 Ansys Motion等速万向节刚柔耦合动力学仿真方案
Ansys Motion等速万向节刚柔耦合动力学仿真方案

1
前言
传统多体软件对于节点柔性体的刚柔耦合分析,需外接有限元求解器来求解结构变 形,因此用户体验割裂感较强,且额外的有限元求解器也增加了实际成本。Ansys Motion集成了多体求解器和基于有限元柔性体的结构求解器,将刚体和不同类型柔性体结合在同一系统中,求解中结合全局坐标系和相对坐标系概念,让刚柔耦合仿真达到以前难以实现的便捷程度。
Ansys Motion 支持节点柔性体和模态柔性体,对求解大自由度、大变形、非线性材料(超弹性材料)、高速运动以及边界条件发生剧烈变化的非线性接触问题有独特优势,Motion 针对不同应用场景开发多个接触模型(刚体-刚体,刚体-柔性体,柔性体-柔性体),利用隐式积分算法和专用于刚柔混合系统定制的稀疏矩阵,在求解非线性问题时保证了仿真结果的稳定和精度,完善的解决了传统动力学分析仿真结果收敛困难的痛点。
本文将介绍利用AnsysMotion进行等速万向节模型动力学仿真,重点介绍在motion中建立万向节模型的刚柔耦合动力学模型的步骤,在同一系统中同时使用节点柔性体和模态柔性体,从而提高求解效率。
2
利用Ansys Motion建立等速万向节动力学模型
目前,AnsysMotion有两个版本可使用,一个是在workbench平台Mechanical界面下运行,另一个是Motion独立版本,用户可根据习惯选择熟悉版本,本文以Motion独立版为例进行介绍。 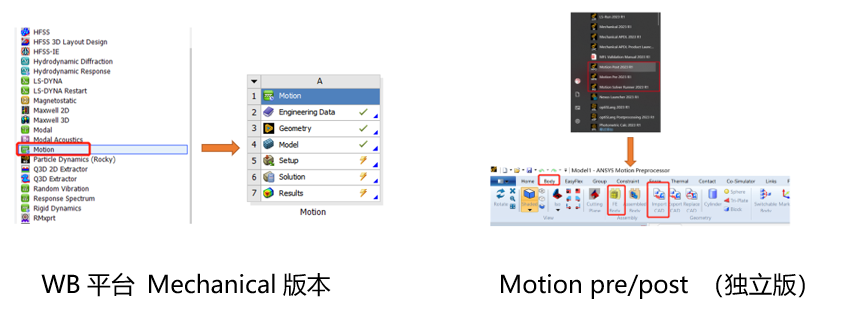
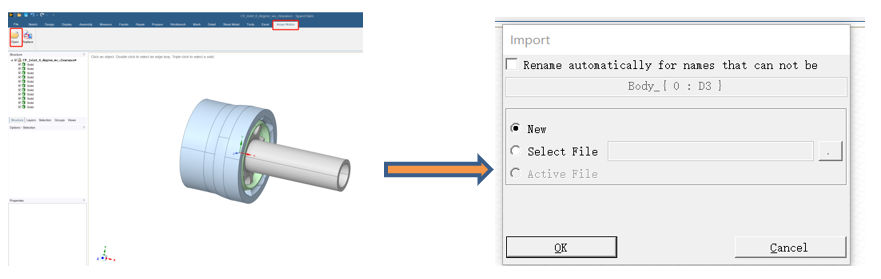
2.1 导入几何模型
SpaceClaim功能区集成Ansys Motion几何模型接口,可以将几何模型导入/替换Motion pre中的模型,可以自动打开Motion独立版界面。
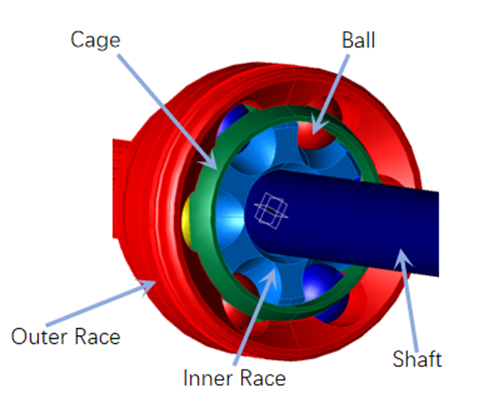
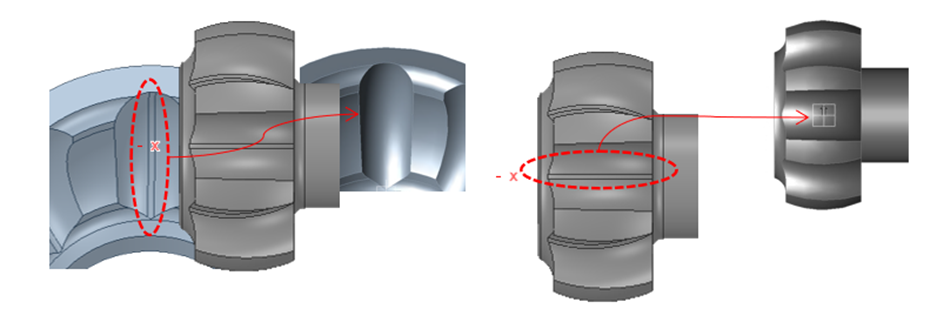
等速万向节由内/外滚道,保持架,轴,滚珠等组成
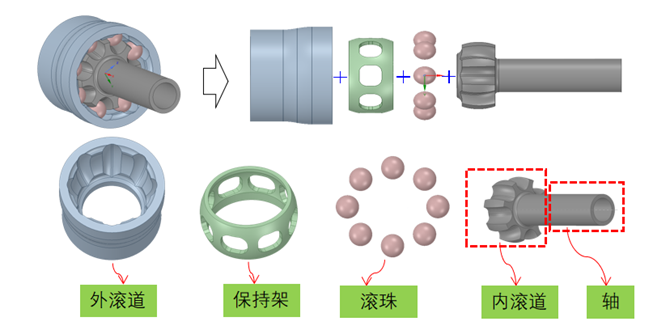
几何模型修改,边缘可能会产生意想不到的噪音,可能会对球和内/外滚道之间的接触产生不良影响。
2.2 仿真场景
本次分别建立全刚体模型和刚柔耦合模型进行动力学分析,全刚体和刚柔耦合模型,根据柔性体节点数量,其在求解时间上差别很大,用户可根据需要选择适合的类型。如下所示,case1为全刚体模型,case2将保持架设为节点柔性体,case3将保持架,内滚道节点柔性体,将输入轴设为模态柔性体,考虑其变形和应力情况。

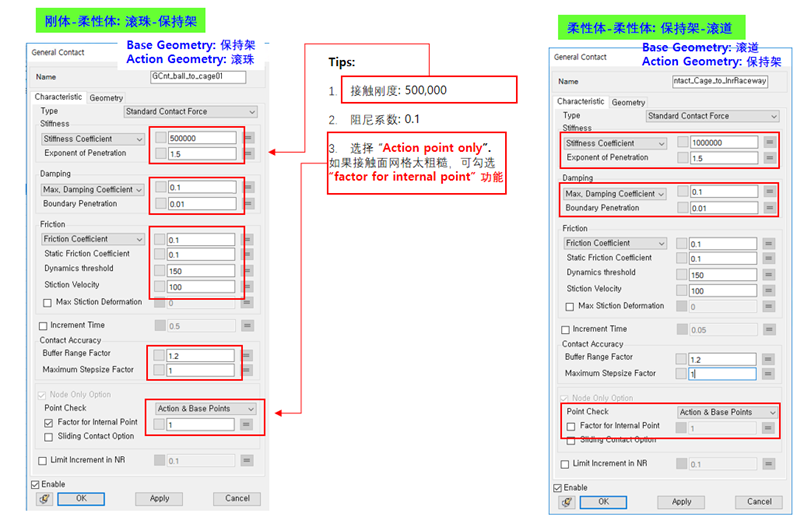
2.3 Ansys Motion接触建模
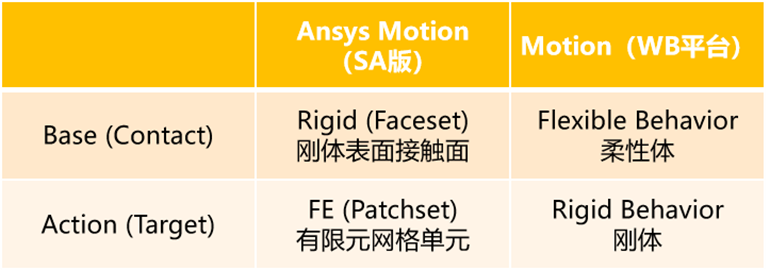
Mechanical环境中的contact对应的独立版中的BASE,Target对应Action ;
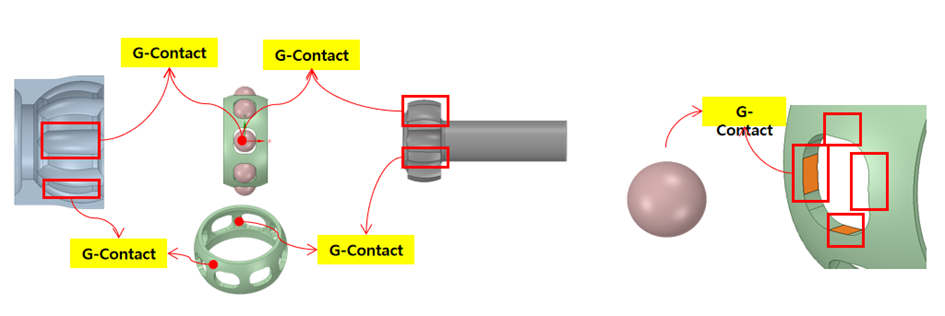
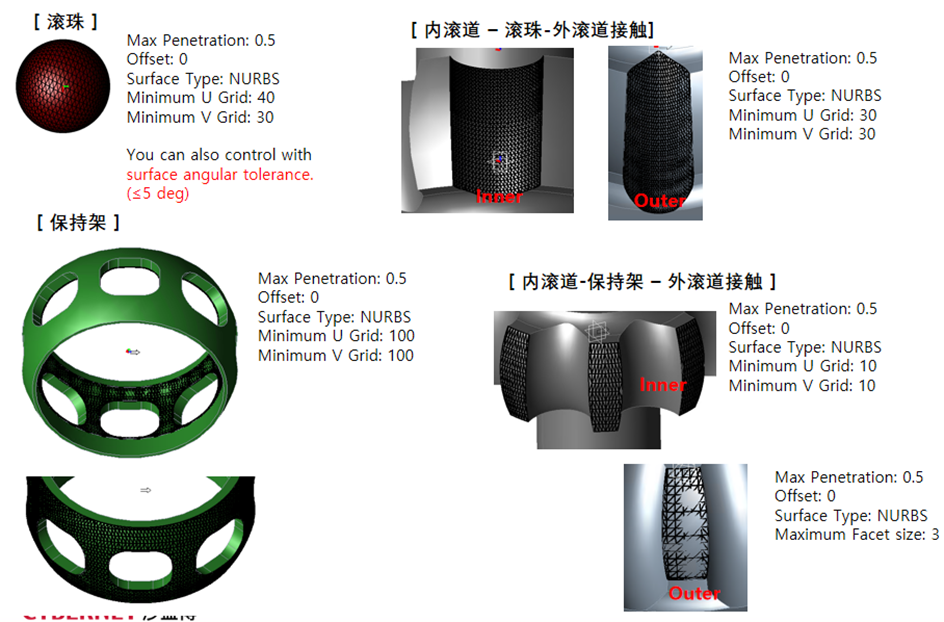
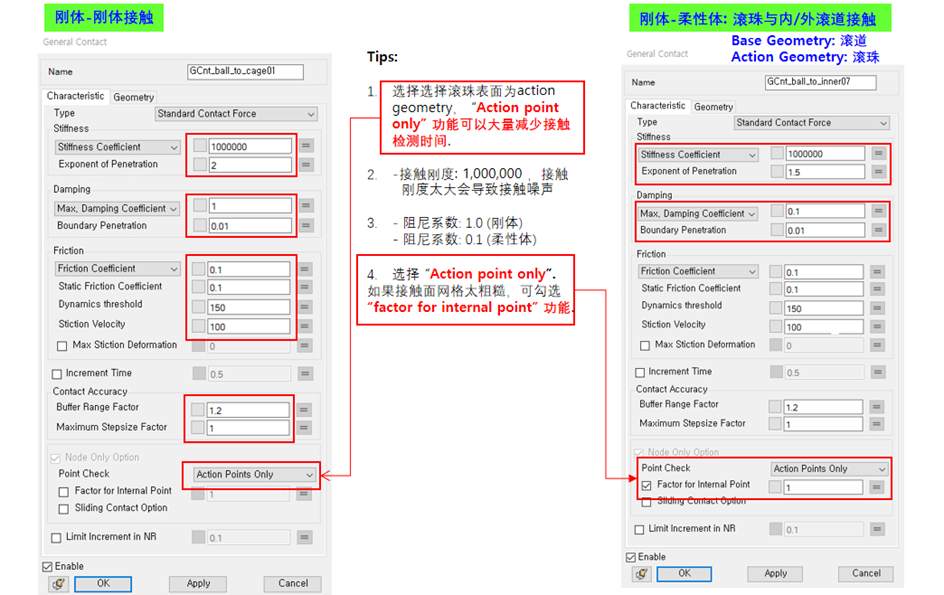
Case1. 全刚体接触模型
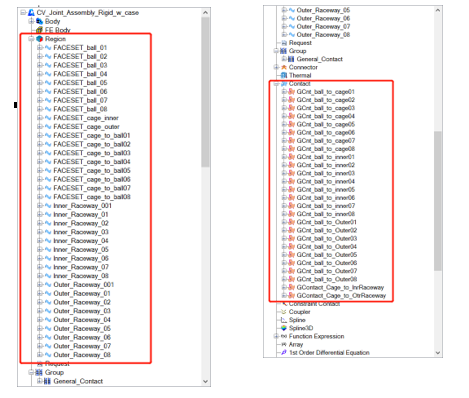
分别在滚珠与内/外滚道,保持架;保持架与内/外滚道之间定义通用接触General contact;
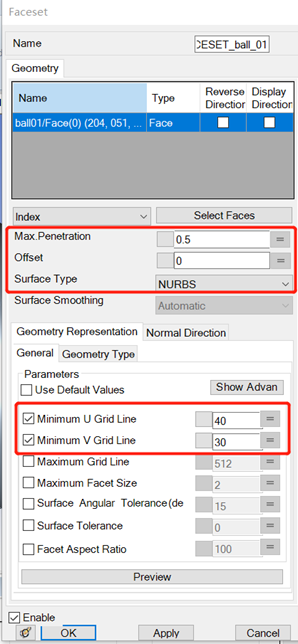
先定义参与接触的面集faceset→定义通用接触General contact

设置Faceset 参数
facet尺寸对接触计算有较大影响,需保持表面网格均匀光滑。但是,过细的表面网格会增加检测接触面的时间。
NURBS:的非均匀有理B样条曲线曲面(Non-Uniform RationalB-Splines)
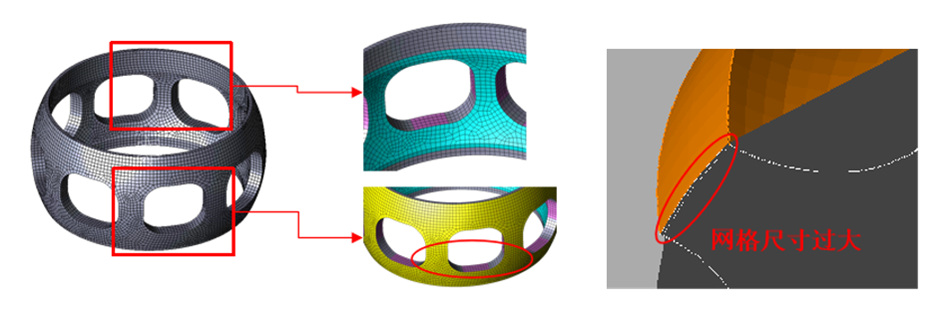
Case2. 刚柔耦合接触模型(保持架)
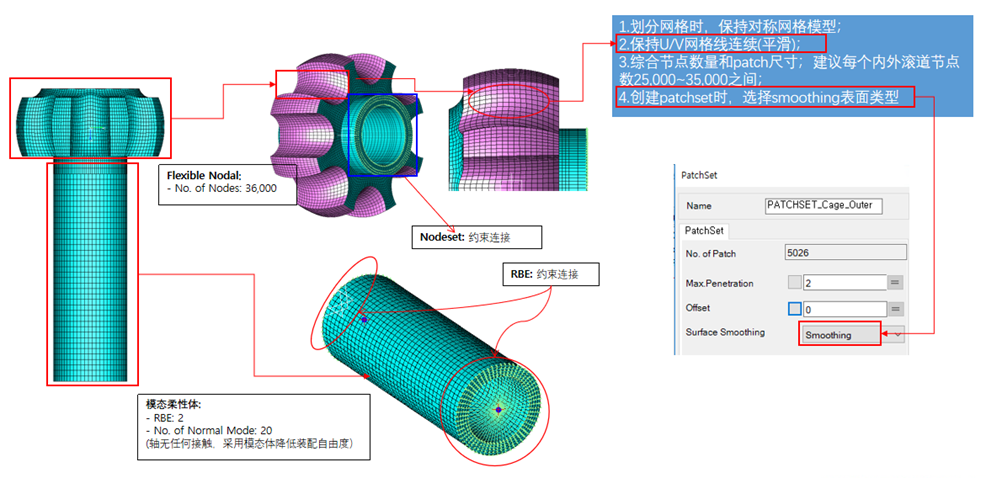
采用自动网格法(六边形为主)对笼体进行网格划分,通过手动调整网格,可以提高笼体的网格质量。
Tips: 确保网格线与CAD几何图形一致。(在进行啮合工作时,CAD几何图形可能会扭曲(调整大小),并可能导致接触不稳定。(引起意外的初始接触力)
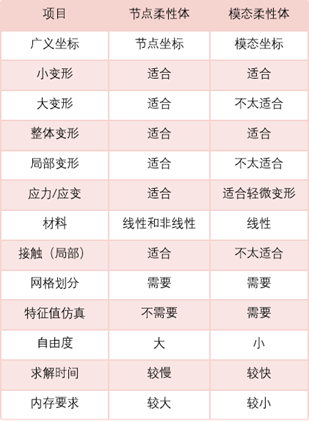
节点柔性体和模态柔性体比较
Case3. 刚柔耦合接触模型(保持架+内滚道+轴)
设置FE节点柔性体Patchset参数
设置刚体接触面faceset参数
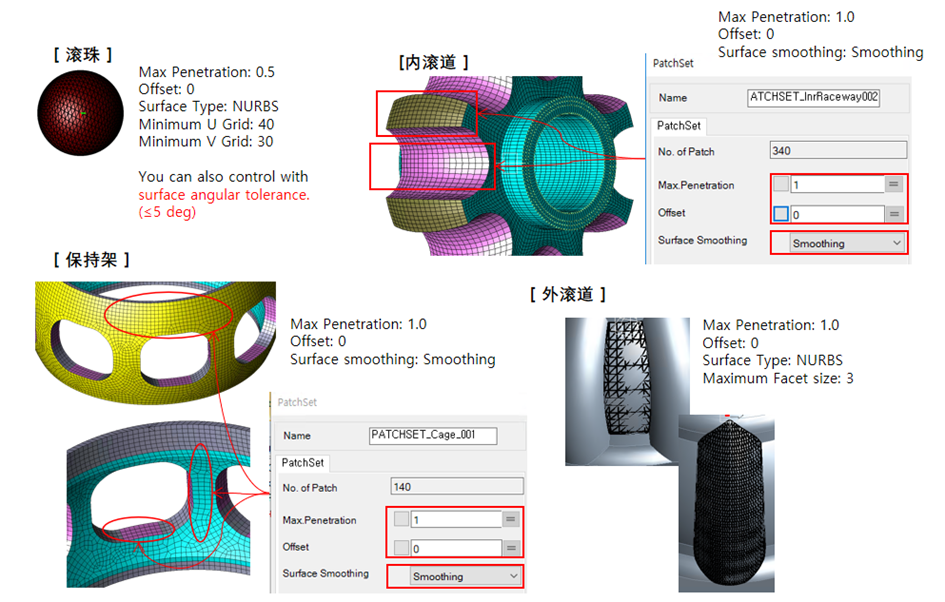
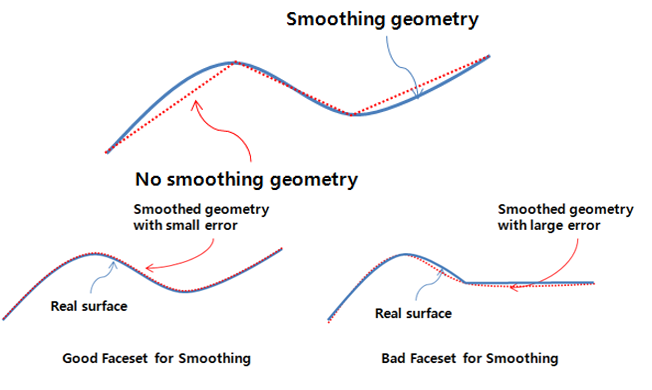
Surface Smoothing
选择Surface Smoothing时,根据几何实际情况建议使用No Smoothing或Smoothing,尽量不使用automatic;
“no smoothing”选项使求解器使用在界面边缘有不连续切平面的原始facet。如果相邻两个切面的切平面的不连续很小,则使用此选项是很好的。“smoothing”选项使求解器使用高阶多项式曲面,以避免相对角度较大的两个相邻切面的切平面不连续。“自动”选项计算两个相邻切面的相对角度,仅当两个相邻切面的相对角度较大时,才应用高阶多项式曲面。
节点柔性体:内滚道; 模态柔性体:轴
接触参数设置
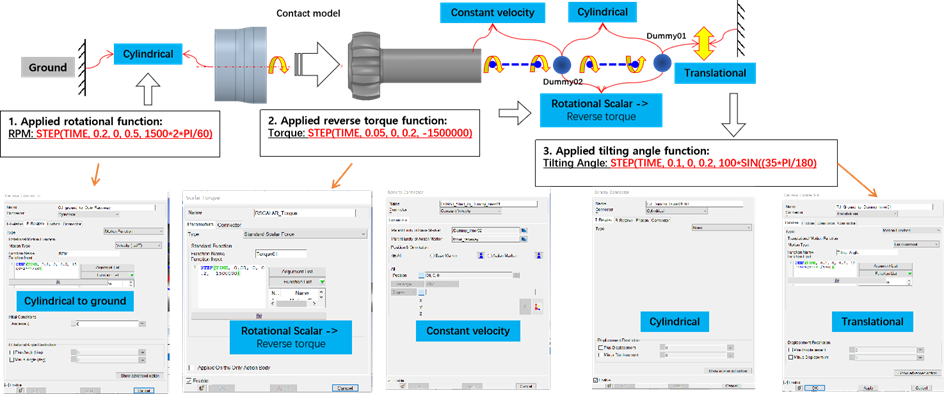
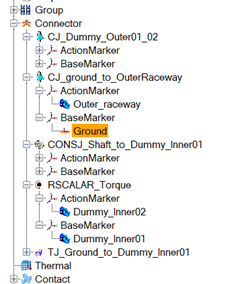
2.4 Constraint and Joint
保持架,滚珠,外滚道与内滚道之间通过定义部件接触传递运动;
如下图所示,在模型中添加移动副,圆柱副,等速万向节和标量力;
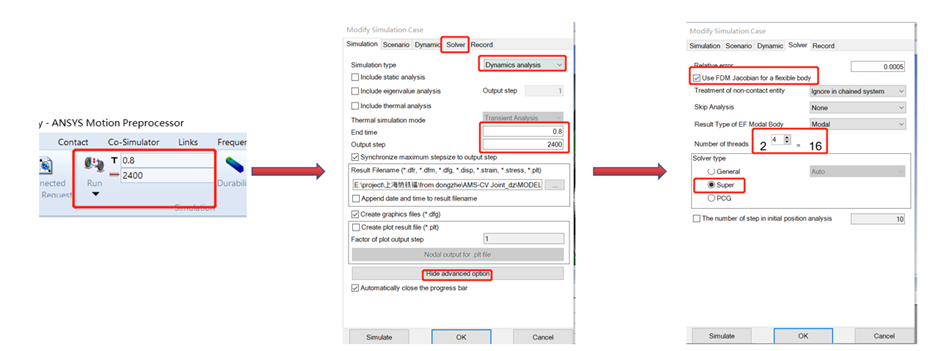
2.5 求解设置
求解器相关设置,求解时间:0.8s,输出步长:2400。
SolverType: Super,当系统没有不连续接触的问题,或系统有节点有限元体并发生小变形时,其求解速度优于general求解器。
UseFDM Jacobian:使用此选项可以通过FDM(有限微分法)计算出更精准的雅可比矩阵。如果仿真模型具有高频率和较大的接触刚度,使用此选项将增加步长,提高解决方案。
2.6 仿真结果
Motionpost是非常强大的专用后处理
Case 1:全刚体模型
4#滚珠与内/外滚道之间接触力
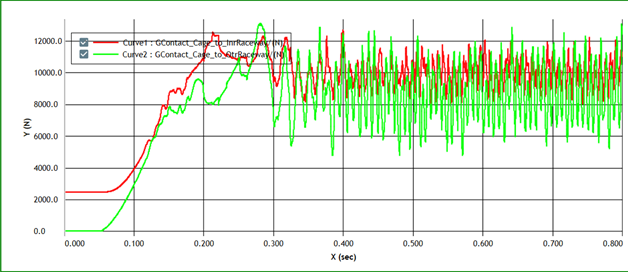
保持架与内/外滚道之间接触力
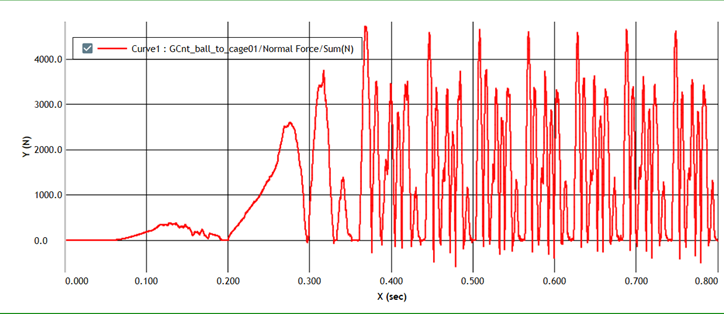
1#滚珠与保持架之间接触力
Case2. 刚柔耦合接触模型(保持架)
Contourrange has changed: Min: 0 ~Max: 200Mpa
Maximumstress: 1097Mpa
Case3. 刚柔耦合接触模型(保持架+内滚道+轴)
3
总结
本案例以等速传动轴为例,利用ansysmotion对等速万向节模型进行动力学建模,分别进行全刚体模型,刚柔耦合模型动力学分析,详述具体设置步骤和接触建模方法。
Ansys Motion为新一代专业刚柔耦合多体动力学分析软件,可以在同一系统中同时建立刚体和柔性体模型,拥有独立motion求解器,针对不同应用场景,提供多种接触模型,对求解大自由度,高速运动,非线性接触问题优势明显。
AnsysMotion同时支持节点和模态柔性体,并可以自由选择,节点柔心体适合大变形,非线性材料,整体和局部变形,适合所有类型柔性体,求解时间长;模态柔性体利用模态坐标适合求解小变形,线性问题,求解效率高。
审核编辑:刘清
-
CAD
+关注
关注
18文章
1144浏览量
76913 -
ANSYS
+关注
关注
10文章
247浏览量
37918 -
求解器
+关注
关注
0文章
85浏览量
4955
原文标题:莎益博案例 | Ansys Motion等速万向节刚柔耦合动力学仿真方案
文章出处:【微信号:ilinki,微信公众号:智汇工业】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
智造引擎,仿真之巅:Altair HyperWorks 重塑工程研发新格局?
[TechwizD和TX液晶显示软件] TVolumeX应用:液晶成盒优化
Altair Radioss:瞬态动力学仿真专家?
Altair CFD 以技术赋能工程创新?
多物理场耦合动力学:机电液耦合下无人机起落架伺服系统解耦控制与动态响应优化研究

【「玩转高速电路:基于ANSYS HFSS的无源仿真实例」阅读体验】+基础篇
椭偏光谱技术在VO₂薄膜光诱导IMT中的应用:瞬态介电函数的动力学路径解析

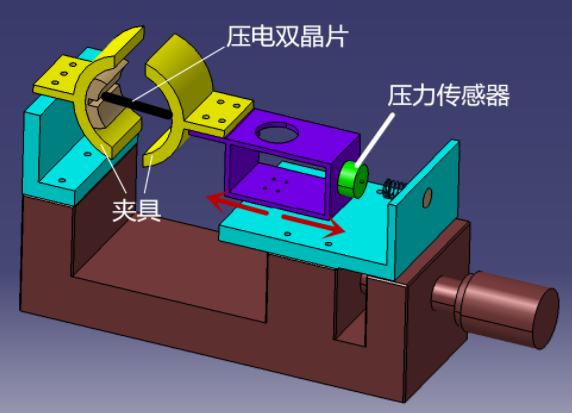
功率放大器赋能:压电双晶片动力学研究的突破之旅
SCI 期刊验证!苏黎世大学使用 ALINX FPGA 开发板实现分子动力学模拟新方案
应用案例 | 深视智能高速摄像机在超疏水材料液滴蒸发动力学研究中的应用




评论