 用于机器人触觉和非接触距离感知的柔性双模态传感器设计
用于机器人触觉和非接触距离感知的柔性双模态传感器设计
具有非接触式传感功能的柔性传感器的开发仍然是触觉感知的技术挑战。对于传统的非接触式传感,通常使用视觉识别和声学反射检测。视觉识别检测更适合长距离检测,长距离检测受分辨率限制,通常会被短距离内的其他事物遮挡。声反射检测既可以用于短距离检测,也可以用于长距离检测,但发射超声波相对较高的功耗将极大地限制其应用场景。此外,传统的非接触式传感方法通常难以应用于柔性传感器中。
近期,浙江大学机械306实验室陈志坚硕士提出了一种新型的柔性双模态传感器,该传感器具有高灵敏度的接触式压力传感和精确的非接触式距离检测功能,用于智能机器人感知。相关研究成果总结成论文“Highly sensitive and flexible dual-mode sensor with contact and contactless sensing abilities for robotic perception”,发表在国际期刊 Journal of Intelligent Manufacturing 上。论文研究工作得到了国家自然科学基金、东海实验室科学基金、中央高校基础研究基金等项目的资助。
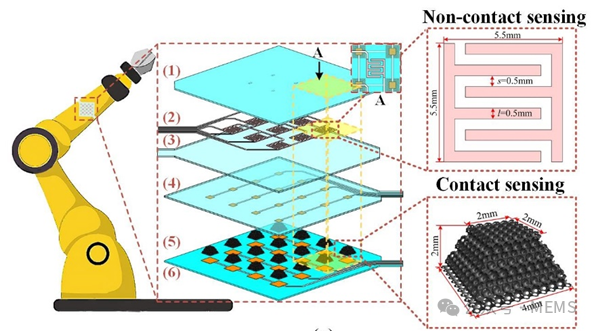
图1 柔性双模传感器的结构示意图
本文所提出的传感器结构如图1所示。柔性传感器上层为3×3的基于电场检测原理的平面叉指电极阵列,用于测量非接触距离信息。下层为4×4的截锥形压力传感单元,用于测量外部接触压力。两种感知单元都通过级联组件和不同的检测单元嵌套布置进行封装,目的是减少不同信号之间的干扰。传感器的工作原理和制造流程如图2和图3所示。
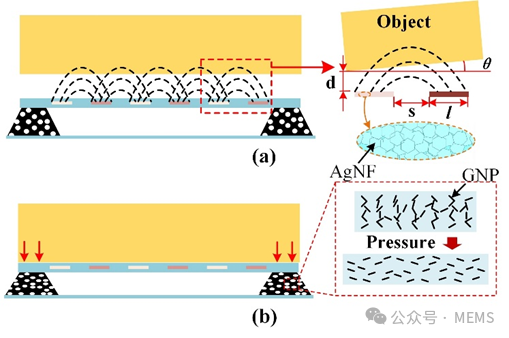
图2 传感器的工作原理
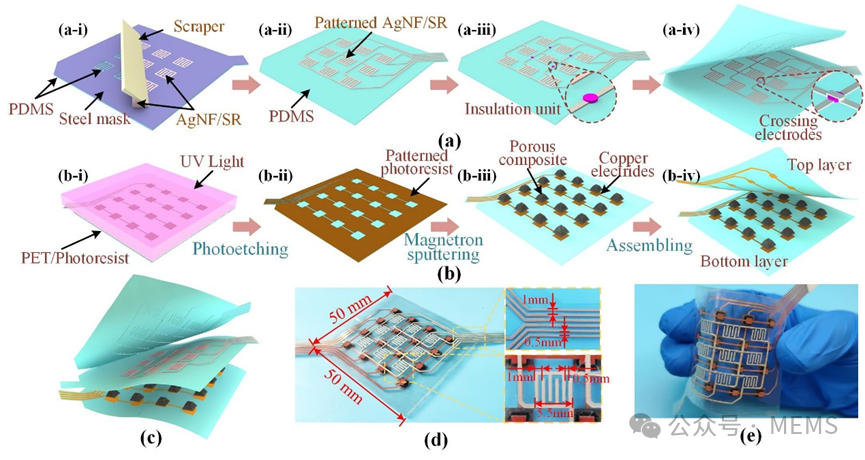
图3 传感器制造流程
制备的柔性双模态传感器具有0.33V/N的压力检测高灵敏度以及5.5N的压力检测范围,4cm内对绝缘物体和导电物体均具有高灵敏距离检测能力,此外传感器还具有良好的信号稳定性和可重复性,传感器的具体信号测试结果分别如图4和图5所示。
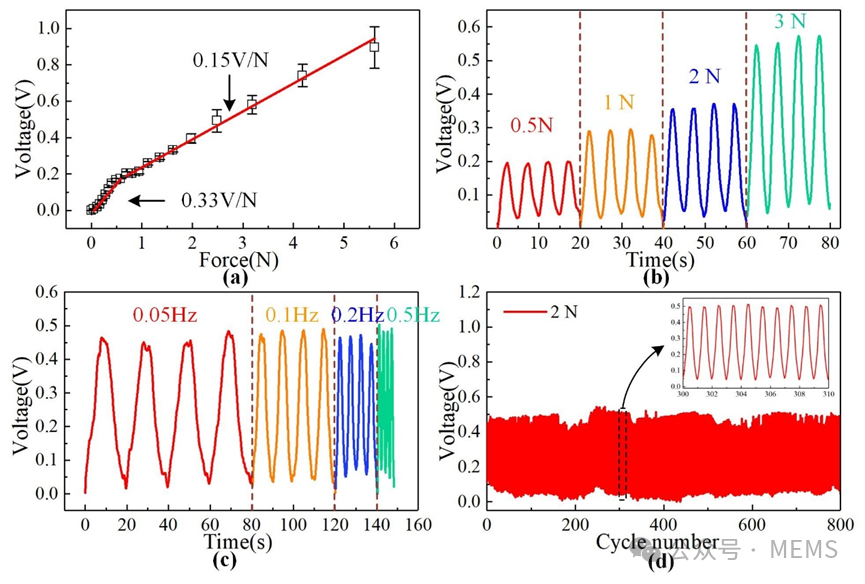
图4 传感器压力感知性能测试结果
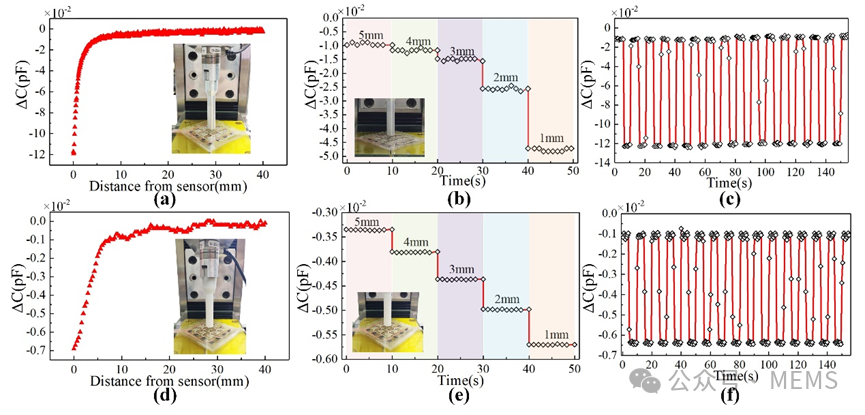
图5 传感器接近觉感知性能测试结果
随后将双模态传感器安装在机械臂上,进行物体的抓取和碰撞检测实验,如图6和图7的结果表明,该传感器可以准确测量物体之间的分布接触力和距离,实现全过程的触觉感知,所提出的传感器在机器人操纵和安全工作应用中具有巨大的潜力。
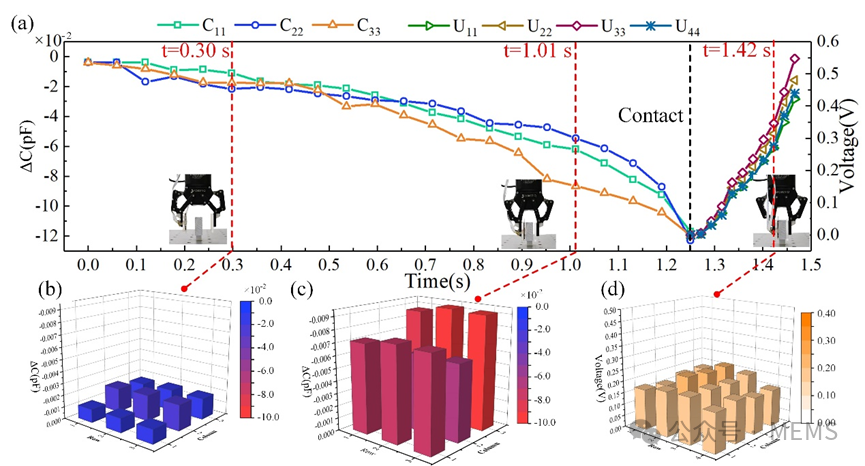
图6 机器人手完全抓取物体过程中的输出信号
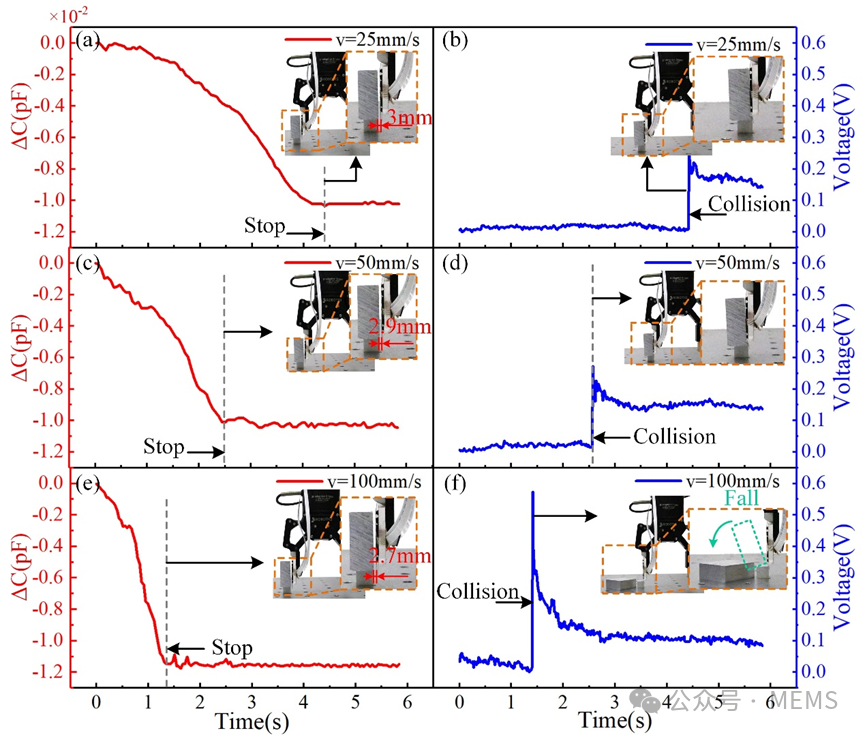
图7 机器人手臂碰撞测试实验
审核编辑:刘清
-
传感器
+关注
关注
2552文章
51383浏览量
756270 -
机器人
+关注
关注
211文章
28632浏览量
208255 -
柔性传感器
+关注
关注
1文章
88浏览量
3984
原文标题:用于机器人触觉和非接触距离感知的柔性双模态传感器
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
中国科大:在机器人触觉传感器研究中取得重要进展

一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU
触觉传感器的发展,对机器人产业有什么影响?
2024世界机器人大会落幕,人形机器人具身智能如何迸发更强感知力?


柔性电子技术革新与人形机器人的电子皮肤应用前景

人形机器人感知系统的特点:多模态感知、高精度、实时性
可用于机器人触觉感知的零泊松比柔性传感器

基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性

全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)






 工商网监
工商网监
评论