 差分编码器信号如何接plc
差分编码器信号如何接plc
差分编码器信号通常用于测量旋转运动或线性位置,接收差分编码器信号的PLC(可编程逻辑控制器)需要进行相应的信号处理才能正确读取并理解编码器的输出。下面是将差分编码器信号接入PLC的一般步骤:
1. 连接差分编码器信号线:
差分编码器通常会有A相、B相和Z相等多个信号线用来输出位置信息。将编码器的A、B、Z相信号分别连接到PLC的对应输入端口。
2. 配置PLC输入端口:
在PLC的编程软件中,配置输入端口以接收差分编码器信号。需要指定每个输入端口对应的信号类型(脉冲信号或方向信号等)以及工作方式(上升沿触发或下降沿触发等)。
3. 编写PLC程序:
在PLC的编程软件中编写程序,以处理差分编码器信号。根据编码器的输出信号类型和工作方式,编写逻辑以正确读取并解析编码器的信号。
4. 信号处理:
接收差分编码器信号后,PLC通常需要进行信号处理,包括计数、方向识别、位置跟踪等操作,以实现对位置信息的准确获取。
5. 反馈控制:
在某些应用中,PLC还可以根据差分编码器信号的反馈信息实现位置控制或运动控制。编写相应的逻辑算法,实现对机器或设备的位置、速度控制等功能。
通过以上步骤,PLC可以正确接收、处理和利用差分编码器信号,实现对位置信息的准确获取和控制。在实际应用中,根据具体的差分编码器规格和PLC型号,可能会有细微的差异,需要根据具体情况进行相应的设置和处理。
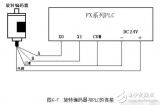
差分编码器接线原理
差分编码器(Differential Encoder)是一种用于测量旋转运动或线性位置的传感器,它通过输出两路相位差为90度的脉冲信号来反映位置的变化。接下来我将介绍差分编码器的接线原理:
差分编码器通常有三个信号线:A 相信号线、B 相信号线和 Z 相信号线。其中,A 相和 B 相信号线是两路相位差为90度的正交信号,用于确定运动的方向和速度;Z 相信号线用于标记一个完整的运动周期,即位置的绝对值。
接线原理如下:
1. A 相和 B 相信号线接线:
- A 相信号线和 B 相信号线通常是差分编码器的主要输出信号,表示运动的相位和速度信息。
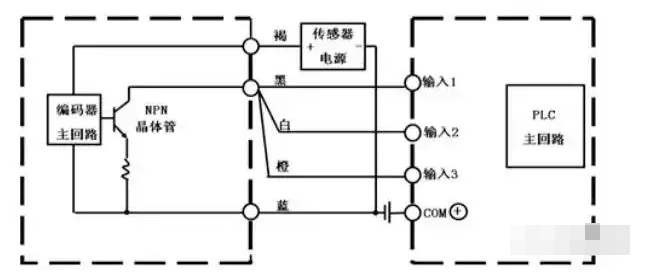
- 将 A 相信号线接到 PLC 或运动控制器的一个数字输入端口,将 B 相信号线接到另一个数字输入端口。
2. Z 相信号线接线:
- Z 相信号线通常用于标记一个完整的运动周期,用于确定位置的绝对值。
- 将 Z 相信号线接到 PLC 或运动控制器的一个数字输入端口。
3. 接地线连接:
- 差分编码器通常也需要接地线来确保信号的准确性和稳定性。
- 将编码器的接地线连接到 PLC 或控制器的接地端口。
4. 信号处理:
- PLC 或运动控制器需要进行对接收到的差分编码器信号进行适当的处理,包括信号滤波、计数、方向识别等操作,以获取准确的位置和速度信息。
通过以上接线原理,差分编码器可以将位置和运动信息准确地传输给 PLC 或运动控制器,实现对运动系统的监控和控制。接线前,请确保正确理解差分编码器的信号类型和编码原理,以便正确连接和信号处理。
差分编码器与编码器的区别
差分编码器(Differential Encoder)和普通编码器(Incremental Encoder)是两种常见的位置传感器,用于测量旋转运动或线性位置。它们在原理、输出方式和应用方面存在一些区别。
以下是差分编码器和编码器的主要区别:
1. 输出信号差异:
- 差分编码器输出的是差分信号,通常具有两个相位差为90度的信号,分别称为A相和B相。这两个信号相对于彼此的相对相位差可以表示位置的方向和速度。
- 编码器通常输出的是脉冲信号,根据所选的编码方式(例如,二进制或格雷码),编码器可以提供不同的脉冲组合来表示位置的变化。
2. 位置信息表示:
- 差分编码器通常只提供相对位置的信息,通过计算脉冲数量和方向来估算位置。差分编码器通常需要配合起始位置的标记信号(通常通过Z相信号实现)来确定位置的绝对值。
- 编码器可以提供相对位置和绝对位置的信息。某些编码器(如绝对光栅编码器)通过具有固定位置的独特编码模式来提供精确的绝对位置信息,而非只提供相对变化。
3. 应用领域:
- 差分编码器常用于某些控制系统,如步进电机驱动器,其中需要准确的速度和方向信息。
- 编码器在许多不同领域中得到广泛应用,例如自动化机械、机器人、车辆导航和位置跟踪等。
4. 误差消除:
- 差分编码器的差分信号相对于共模干扰更抗干扰能力强,对于干扰信号的排斥能力更好,从而提供了更高的信号可靠性。
- 编码器对于共模干扰方面可能较为敏感,可能需要额外的信号处理手段(如滤波)以消除噪声对信号的影响。
差分编码器通常用于需要准确的方向和速度信息的控制系统,而编码器则更常见,并且在许多不同的领域中得到广泛应用,提供相对位置和/或绝对位置的信息。
审核编辑:黄飞
-
传感器
+关注
关注
2552文章
51383浏览量
756361 -
编码器
+关注
关注
45文章
3664浏览量
135194 -
plc
+关注
关注
5016文章
13385浏览量
465184 -
运动控制器
+关注
关注
2文章
408浏览量
24804 -
信号处理
+关注
关注
48文章
1041浏览量
103388
发布评论请先 登录
相关推荐
2812如何接受差分编码器的信号?电路如何设计?

5V编码器差分信号转5V脉冲或集电极开路信号变送器







 工商网监
工商网监
评论