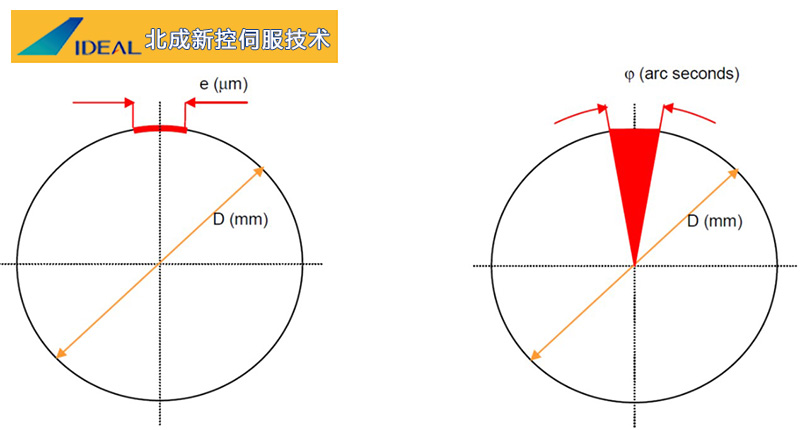
在直径为D(单位mm)的圆环上,弧长e(单位um)对应的角度值ϕ(单位arc senconds)

举例如下:如果209mm直径的圆光栅在安装的时候出现了3.5um的误差,将对系统造成412.5x3.5/209约等于±7arcsencond的系统误差,不过这个偏心误差是一个可重复的误差,因此可以进行补偿。
补偿的方式除了对机械安装的调整,控制器增加补偿程序外,还有一种直接的方法就是在同一旋转标尺上使用两个径向相对的读数头。两个读头的使用可以有效的消除偏心误差,还可以消除所有“奇数”误差谐波,如三叶性(每转3圈的误差分量)。然而,并不是所有的误差谐波都可以通过使用两个读头来消除。椭圆度(每转2次分量)和拟圆度(每旋转4次分量)不能进行补偿。
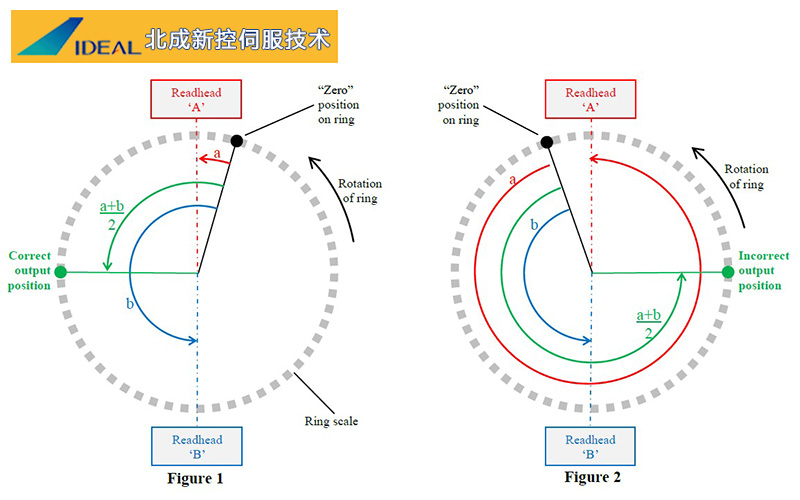
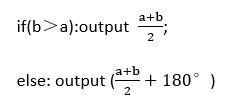
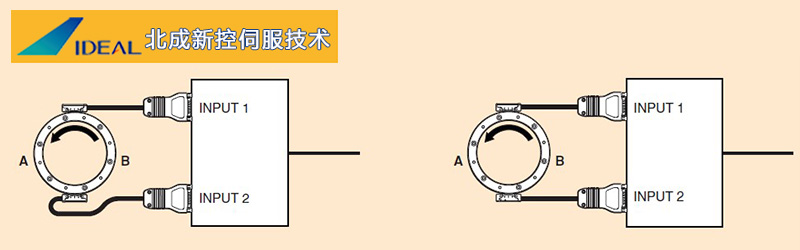
以增量光栅为例,双读数径向对装,两个读数头信号在控制器内组合。一种方法是通过将正交计数加在一起使用,这样可以使圆光栅的表观分辨率增加一倍。另外一种就是把两个数据在软件中进行组合,可以通过建模保证输出角度始终在0°到360°范围内:
RENISHAW雷尼绍也有专门针对该方案的双读数头Dsi接口,匹配TONIC读数头系统将两路读数头信号组合成一路对控制端输出数据:
北京北成新控伺服技术——台湾apex减速机,ABB伺服电机、变频器,日本哈默纳科减速机、执行元件北京核心代理商!提供人机界面,运动控制,交直流驱动,机械传动,光栅测量成套运动控制技术解决方案!
-
伺服
+关注
关注
16文章
650浏览量
40952 -
运动控制
+关注
关注
4文章
579浏览量
32857
发布评论请先 登录
相关推荐
光电轴角编码器和读数头的区别

尼得科汽车领域电机产品反映什么发展趋势?
尼得科推出新型汽车空气悬挂系统电机
尼得科新推出用于汽车空气悬挂系统的电机产品
雷尼绍测头为什么具有各向同性
电压表的读数方法 电压表的读数步骤是什么?
小米电视新品现已上架,65英寸可达200-300尼特亮度
水尺读数监测识别摄像机

雷尼绍 VIONiC高精度测量反馈产品助力高精度运动控制系统

renishaw雷尼绍FORTiS-S™标准型封闭式直线光栅






 工商网监
工商网监
评论