 工业机器人的触觉传感器有哪些?传感器作用是什么?
工业机器人的触觉传感器有哪些?传感器作用是什么?
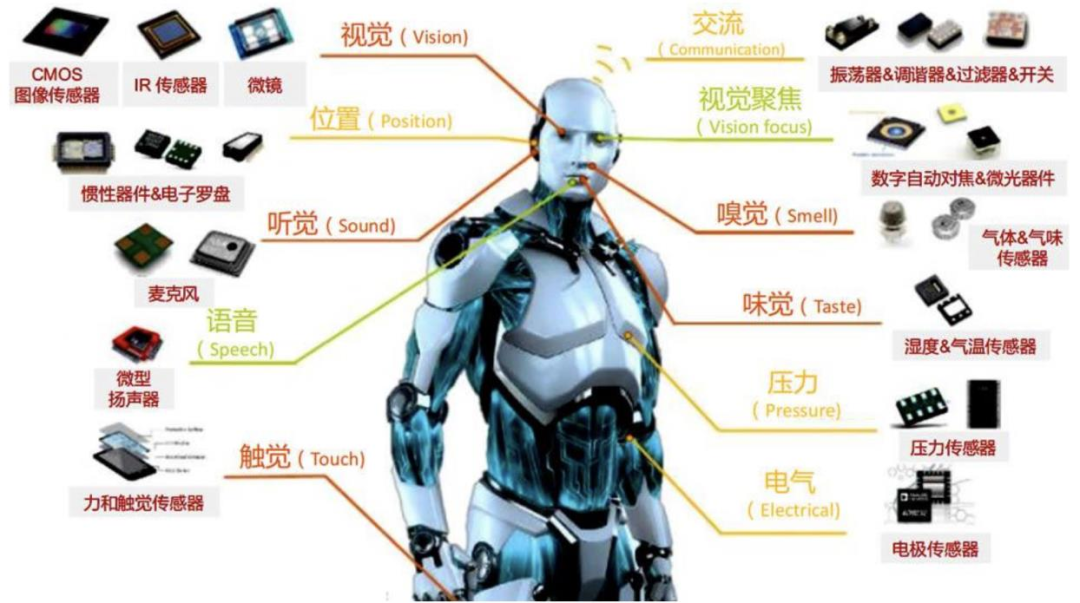
工业机器人触觉传感器可以帮助工业机器人测量与其环境的任何物理交互。传感器可以测量与传感器和物体接触相关的参数。工业机器人也受益于触觉。力和触觉传感器使机器人能够在结构较小的环境中以更高的精度和灵敏度操纵物体。
触觉传感器是根据其触摸的生物感觉设计的,可以检测机械刺激.刺激温度和疼痛。触觉传感器将接收并响应力或物理接触的信号。
一系列应用中有几种不同的触觉传感器,如感应正常压力和动态触觉感应。它们是机器人技术中常用的传感器之一,包括压电.压阻.电容和弹性类型。本文将主要介绍工业机器人触觉传感器的功能和触觉传感器的类型。
1.光学触觉传感器:光学触觉传感器有内外两种类型。在这种类型中,通过将障碍物移动到光路来调节光的强度。它具有抗电磁干扰的优点,分辨率很高。需要低布线,电子设备可以远离传感器。
2.压电触觉传感器:当向传感器元件施加压力时,传感器元件上的电压效应为压电效应。电压的产生与施加的压力成正比。在这种情况下,不需要外部传感器。这种传感器的优点是耐久性和宽动态范围。可以测量压力。
3.电阻触觉传感器:传感器的工作是基于导体聚合物和电极之间的电阻变化。这种类型的触觉传感器被广泛使用。当施加压力时,导电材料的电阻会发生变化。然后测量电阻。该传感器具有耐久性高、过载耐受性好等优点。
4.电容式触觉传感器:两个电极之间的电容变化用于电容式传感器。这种类型的电容式传感器将测量电容,并在施加的压力下发生变化。平行板电容器的电容与板的间距和面积有关。电容器会根据负载而变化。该传感器具有线性响应和宽动态范围的优点。
5.磁触觉传感器:磁触觉传感器采用两种方法,一种是测量磁通密度的变化,另一种是绕组间磁耦合变形的变化。该传感器具有灵敏度高、无机械滞后等优点。
工业机器人触觉传感器的作用
在工业机器人操作技术中,视觉和触觉就像在人类领域一样,是一种互补的模式。行业专家预计,视觉技术将很快被添加到主流机器人的应用中。基本上,工业机器人触觉传感器是一种可以提供与其接触对象相关的触摸传感器。信息是关于触摸对象的形状.尺寸和类型。
工业机器人触觉传感器可以检测物体等物体的存在。它还可以确定零件的形状.位置和方向。与传感器接触的物体接触是压力,因此压力分布可以确定。该设备可以完成对物体的检查,如纹理监测.接头检查或损坏检测。工业机器人触觉传感器可以检测各种刺激,检测物体的存在,获得触觉图像。触觉传感器有许多敏感部件。在这些部件的帮助下,触觉传感器可以测量多个属性。
工业机器人触觉传感器的功能组件包括一个对不同范围运动敏感的微动开关。它是一个触摸传感器阵列,形成一个更大的传感器,称为触摸传感器。单独的触摸传感器将解释机器人手指和纹理表面之间的物理接触。一旦工业机器人与物体接触,它就会向控制器发送信号。
『科瑞特自动化技术』专业提供工业自动化运动控制技术及解决方案!
---(激光)焊接、抛光、喷涂、切割、直坐标机器人(桁架机械手)、等特种数控设备运动控制系统,(步进电机、伺服电机、驱动器、电源)。
审核编辑 黄宇
-
机器人
+关注
关注
210文章
28180浏览量
206315 -
测量
+关注
关注
10文章
4765浏览量
111113 -
触觉传感器
+关注
关注
4文章
82浏览量
9317
发布评论请先 登录
相关推荐
这批中国企业,在做人形机器人触觉传感器
一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU
触觉传感器的发展,对机器人产业有什么影响?

视觉传感器助力机器人“看到”并理解周围世界
风道风速传感器的作用是什么
解读工业机器人避障常用的视觉传感器、激光传感器、红外传感器、超声波传感器

位移传感器的作用是什么 位移传感器有几种
全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)

用于机器人物体识别和滑动检测的磁敏触觉传感器

机器人会用到哪些传感器
人形机器人柔性触觉传感器的关键技术分析





 工商网监
工商网监
评论