 冗余电动助力转向系统EPS的发展路径和关键技术介绍
冗余电动助力转向系统EPS的发展路径和关键技术介绍

引言
在乘用车领域,电动助力转向系统(Electric Power Steering,EPS)相比传统的液压助力转向系统(Hydraulic Power Steering,HPS)具有结构简单、响应迅速、能耗低等优点,因此应用很广。随着智能驾驶的发展,作为底层执行系统的电动助力转向系统(EPS)也迎来了新的机遇与挑战。为了满足L3级以上自动驾驶的需求,同时提升智能驾驶的驾驶体验、安全性、可靠性等,要求电动助力转向系统(EPS)在发生单点失效的情况下,依然具备一定的助力能力。因此,冗余电动助力转向系统,即冗余EPS,成为L3级以上智能驾驶系统的关键零部件。本文主要介绍冗余EPS的发展路径和关键技术。
一、转向技术发展路径
转向系统是汽车底盘的关键部件之一,对于汽车的操稳性、安全性、舒适性起到至关重要的作用。随着汽车工业电动化的深入,转向系统经历了从机械转向系统(MS)、机械液压转向助力系统(HPS)到电子液压助力转向系统(EHPS)、电动助力转向系统(EPS)的发展历程。相比机械和液压转向系统,电动助力转向系统(EPS)的结构更加简单、助力控制响应更快,同时能耗也更低,而且不需要保养和维护,大大提升了用户的驾驶体验。汽车工业电动化的同时,智能化成为了转向技术发展新的驱动力。为了更好地满足自动驾驶的需求,转向系统需要有更高的安全性和可靠性,从而保证转向系统在出现电气系统故障的时候整车仍然可以进入安全状态甚至继续安全驾驶。因此,冗余EPS、线控转向系统(SBW)开始进入人们的视野。其中线控转向(SBW)相比冗余EPS最大区别在于方向盘和执行机构之间无机械连接,因此在成本控制、设计灵活性、功能丰富性、空间布置等方面具有明显优势。
转向系统作为底盘核心零部件,具有很高的技术壁垒。我国汽车工业起步相对较晚,因此当前德国、美国、日本、韩国的供应商巨头仍然占据着转向系统的大部分市场,尤其是冗余EPS和线控转向系统,国内仍然处于追赶的状态。但是随着国内汽车产业链的日渐成熟,一些企业也开始逐步掌握转向系统的核心技术,未来有望快速提升所占的市场份额。
二、冗余EPS技术方案
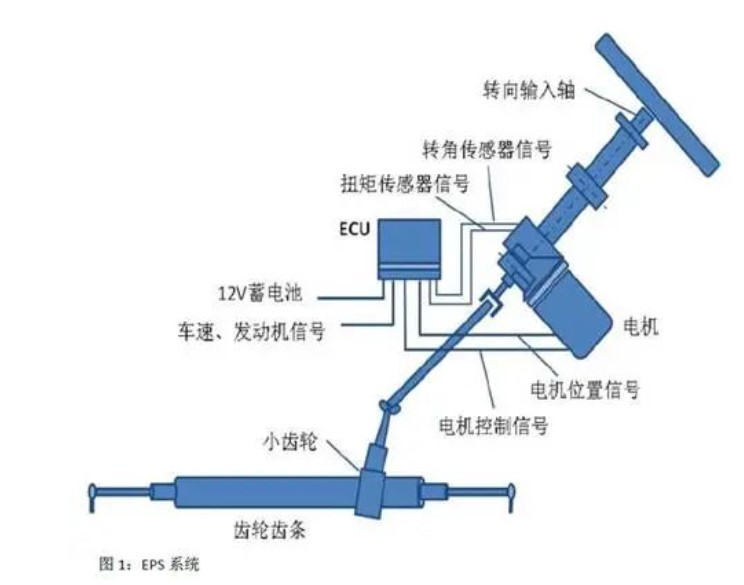
冗余EPS系统主要由机械系统部件、转矩转角传感器总成(TAS)以及电控单元(Powerpack)组成,如图2-1所示。以皮带传动齿条助力转向系统(R-EPS)为例,机械系统主要由齿轮齿条副、滚珠丝杠传动机构、皮带传动单元、转向横拉杆等组成。可支持的最大齿条力达到16kN以上,能够满足豪华轿车、SUV以及商务车的要求。转矩转角传感器总成用于检测转向扭矩和方向盘转角,主流的冗余传感器方案通常能够提供4路转矩信号和2路转角信号,显著提升了安全性。电控单元是冗余EPS的核心部分,由助力电机以及驱动和控制单元组成,助力电机通常采用六相或十二相无刷直流电机,由于单点失效导致其中三相无法正常驱动时,剩余部分仍可正常工作,为转向系统提供助力。驱动和控制单元集成在电机的后端,由驱动板、控制板、散热器、外壳等组成。
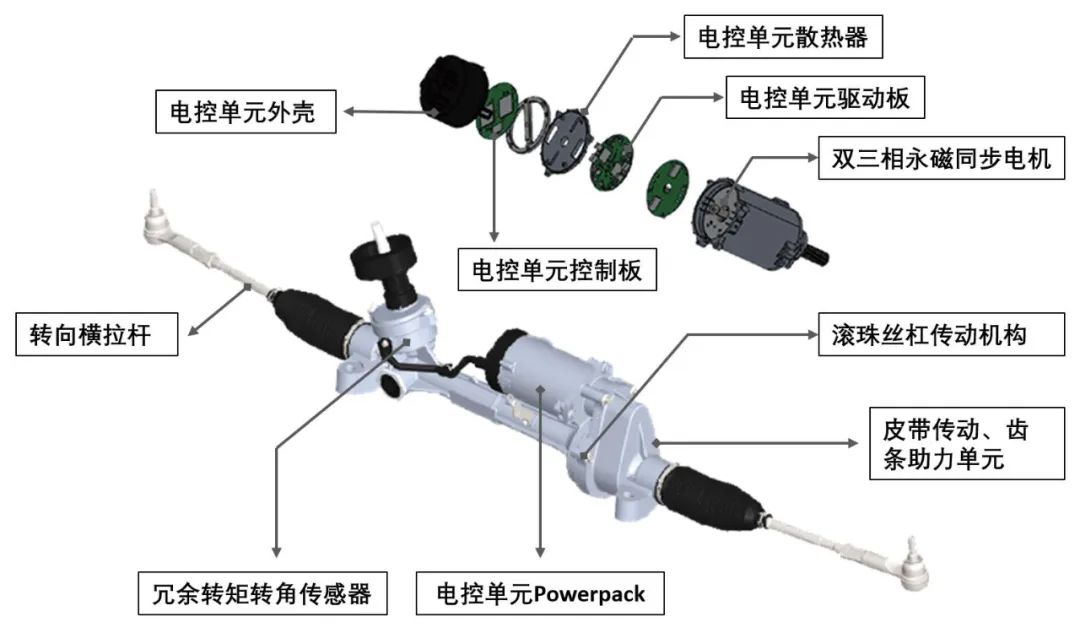
图2-1 冗余EPS系统方案示意图
基于双三相无刷直流电机的全冗余电控方案如图2-2所示,整个方案采用了双路独立外部供电、双路外部CAN/CANFD通信以及冗余的转矩、转角传感器信号。电机驱动单元、电机位置传感器、电源管理单元、主控MCU也都采用了双备份的冗余架构。主控MCU采用带锁步核的32位芯片,具有较高的算力,同时最高支持ASIL-D功能安全等级。双MCU之间采用CANFD通信,实现信号交互、力矩指令传递、故障诊断信号交互等,可以起到相互监控的作用,必要时支持主辅切换,提升了整个系统的安全性和可靠性。
根据《GB/T 40429-2021 汽车驾驶自动化分级》对于L3级自动驾驶的定义,车辆在有条件设计运行范围内运行,允许驾驶员注意力离开驾驶任务,但是在系统提示需要接管的时候应该进行适当的响应。基于上述冗余方案,电气系统在出现单点失效的场景下,最多损失50%的助力能力,因此对于大部分限定条件下的L3级自动驾驶功能,能够保证整车在系统提示接管到驾驶员完成阶段的时间段处于安全状态。
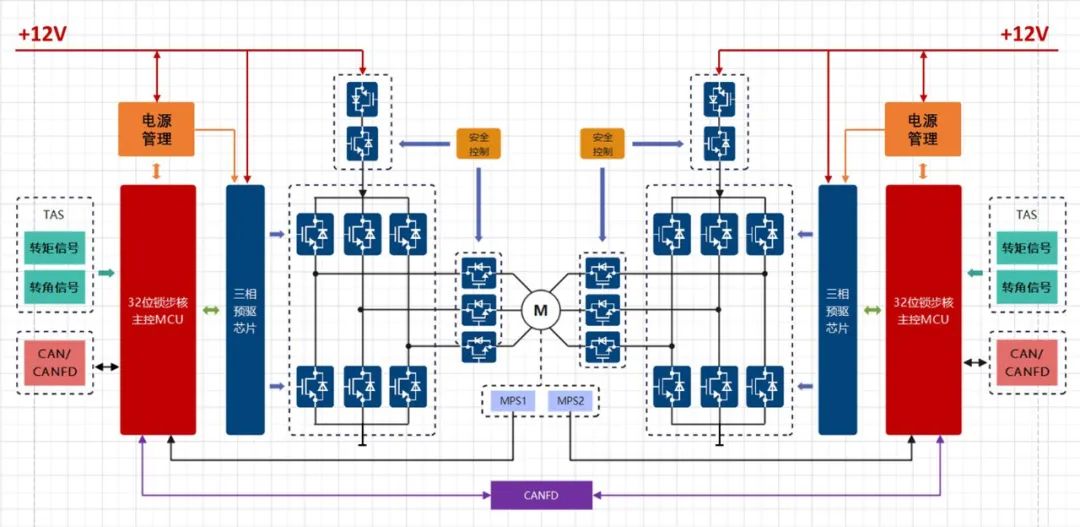
图2-2 冗余EPS电控方案示意图
三、冗余EPS关键技术
3.1 冗余策略与安全机制
如图3-1所示为冗余EPS的双MCU架构。双MCU(ECU A和ECU B)都实现完整控制功能,上电初始化后默认分配主从角色。正常工作状态下,双系统均进行力矩指令计算,但是从系统响应主系统分配的扭矩指令。如果系统发生单点失效,双MCU根据故障诊断与处理机制判断是否进行主从切换,必要时从系统切换为主系统。
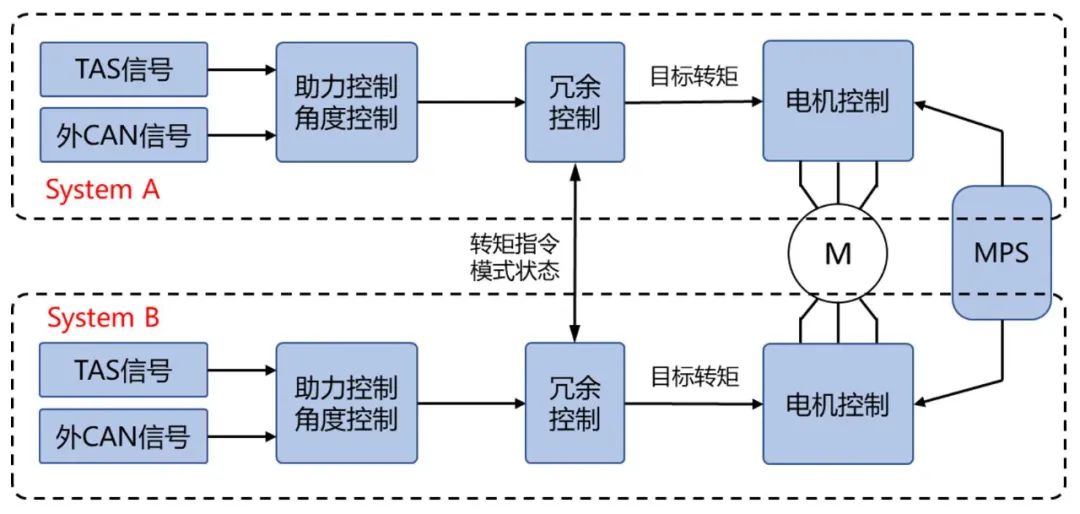
图3-1 冗余策略与安全机制示意图
3.2 基础助力算法
基础助力算法的主要作用是为驾驶员提供助力同时保证驾驶员具有良好的驾驶手感,其算法架构如图3-2所示。
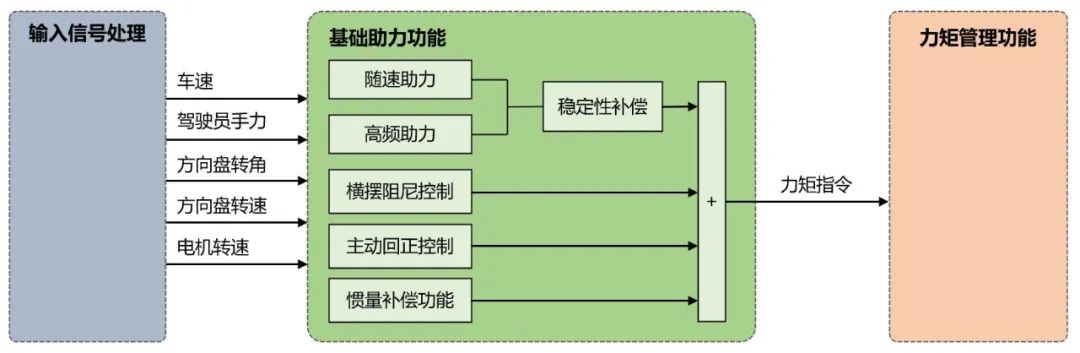
图3-2 基础助力算法架构
基础助力算法包含随速助力、高频助力、稳定性补偿、横摆阻尼控制、主动回正控制以及惯量补偿等模块,各个算法模块作用如下:
随速助力:提供随车速变化的助力,提供驾驶员中间位置感觉,中心区域到两侧要使驾驶员有力的建立的感觉;
高频助力:能够消除系统的惯性,减少粘性和提高应答性,并消除反向或快速转向时的助力延迟;
稳定性补偿:在低频段保持真实的手感;中频段降低系统增益,防止系统共振;高频段提升系统的相位裕度,增加稳定性和快速性。
横摆阻尼控制:增加系统的稳定性,防止方向盘在回正过程中出现“摇头”现象。
主动回正控制:主动回正控制在车速较低时给系统一个额外的回正力,提升驾驶员的驾驶体验。
惯量补偿控制:计算电机惯量补偿力矩,并叠加到助力力矩上,使得电机的惯量不影响转向手感。
3.3 高级助力功能
高级助力功能在基础助力的基础上进一步提升驾驶的舒适性以及安全性,高级助力算法架构如图3-3所示。
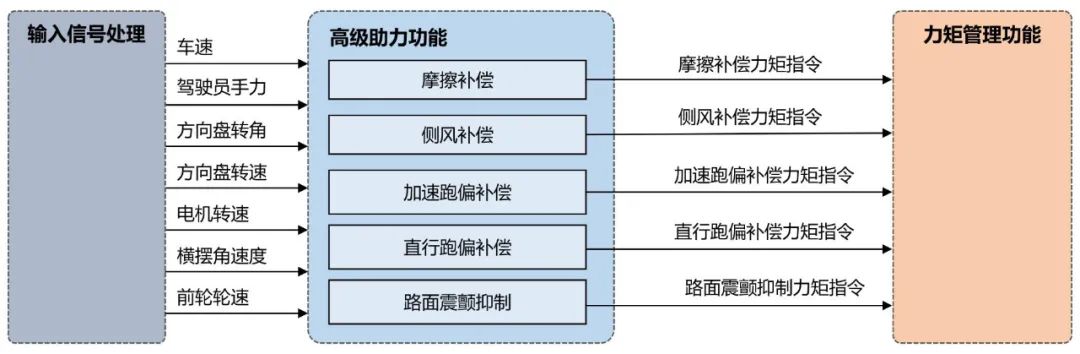
图3-3 高级助力算法架构
高级助力算法包含摩擦补偿模块、侧风补偿模块、加速跑偏补偿模块、直行跑偏补偿模块、路面震颤抑制模块等,各个算法模块的作用如下:
摩擦补偿:摩擦补偿功能来弥补转向系统产生的摩擦从而保证转向力的舒适性;补偿目标和当前转向感觉之间的差异。
侧风补偿:遇到较强侧风时,应具有保证车辆稳定直线行驶的能力,防止侧风导致车辆发生偏转而偏离直线行驶轨迹。
加速跑偏补偿:急加速的过程中,左右车轮上的牵引力不一致导致行驶跑偏的时候,通过补偿来保持直线行驶。
直行跑偏补偿:正常直行过程中如果存在一定的跑偏现象,可以通过直行跑偏补偿进行适当缓解。
路面震颤抑制:路面震颤抑制算法检测轮速信号,同时对手盘力矩中与轮速频率正相关的频率特征进行提取后,在最终施加给电机的力矩中减掉这一频率特征信号与路面震颤进行抵消,从而达到抑制的目的。
3.4 外部请求控制
冗余EPS的外部请求控制功能包含自动驾驶相关的功能以及底盘稳定性相关的功能。自动驾驶相关的功能有转矩叠加控制(Torque Overlay)、转角叠加控制(Angle Overlay)、绝对转角控制、泊车转角控制、方向盘振动提醒等,底盘稳定性相关的功能包含Driver Steering Recommendation(DSR)功能。不同功能的原理介绍如下:
转矩叠加控制:能够响应智能驾驶控制器要求的叠加扭矩,实现如车道保持辅助(LKA)等高级驾驶辅助(ADAS)功能。转向系统的转矩叠加控制算法需要系统兼顾ADAS功能的安全作用和混合驾驶舒适性。
转角叠加控制:能够响应智能驾驶控制器要求的角度跟踪指令,并在EPS内部通过合理的计算转化为叠加扭矩指令。基于转角叠加控制实现的LKA功能能够更好地实现车道线跟踪的效果,进一步降低驾驶员的驾驶压力。作为ADAS功能的接口,转角叠加控制功能同样需要兼顾ADAS功能的安全作用和混合驾驶舒适性。
自动驾驶转角控制:L3+自动驾驶场景允许驾驶员的双手离开方向盘,此时转向系统通过自动驾驶转角控制功能来精确、快速地响应智能驾驶控制器的目标转角指令,对于角度控制的精度要求很高。在此场景下,无需考虑混合驾驶的场景,但是需要保证驾驶员驾驶与自动驾驶状态切换过程的安全性和舒适性。
泊车转角控制:泊车转角控制用于智能驾驶的低速泊车场景,该场景下要求转向系统能够快速响应泊车控制器的目标转角指令。
DSR功能:该功能用于转向与制动系统的协调控制场景。当ESC检测到抱死或侧滑即将发生时,通知EPS施加一个力帮助驾驶员进行转向操作,可以有效的降低刹车距离、防止或减弱甩尾现象。
方向盘振动提醒:通过助力电机的高频振动来实现方向盘振动提醒功能,振动强度多档可调,可用于车道偏离预警等ADAS功能。

图3-4 外部请求控制功能
四、小结
冗余EPS已经成为当前L3+自动驾驶场景下的核心技术。相比传统的非冗余EPS,冗余EPS需要更加复杂的系统架构和更加复杂的功能来保证车辆的安全性、可靠性和驾驶体验,因此也有更高的技术壁垒。国际领先的供应商已经在该领域积累多年,国内的供应商也在积极追赶,相信未来能够为消费者提供更多安全、可靠、舒适的产品。
审核编辑:刘清
-
传感器
+关注
关注
2578文章
55811浏览量
795301 -
EPS
+关注
关注
7文章
209浏览量
33413 -
无刷直流电机
+关注
关注
61文章
744浏览量
49438 -
SBW
+关注
关注
1文章
10浏览量
12612 -
自动驾驶
+关注
关注
795文章
15055浏览量
181978
原文标题:L3自动驾驶的“双保险”:冗余EPS关键技术解析
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AMEYA360设计方案丨电动助力转向系统模块解决方案
电动助力转向EPS——理论公式推导及simulink模型
汽车电动助力转向系统(EPS)





评论