 用于机器人化血管栓塞的磁性柔性微纤维机器人研究
用于机器人化血管栓塞的磁性柔性微纤维机器人研究

面对传统栓塞治疗方法在操作手法限制、精确度不足,以及医生长时间暴露于辐射下的健康风险等方面的挑战,磁性微纤维机器人技术的开发提供了一种新的可能性,旨在改善现有的治疗方法。
华中科技大学臧剑锋教授、陶光明教授、上海交通大学的杨广中院士以及中国科学技术大学王柳教授合作,在血管机器人栓塞领域实现了新进展。该团队在Science Robotics上发表了关于磁性微纤维机器人(microfiberbots)技术的研究,题为“Magnetic soft microfiberbots for robotic embolization”(用于机器人化血管栓塞的磁性柔性微纤维机器人),这项技术为治疗脑动脉瘤和脑肿瘤的微创介入方法提供了新的方向。
本文提出使用具有高度操控性、可靠的机动性和多模态形状重重构能力的磁性软微纤维机器人,通过远程、无缆、磁控的方式,在亚毫米区域内执行机器人栓塞。该磁性软微纤维机器人通过将硬磁软复合材料热拉制成百米长的微纤维,所得磁性软纤维的直径可以在20-90μm的超细范围内精确调节。尽管尺寸很小,但这种超细、柔软的磁性纤维保留了其热塑性特性。
随后经过磁化和塑模编程,赋予其螺旋磁性极性。通过控制磁场,磁性软微纤维机器人展示了在流动条件下可逆的延长/聚集形态变换和螺旋推进,允许其通过复杂的血管系统进行可控导航,并在亚毫米区域内执行机器人栓塞。本文在神经血管模型中进行了体外动脉瘤和肿瘤的栓塞,以及在活体兔股动脉模型中进行了实时荧光透视下的机器人导航操控及栓塞。这些实验展示了该工作的潜在临床价值,为未来的机器人辅助栓塞手术方案铺平了道路。
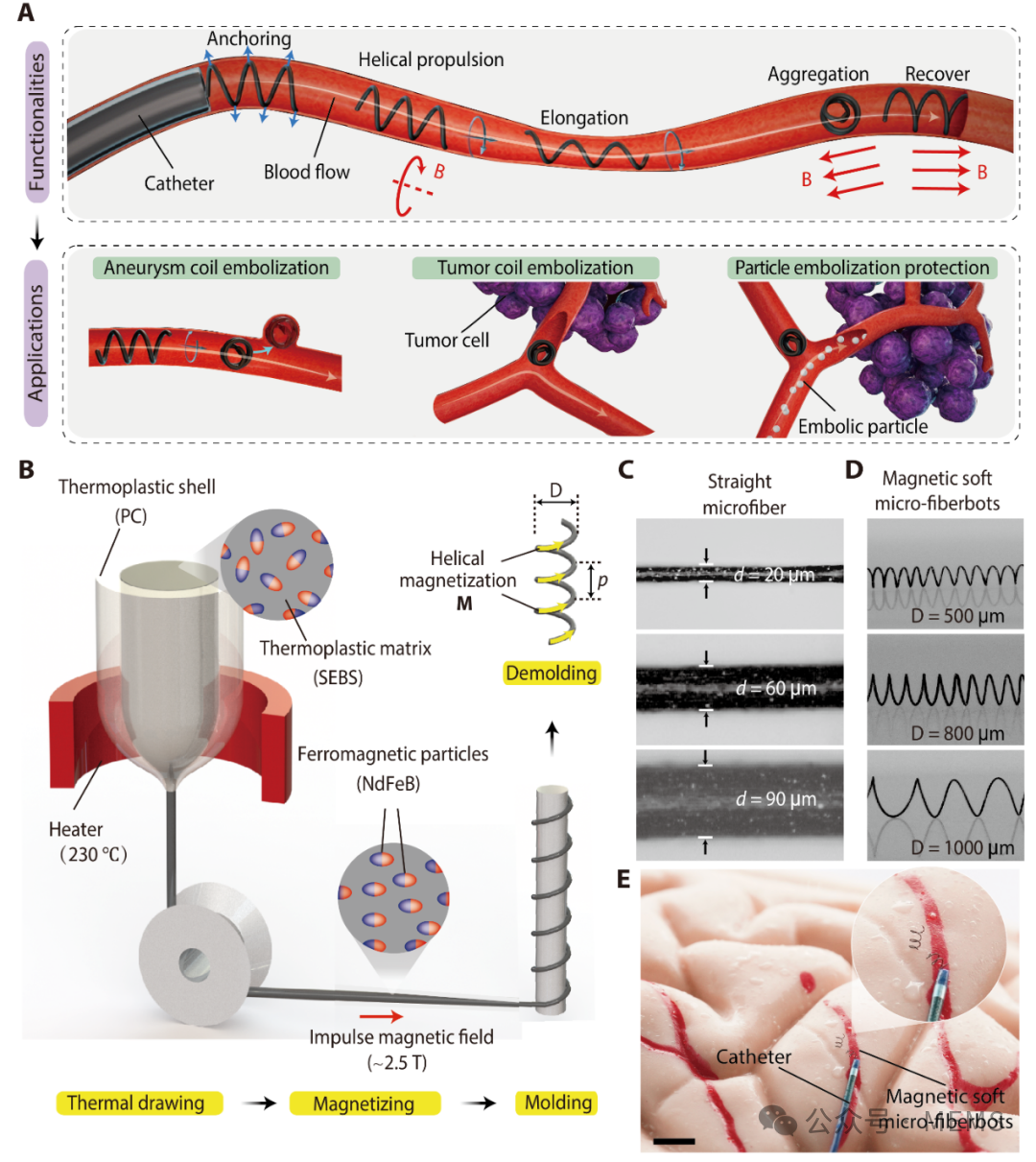
图1 用于机器人栓塞的磁性软微纤维机器人。A 微纤维机器人多模态形状重构及机器人栓塞示意图。B 磁性微纤维热拉制、磁化及塑膜编程示意图。C 多种直径的磁性微纤维的照片。D 微纤维机器人的照片。E 微纤维机器人在脑部假体上的实物图。
微纤维机器人展示出类似血管支架的锚定功能,能够通过接触摩擦力稳定地锚定于血管内壁,避免被血流冲走。其螺旋磁化分布(M)为微纤维机器人提供了沿其中心轴线的净磁化方向(Mnet)。通过施加一个与Mnet方向一致的外部磁场B,可以使微纤维机器人伸长;反之,当外部磁场B与Mnet方向相反时,微纤维机器人则会聚集。这种微纤维机器人的柔软性和高鲁棒性确保了其在超过千次的聚集与伸长循环操作后,其形态重构功能仍保持完全可逆。
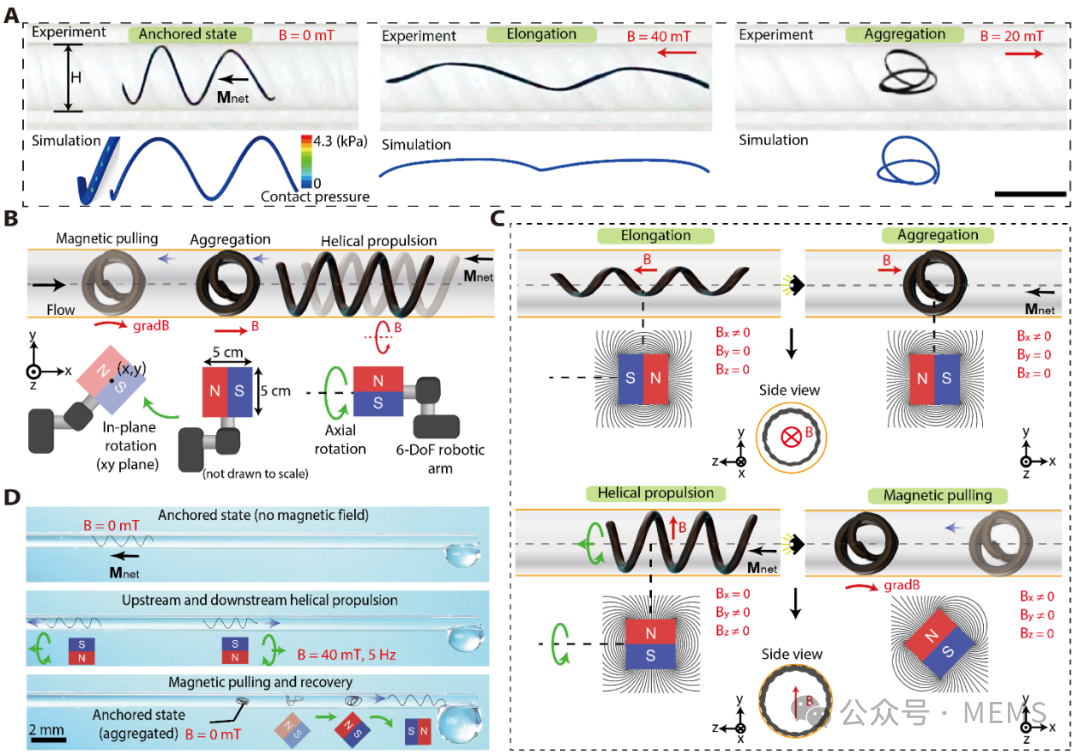
图2 模拟血液流动环境下的形态变换能力和磁性操控性。A 微纤维机器人在锚定、伸长及集聚状态下的实验照片及仿真对应。B 磁场拉伸、原位集聚及螺旋进动磁场操控示意图。C 微纤维机器人在外加磁场下伸长、集聚、螺旋进动及磁性拉伸的多模态磁控示意图。D 微纤维机器人在无外加磁场下原位锚定、外加磁场下逆流、顺流螺旋进动及磁性拉伸、集聚和恢复的照片。
不同于之前报道的磁性软体机器人,微纤维机器人的螺旋磁化方向特性使其变形和运动方式能够独立于控制磁场正交解耦,提供了独特的磁场控制灵活性。这一特性不仅允许单个微纤维机器人在旋转磁场作用下逆血流移动,还能实现多个微纤维机器人的形态和运动的独立控制。此外,这些微纤维机器人还能与常用的介入性导管兼容,以最大化其在临床环境中的应用潜力。
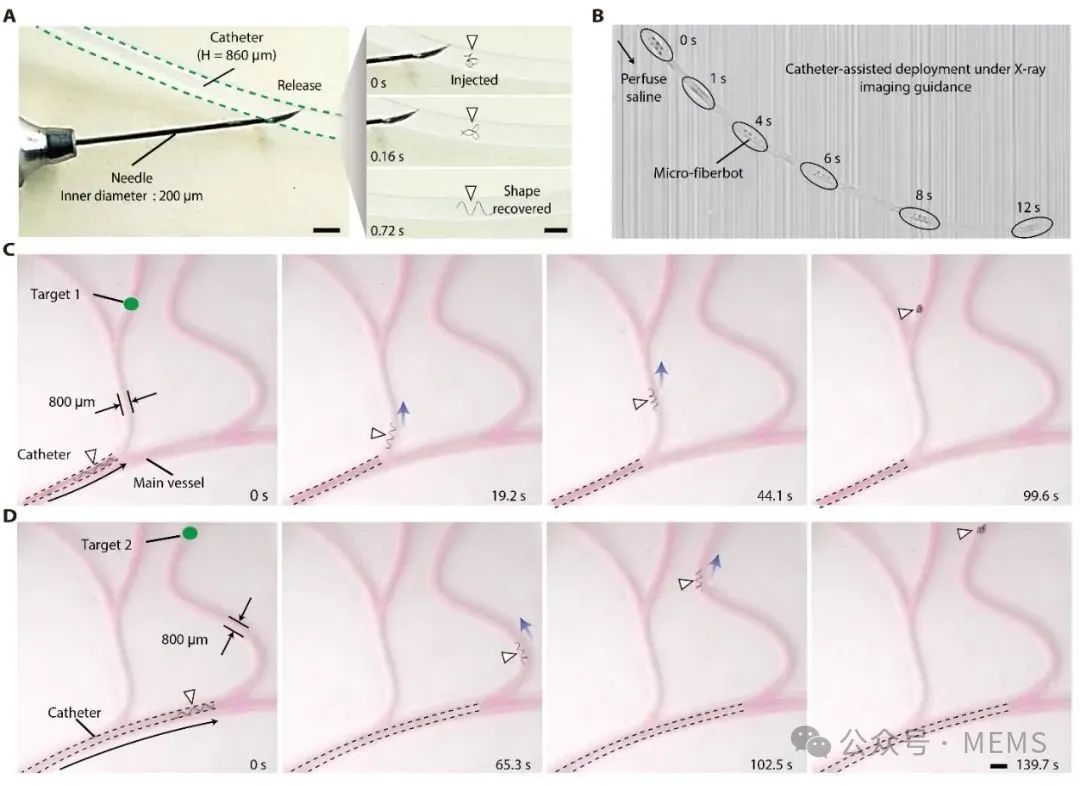
图3 微纤维机器人的导管辅助部署。A 微纤维机器人经针管释放的照片。B 微纤维机器人在X光成像引导下经导管部署的多帧图。C 微纤维机器人经导管部署到目标1的导航多帧照片。D 微纤维机器人经导管部署到目标2的导航多帧照片。
本文在离体的多分叉的血管模型充分展示微纤维机器人在亚毫米区域的导航和变形控制能力。为了进一步验证机器人的功能,作者在活体兔股动脉血管模型中展示了微纤维机器人在血管中的运动导航和多模态形状重构。此外栓塞后三周进行的血管造影表明,微纤维机器人已成功促进稳定的血管栓塞,没有再通的迹象。多重集聚的微纤维机器人的存在阻碍了从血管近端到远端的血流,导致动脉内血栓形成。机器人栓塞手术的兔子血细胞数量在三周后仍保持在正常水平。
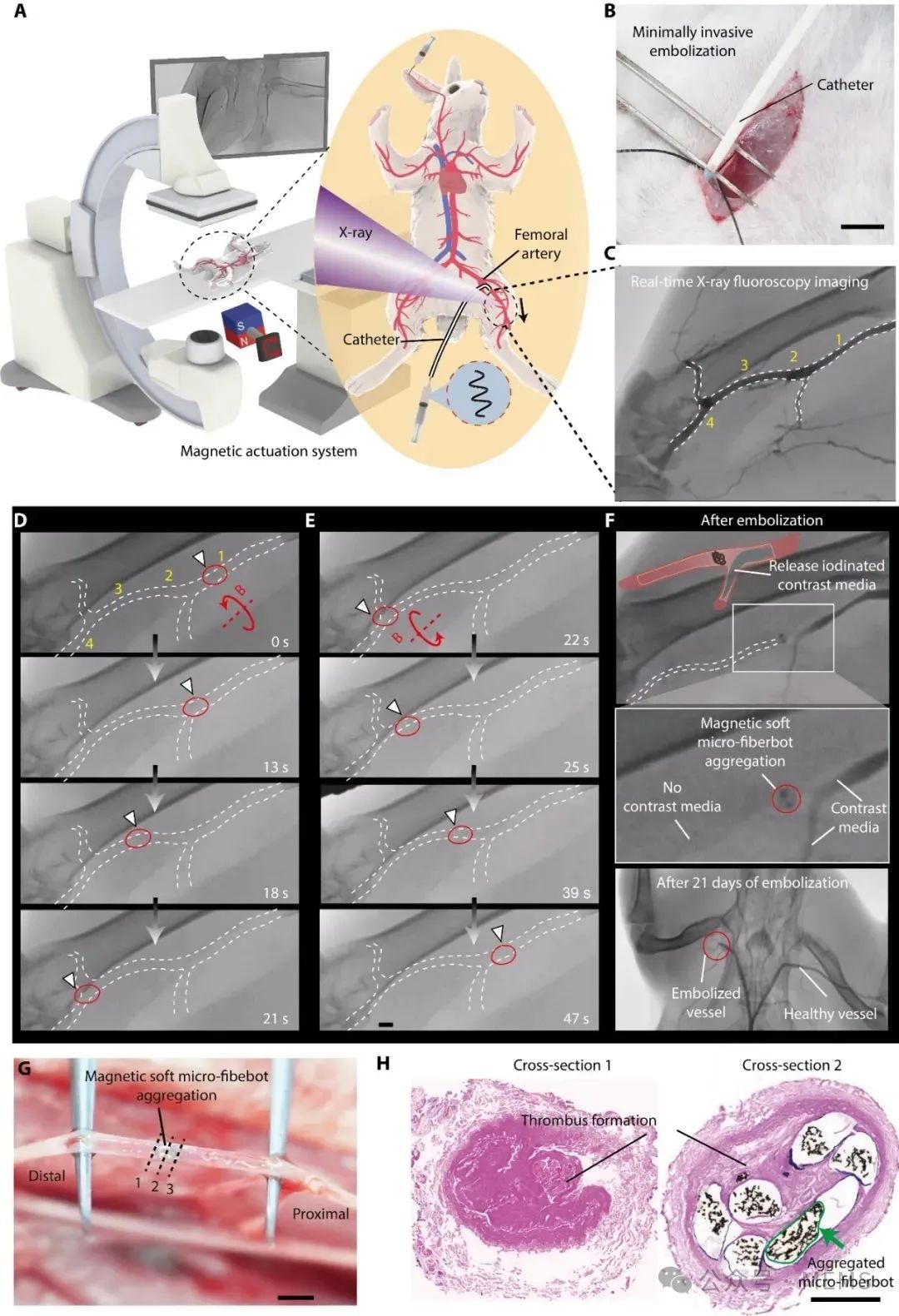
图4 兔体内血管模型中的多重机器人栓塞应用展示。A 微纤维机器人在磁致动系统操控与X光成像引导下在兔体内股动脉血管模型中的机器人栓塞示意图。B 微创机器人栓塞创口照片。C 对4个目标血管靶点的实时X光成像照片。D 微纤维机器人螺旋进动从靶点1到靶点4的导航过程的X光照片。E 微纤维机器人螺旋进动从靶点4到靶点1的回收过程的X光照片。F 微纤维机器人栓塞后效果及手术21天后的效果验证。G 微纤维机器人多重集聚栓塞照片。H 栓塞血管染色横截面照片。
微纤维机器人的开发为血管栓塞治疗提供了新的视角,并在微创手术治疗技术中展现了应用潜力。这种技术通过精确控制血流阻断,为传统的导管栓塞技术提供了有效的补充或替代方案。尽管这项技术展示了潜力,但其应用于临床的进程仍需克服包括微纤维机器人结构优化、材料的生物相容性以及血管定位和跟踪系统开发等挑战。研究团队正致力于解决这些关键问题,以推进这一技术的应用。
华中科技大学集成电路学院硕士毕业生刘旭睿(现香港中文大学博士生)、中国科学技术大学近代力学系特聘教授王柳及华中科技大学武汉光电国家研究中心博士生向远卓为论文的共同第一作者。华中科技大学臧剑锋教授、陶光明教授和上海交通大学杨广中院士为论文通讯作者。其他主要合作者还包括,华中科技大学附属协和医院肝胆外科主任万赤丹教授,华中科技大学同济医学院附属同济医院心脏内科周宁教授和华中科技大学机械学院尹周平教授等。该研究得到了国家自然科学基金、华中科技大学交叉研究支持计划等项目的资助。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.adh2479
-
机器人
+关注
关注
214文章
31611浏览量
224323 -
软体机器人
+关注
关注
1文章
116浏览量
12155
原文标题:用于机器人化血管栓塞的磁性柔性微纤维机器人
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案
为什么说人形机器人炫技大于实用,复合机器人是未来工厂核心设备

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
复合机器人在机加工产线无人化中的应用与技术发展
为什么复合机器人是未来无人化工厂的核心设备?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
人形机器人重复定位精度:工业柔性制造的“定海神针”
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
高压放大器在软体机器人研究中的应用




评论