 EtherCAT运动控制器在ROS上的应用开发案例(下)
EtherCAT运动控制器在ROS上的应用开发案例(下)
本篇文章我们主要介绍正运动技术动态链接库环境配置以及EtherCAT运动控制器在ROS下的单轴运动。
在正式学习之前,我们先了解一下正运动技术的EtherCAT运动控制器ZMC432和ZMC408CE。这两款产品分别是32轴,8轴EtherCAT运动控制器。
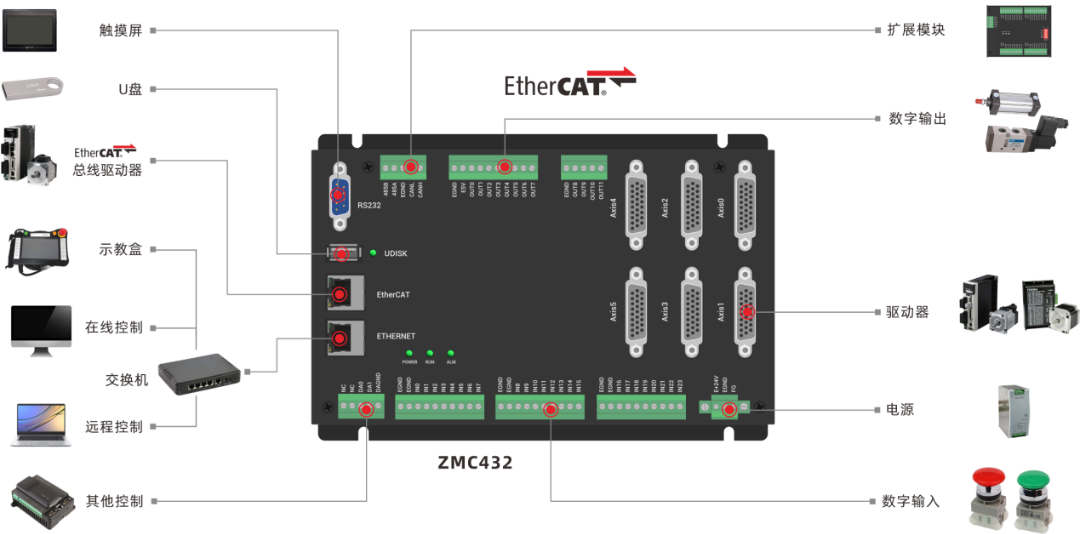
ZMC432功能简介
ZMC432是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
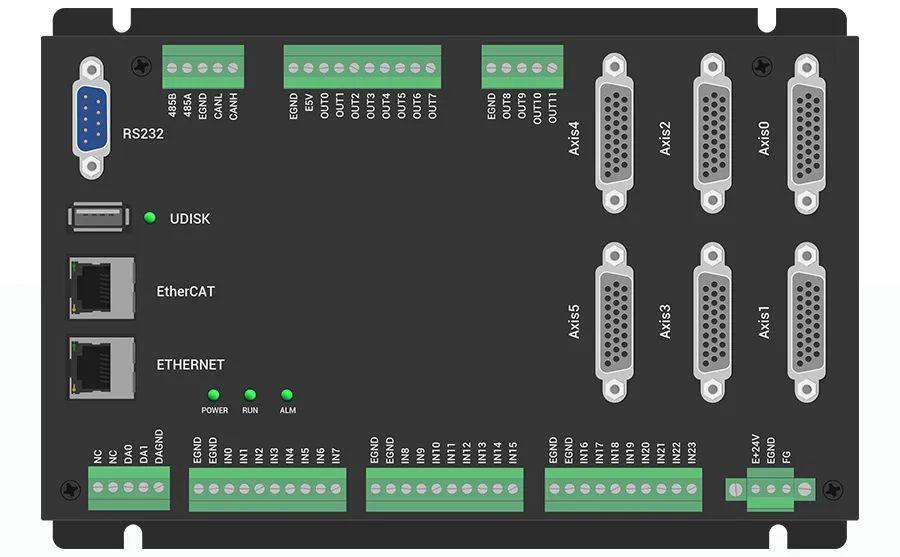
ZMC432最多可支持32轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC432支持32轴脉冲输入与编码器反馈,通用IO包含24路输入口和12个输出口;2路AD,2路DA;其中特定输出口支持高速PWM控制。
ZMC432通过EtherCAT和CAN总线进行硬件资源扩展,可扩展至4096路输入和4096路输出。
ZMC408CE功能简介
ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
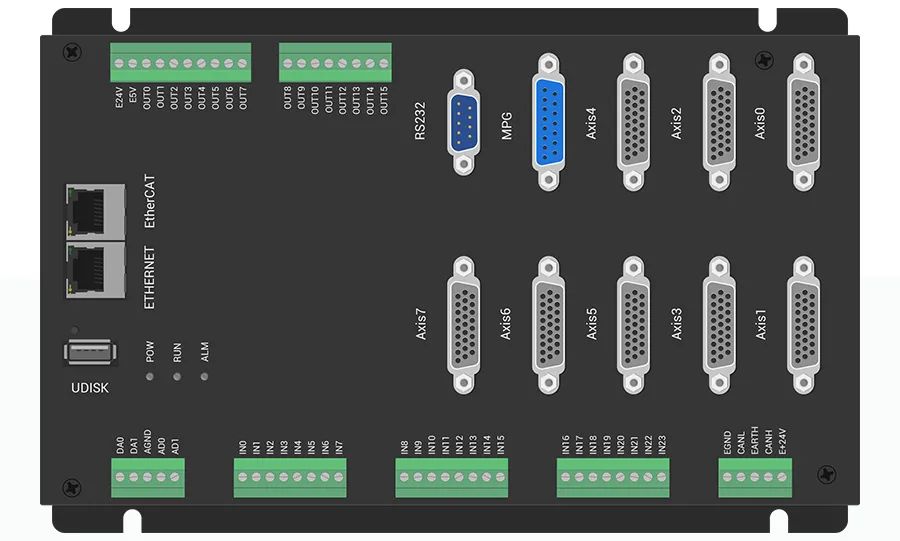
ZMC408CE支持8轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC408CE支持8轴运动控制,可采用脉冲轴(带编码器反馈)或EtherCAT总线轴,通用IO包含24路输入口和16路输出口,部分IO为高速IO,模拟量AD/DA各两路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8个通道的硬件比较输出、硬件定时器、运动中精准输出,还支持8通道PWM输出,对应的输出口为OUT0-7,支持8个通道同时触发硬件比较输出。
ZMC408CE可灵活进行硬件资源扩展,通过CAN或EtherCAT总线可扩展至4096个输入和4096个输出。
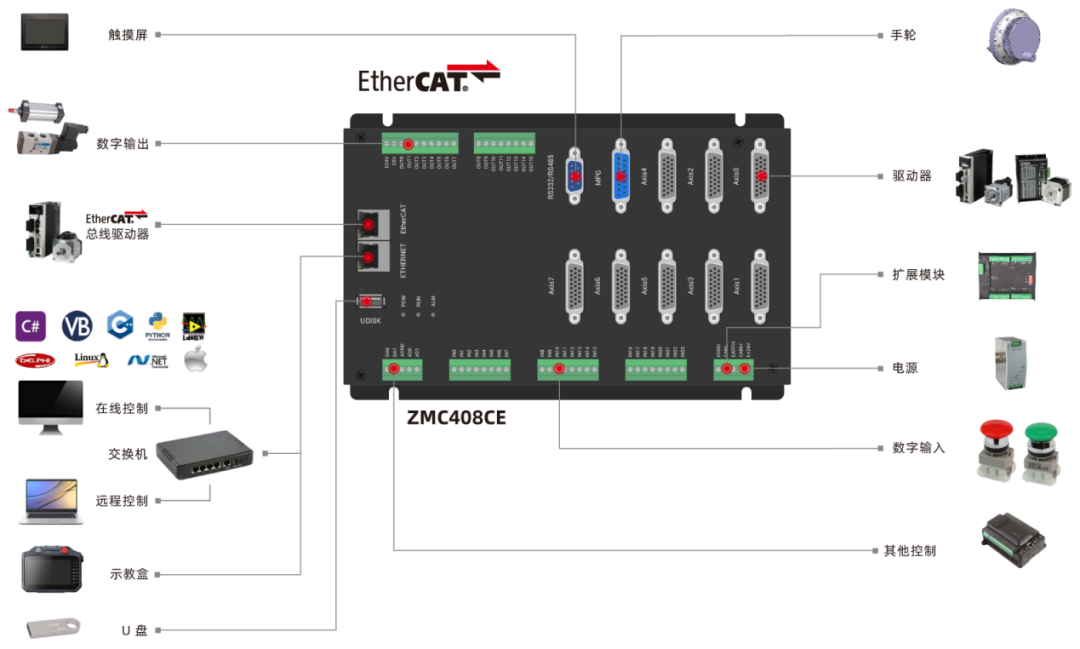
→ZMC432,ZMC408CE均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
上节课程中,我们介绍了ROS应用背景和Ubuntu18.04安装ROS Melodic详细过程,并且通过ROS编程案例“消息发布和订阅”来详细说明正运动技术EtherCAT运动控制器ROS的应用开发。
01 配置正运动技术动态链接库环境
1.添加动态链接库
在程序包目录zmotion(catkin_ws/src/zmotion/)下新建文件夹lib,存放动态链接库libzmotion.so。
在CMakeLists.txt中添加第三方库路径(build下):
link_directories(
lib
${catkin_LIB_DIRS}
)
并在CMakeLists.txt文件中链接动态链接库(调用链接库时文件名去掉lib和.so):
target_link_libraries(talker ${catkin_LIBRARIES} zmotion)
2.添加库函数zmcaux.cpp、zmotion.h、zmcaux.h
添加zmcaux.cpp文件到catkin_ws/src/zmotion/src目录下:
添加头文件zmotion.h、zmcaux.h到catkin_ws/src/zmotion/include/ zmotion目录下:
并在CMakeLists.txt中添加这三个库文件:
add_executable(talker src/talker.cpp src/zmcaux.cpp include/zmotion/zmotion.h include/zmotion/zmcaux.h )
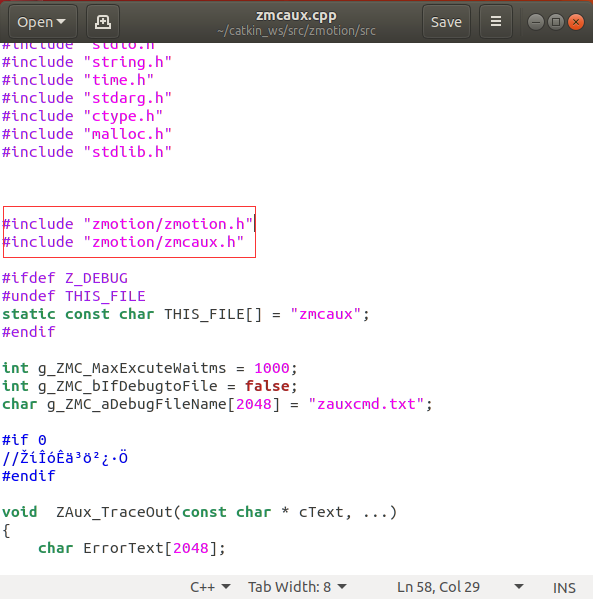
修改头文件引用,如下图所示(要填include文件的相对地址,zmotion为程序包名):
#include "zmotion/zmotion.h" #include "zmotion/zmcaux.h"
02 正运动控制器在ROS下的单轴运动
talker节点实现轴0的运动,并将其位置实时发送给listener节点,修改talker.cpp如下:
1.添加句柄和头文件
#include "zmotion/zmotion.h" #include "zmotion/zmcaux.h" ZMC_HANDLE g_handle=NULL;
2.通过EtherNET链接运动控制器
ZMC_LinuxLibInit(); //以太网(Ethernet)链接 char ipaddr[16] = {"192.168.0.11"}; int x =ZAux_OpenEth(ipaddr,&g_handle); //***ZMC ROS_INFO("以太网链接控制器:%d",x);//返回0则连接成功
3.实现单轴运动
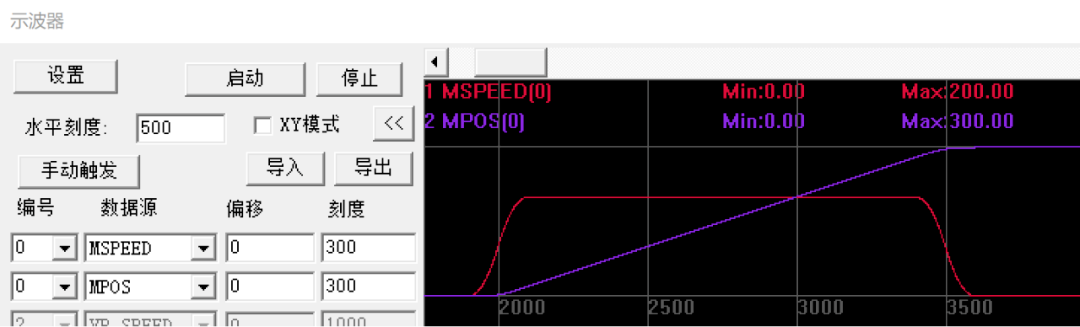
ZAux_Direct_SetSpeed(g_handle, 0, 200); //设置轴0运动速度为200units/s ZAux_Direct_SetAccel(g_handle, 0, 2000); //设置轴0加速度为2000units/s/s ZAux_Direct_SetDecel(g_handle, 0, 2000); //设置轴0减速度为2000units/s/s ZAux_Direct_SetSramp(g_handle, 0, 100); //设置轴0 S曲线时间100ms ZAux_Direct_Single_Move(g_handle, 0, 300); //轴0 相对与当前位置运动100 units
4.将实时位置发送给listener节点
float piValue;
while (ros::ok())
{
std_msgs::Float64 msg;
ZAux_Direct_GetMpos(g_handle, 0, & piValue);//获取时候
msg.data = piValue;
//输出,用来替代prinf/cout
ROS_INFO("Position is: %f", msg.data);
chatter_pub.publish(msg);
ros::spinOnce();
//休眠,来使发布频率为10Hz
loop_rate.sleep();
}
5.编译
cd ~/catkin_ws/ catkin_make
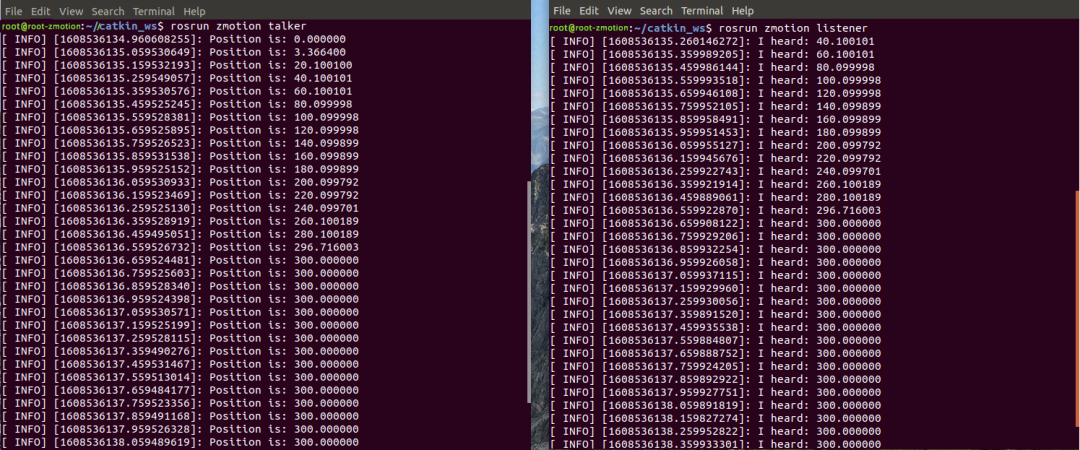
6.运行程序
//打开一个新终端 roscore //打开另一个新终端 cd ~/catkin_ws/ rosrun zmotion talker //打开另一个新终端 cd ~/catkin_ws/ rosrun zmotion listener运行效果如下,实时输出位置:
本次,正运动技术EtherCAT运动控制器在ROS上的应用(下),就分享到这里。
审核编辑:刘清
-
示波器
+关注
关注
113文章
6281浏览量
185777 -
运动控制器
+关注
关注
2文章
408浏览量
24803 -
上位机
+关注
关注
27文章
945浏览量
54983 -
ethercat
+关注
关注
18文章
732浏览量
38861 -
ROS
+关注
关注
1文章
280浏览量
17078
原文标题:EtherCAT运动控制器在ROS上的应用(下)
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

EtherCAT运动控制器在ROS上的应用开发案例(上)

EtherCat控制器
正运动技术运动控制器EtherCAT总线快速入门
EtherCAT总线运动控制的优势主要体现在哪?
EtherCAT运动控制器进行自定义API封装例程
EtherCAT总线运动控制的优势主要体现在哪?
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发

ZMC900E控制器之ROS2环境安装指南






 工商网监
工商网监
评论