 基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性
基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性
柔性应变传感器对软体机器人的感知和自主性至关重要。然而,它们的可变形体和动态驱动在预测传感器制造和长期鲁棒性方面带来了挑战。这需要精确的传感器建模和在应变下良好控制的传感器结构变化。
据麦姆斯咨询报道,近期,新加坡国立大学(National University of Singapore)的研究人员提出了一种计算传感器设计,其特点是微褶皱策略中的编程裂纹阵列。通过控制自定义结构,传感性能变得高度可调,并且可以通过物理模型精确建模。此外,该传感器在噪声干扰(50%应变)、间歇性循环载荷(100,000次循环)和动态频率(0-23 Hz)等各种苛刻的条件下,仍能保持强大的响应能力,满足从宏观到微观各种规模的软体机器人。相关研究成果以“Computational design of ultra-robust strain sensors for soft robot perception and autonomy”为题发表在Nature Communications期刊上。
在这项研究中,研究人员采用环境稳定的单壁碳纳米管(SWNT)来制备压阻应变传感器。他们开发了一种两阶段设计,结合了“微褶皱中的编程裂纹阵列”的特征,得到了简称为PCAM的传感器。首先,通过精确的传感器制造和规定的结构演变来实现传感器建模。基本上,通过激光辅助制造,用户定义的叉指型裂纹阵列被编程在压阻应变传感器的微褶皱内,显示出高度可控的裂纹扩展行为和可调谐的传感器特性。通过输入包括裂纹密度和微褶皱特征在内的传感器结构参数,建立相应的有限元分析(FEA)模型,以引导包括机械和电学演化的双重物理场,并高精度地模拟不同传感器的传感曲线。然后,通过确定的裂纹扩展模式和微褶皱特征,实现了传感器的良好鲁棒性。
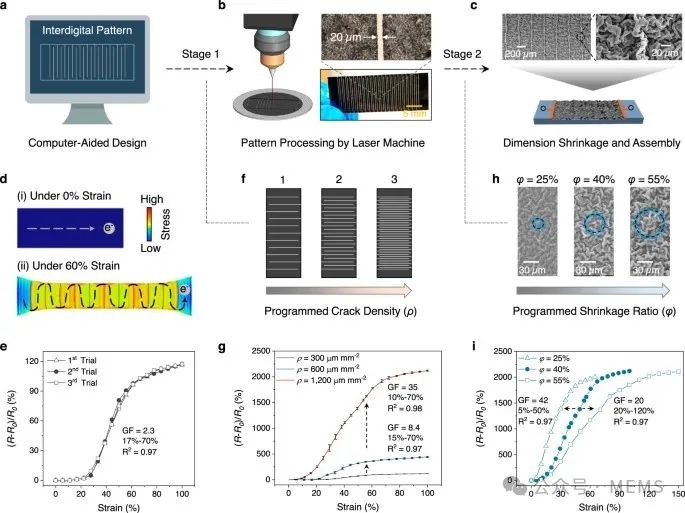
计算引导的PCAM传感器设计
本文所开发的PCAM传感器在噪声干扰(高达50%的应变)、间歇性循环载荷(100,000个循环)和动态操作频率(0-23 Hz)等各种具有挑战性的工作条件下,均能保持稳健的传感响应。这种鲁棒传感器极大地增强了集成软体机器人的感知能力,为监测其高自由度身体变形和多模态驱动行为提供了稳定的传感信号,确保了构建预测模型时的高学习效率。
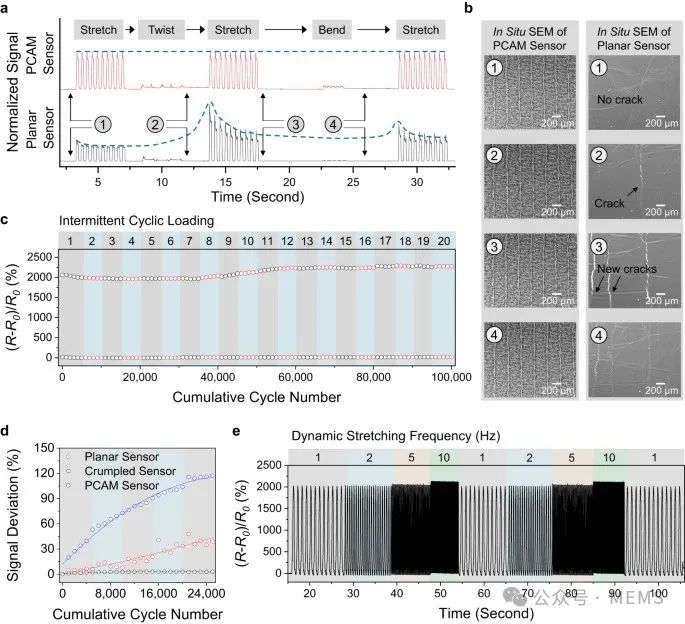
PCAM传感器的机械稳定性
PCAM传感器在软体机器人上的有效集成,构建了复杂软体爬行机器人的高级机器智能。对于当前在软机器人或执行器上的机器学习(ML)应用,应用目标主要是软手套或软夹具。为了捕捉它们的运动,毫无疑问要在所有抓爪或手套手指上安装传感器。
然而,对于本研究中的爬行折纸机器人,传感器位置有40多种可能性,这对有效捕捉其高自由度和多模态运动提出了挑战。为了实现机器人自主性,研究人员开发了一个高分辨率传感器网络(优化机器人身上的传感器数量和位置),以收集机器人折纸运动最具代表性的关键信息。因此,简单的人工神经网络框架和不到40个训练样本足以生成预测模型,并成功实现了软爬行机器人的高级机器人自主性(即机器人轨迹预测和地形高度感知)。
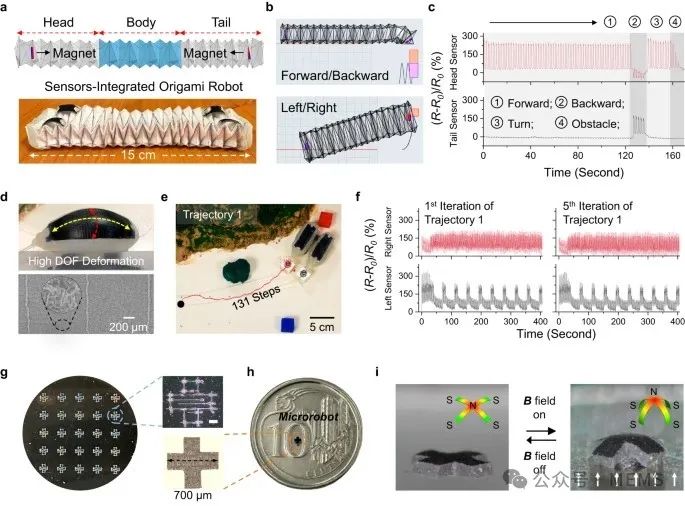
集成PCAM传感器的不同规模的软体机器人
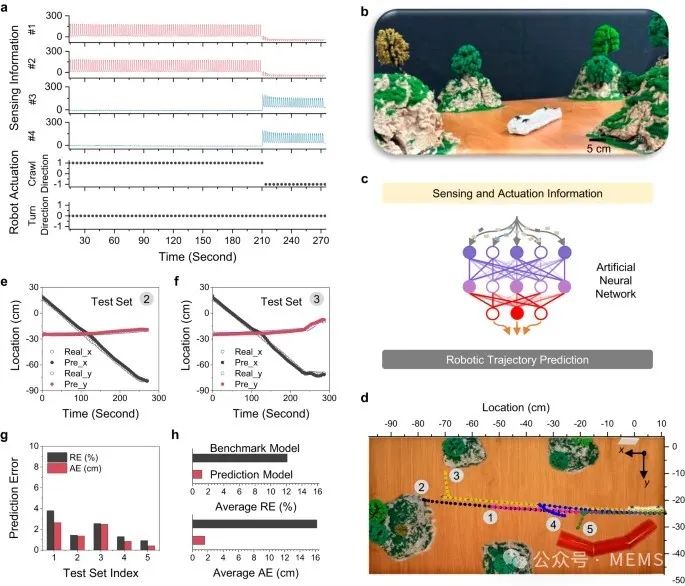
用于机器人轨迹预测的智能传感器网络
总而言之,研究人员开发了一种计算应变传感器设计,其基于微褶皱策略中的编程裂纹阵列,克服了预测制造、用户特定参数和超稳定性的严格要求。通过控制用户自定义的参数,即裂纹密度和收缩率,PCAM传感器的应变灵敏度因数和线性工作窗口是高度可调的,并且可以用有限元分析工具对其传感行为进行高精度建模。PCAM传感器在噪声、间歇性和动态操作等各种具有挑战性的工作条件下,均表现出优异的机械鲁棒性。这些传感器可以进一步集成到跨越宏、微观尺度的各种软机器人中,无论机器人规模如何,都能保持一致和可靠的感知。最后,将人工神经网络算法引入到集成传感器的折纸机器人中,实现了机器自主导航、高精度轨迹预测和周围感知导航。
从未来的角度来看,该应变传感器设计对从折纸机器人到气动机器人以及从宏观到微观的各种软体机器人表现出高度的适应性。这些高度适应性的集成传感器的软体机器可以应用于各种环境,使它们具有增强的感知功能和机器智能能力。这种多功能性为各种任务提供了优势,例如机器人可以在有限的物理空间中操作(例如化学品泄漏和货物运送),在未知环境中导航,以及能够远程控制不受束缚的机器人。此外,可以开发更先进的机器学习算法来连接和管理多个集成传感器的机器人,为实现更高的软体机器人群体智能提供机会。
审核编辑:刘清
-
碳纳米管
+关注
关注
1文章
154浏览量
17331 -
机器学习
+关注
关注
66文章
8438浏览量
132993 -
软体机器人
+关注
关注
1文章
111浏览量
11750 -
应变传感器
+关注
关注
0文章
64浏览量
4711 -
柔性传感器
+关注
关注
1文章
88浏览量
3980
原文标题:基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人“大脑+小脑”范式:算力魔方赋能智能自主导航
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
自动驾驶中常提的鲁棒性是个啥?






 工商网监
工商网监
评论