 通信协议之SPI总线硬件篇
通信协议之SPI总线硬件篇
一、概述
SPI:Serial Peripheral Interface,串行外围设备接口。
是由摩托罗拉在20世纪80年代中期开发的同步串行总线接口规范(带有时钟信号,通过时钟极性和时钟相位来控制采样,
即同步传输)。
1、支持半双工、全双工通信模式。
2、没有流控制和应答机制来确认是否接收到数据(UART有校验或流控制)。
3、没有一个固定的传输速率规定,已有器件SPI输出速率达到50Mbps以上(I2C有明确规定速率)。
4、只能板内的短距离传输(RS232、RS485输出距离远)。
5、没有限制传输bit数量,常用的是8bit或9bit。
6、不需要硬件地址(I2C要地址),采用片选。
7、主从模式,一托多。
二、3线和4线模式
3线SPI和4线SPI各个模式下信号定义:
3线9bit I型 接口信号:SCL、CS、SDA
3线9bit II型接口信号:SCL、CS、SDO、SDI
4线8bit I型接口信号:SCL、CS、DCX、SDA
4线8bit II型接口信号:SCL、CS、DCX、SDO、SDI
3线9bit 2 data Lane 接口信号:SCL、CS、D0、D1
对于3线或4线来区分,并不是信号线的数量,也不是网上说的半双工和全双工,或者数据线数量差异。
个人认为:
3线说的是时钟、片选、数据信号(不管是一根数据线,还是两根数据线),共三种信号。
4线说的是时钟、片选、数据信号、数据或命令控制线(确定发送的是数据还是命令),共4中信号。
三、SPI 四种工作模式
通过CPOL时钟极性和CPHA时钟相位的搭配来得到四种工作模式:

CPOL时钟极性定义的是 SCLK时钟线空闲状态时的电平
CPOL=0,即SCLK=0,表示SCLK时钟信号线在空闲状态时的电平为低电平,因此有效状态为高电平。
CPOL=1,即SCLK=1,表示SCLK时钟信号线在空闲状态时的电平为高电平,因此有效状态为低电平。
CPHA时钟相位定义的是数据位相对于时钟线的时序(即相位)
CPHA=0,即表示输出(out)端在上一个时钟周期的后沿改变数据,而输入(in)端在时钟周期的前沿(或不久之后)捕
获数据。输出端保持数据有效直到当前时钟周期的尾部边缘。对于第一个时钟周期来说,第一位的数据必须在时钟前沿之
前出现在MOSI线上。也就是一个CPHA=0的周期包括半个时钟空闲和半个时钟置位的周期。
CPHA=1,即表示输出(out)端在当前时钟周期的前沿改变数据,而输入(in)端在时钟周期的后沿(或不久之后)捕获
数据。输出端保持数据有效直到下一个时钟周期的前沿。对于最后一个时钟周期来说,从机设备在片选信号消失之前保持
MISO信号线有效。也就是一个CHPA=1的周期包括半个时钟置位和半个时钟空闲的周期。
四、SPI升级版
SPI flash接口有standard SPI、Dual SPI、Quad SPI、Octal SPI,也就是所谓的1248线模式。

五、SDR和DDR模式
SPI通信支持SDR和DDR模式。
SDR:Single Data Rate通过 SCLK 的触发对信号进行采样时,一个时钟周期只执行一次,称为单倍数据速率模式。
DDR:Double Data Rate通过 SCLK 的触发对信号进行采样时,每个上升沿和下降沿将采样一次。
也就是说一个时钟周期内发送2位或者接收2位数据,称为双倍数据速率模式
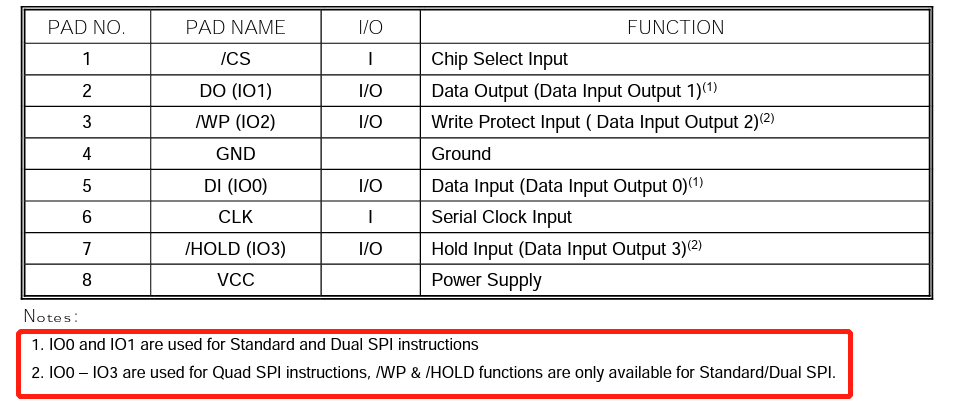
六、SPI Flash接口
Dual SPI有两根数据IO;Quad SPI有4根数据IO。
SPI flash spec:
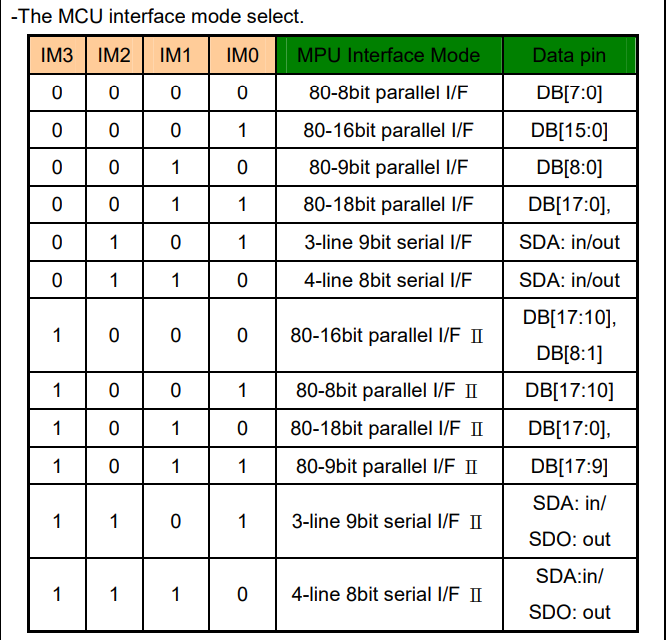
七、SPI TFT液晶屏接口
TFT液晶屏ST7789 spec定义,支持串行和并行,支持SPI多种通信模式。
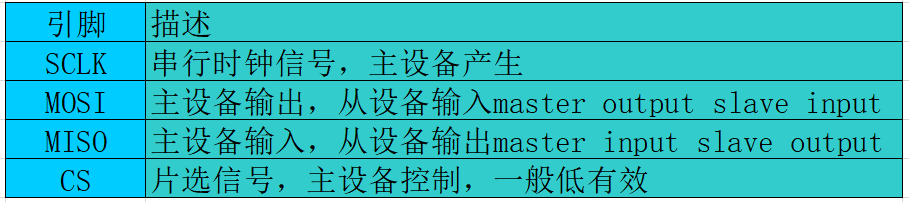
八、信号定义及连线
标准SPI接口信号定义:
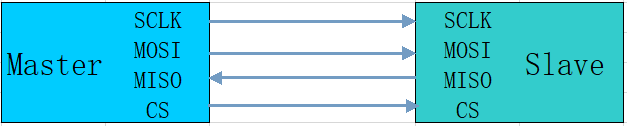
标准的SPI规范连线:
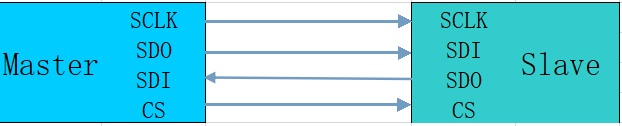
SDOSDI网络命名的连线(SDO和SDI交叉):
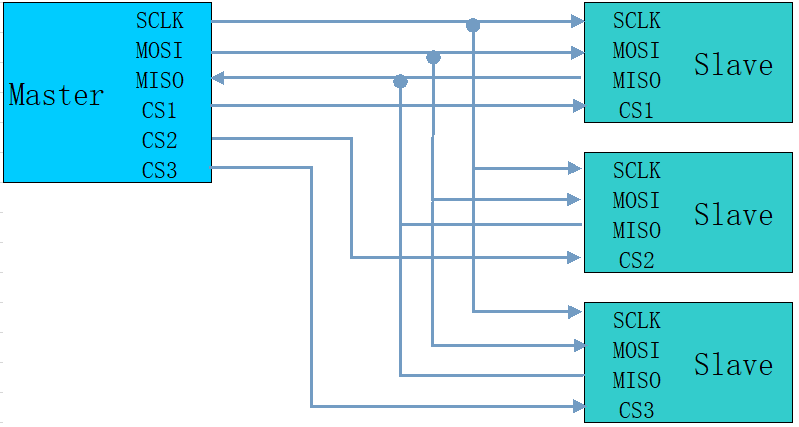
SPI总线,一对多连线:
九、小结
1、有的参考设计原理图中,用SDI表示MOSI,用SDO表示MISO,连线要注意输出和输入的定义。
2、芯片引脚的信号输入或输出,是针对自身来标明的,因此在主从设备芯片的输出或输入要连接正确。
3、电路设计上引脚信号不需要上拉。如果是IO模拟的话,需注意是不是开漏,如是要加上拉。另,要确认器件spec的SPI
信息,可能有特殊的要加上下拉。
4、一对多的连线,片选信号CS单独控制,多个从设备需要多个CS信号。
5、从设备未被选中时,信号线变成高阻态(断开)。
6、Layout上没有特殊要求,当然可以SCLK信号包下地。
审核编辑 黄宇
-
通信协议
+关注
关注
28文章
882浏览量
40305 -
SPI
+关注
关注
17文章
1706浏览量
91559 -
总线
+关注
关注
10文章
2881浏览量
88075
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论