 VASS06博途V7 FB 251 FB_Rob_Schweissen焊接控制器的使用方法
VASS06博途V7 FB 251 FB_Rob_Schweissen焊接控制器的使用方法
----------该块用来控制焊接设备。
该数据块通常会随自己的背景数据块一起被调用。
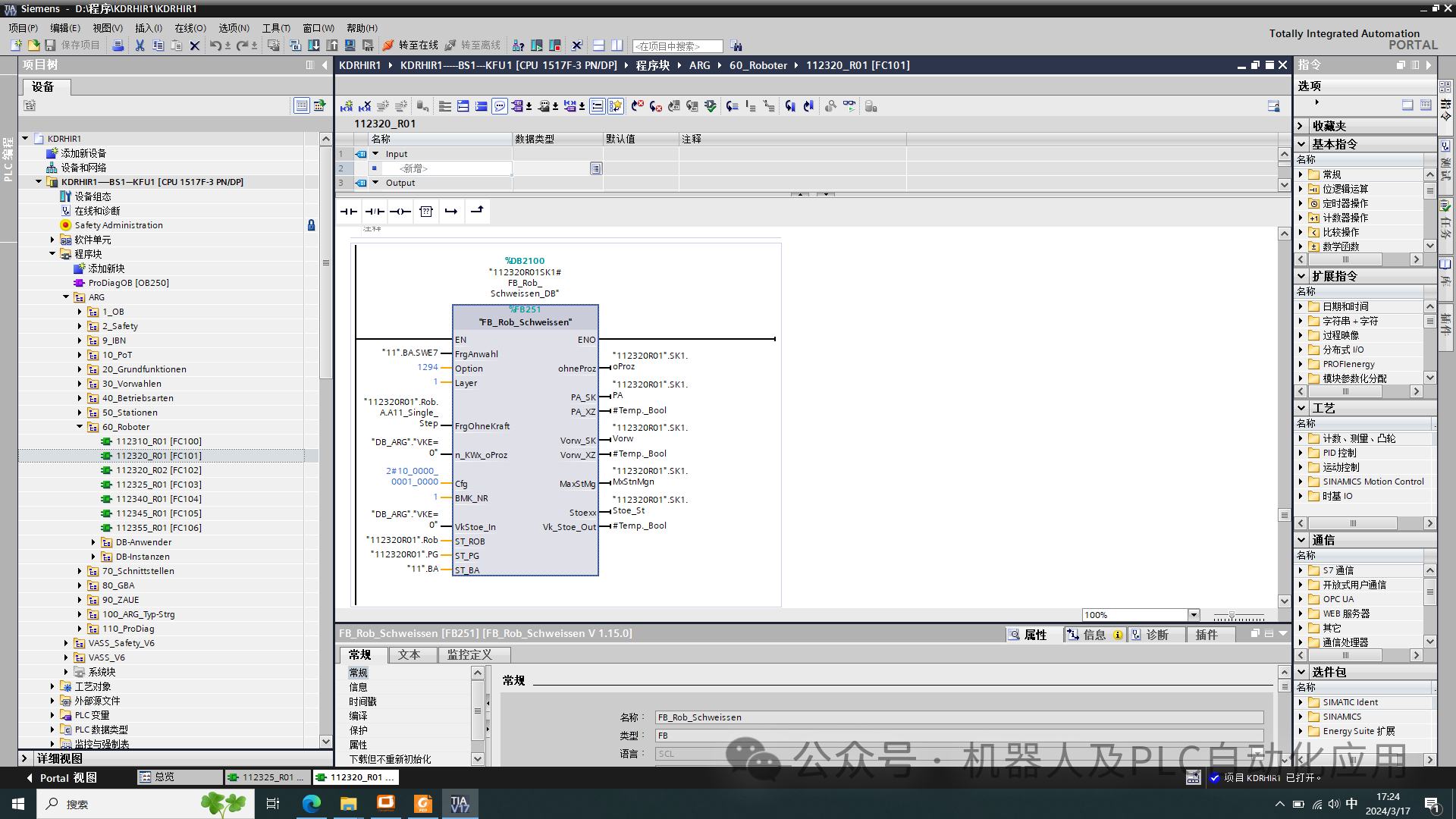
输入参数
| 名称 | 类型 | 说明 |
| FrgAnwahl | BOOL | 允许选择 |
| option选项 | INT | 选择选项 |
| Layer | INT | 可视化对象的 Layer 编号 |
| FrgOhneKraft | BOOL | 允许不使用力 |
| n_KWx_oProz | BOOL | 关闭次数寿命显示(自动更换电极帽) |
| _Cfg | BYTE | 组态位(参见组态位表格) |
| BMK_NR | BYTE | 用于在 VISU 上显示的 BMK 编号( 1、 2 或 3) |
| VkStoe_In | BOOL | 与 Vk_Stoe_Out 连锁的集中故障 |
组态位:_Cfg
| 比特位 | 状态 | 说明 |
| 00 | 1 | 焊钳 2 存在 |
| 01 | 1 | 焊钳 3 存在 |
| 02 | 1 | 焊钳 4 存在 |
| 03 | 1 | 铣削被禁用 |
| 04 |
1 0 |
如果是选项“ A” 、 “ CB” 、 “ E” 标签 SZ 如果是选项“ A” 、 “ CB” 、 “ E” 标签 EZ |
| 05 | 1 |
自动更换电极帽 (序列 120 在达到次数寿命之后没有外部维护) |
| 06 | 0 1 |
消息“ 当铣削时” 隐藏 显示 |
| 07 | 1 | 焊钳 5 存在 |
| 08 | 1 | 焊钳 6 存在 |
| 09 | 1 | 焊钳 7 存在 |
| 10 | 1 | 焊钳 8 存在 |
| 11 | 1 | ST_PG.Anw_Wart_ex 达到最大次数寿命时被禁用(自动更换电极帽) |
| 12 | 1 | 对于凸焊螺母可在 VISU 上显示“ BMx” 而不是“ SZx” 或“ EZx” 。 |
| 13 | 1 | 在 VISU 上显示标签 RZ 而不是“ SZx” 或“ EZx” |
输出参数
| 名称 | 类型 | 说明 |
| ohneProz | BOOL | 无过程 |
| PA_SK | BOOL | 过程激活 焊接控制器 |
| PA_XZ | BOOL | 过程激活 焊钳 |
| Vorw_SK | BOOL | 焊接控制器预警 |
| Vorw_XZ | BOOL | 焊钳预警 |
| MaxStMg | BOOL | 达到最大次数寿命 |
| Stoexx | BOOL | 故障 |
| Vk_Stoe_Out | BOOL | 连锁故障 |
输入和输出参数
| 名称 | 类型 | 说明 |
| ST_ROB | ST_Rob | 机器人结构 |
| ST_PG | ST_PG | 过程设备传送结构 |
| ST_BA | ST_Betriebsarten | 运行模式传送结构 |
外部变量引用:
全局变量
这些变量均被表示为“ VAR_EXTERNAL” , 并且已在全局变量表中声明。
| 名称 | 类型 | 说明 |
| PC_AKTIV | DWORD | FB-Visu 的活动 DWord |
| GlobAnwProz | AR_GlobAnwRP | 全局可视化按钮, Layer 和 bPrio |
“ FrgAnwahl" (BOOL)
需要用于取消和选择过程(操作允许按钮)。
参见取消和选择过程。
“ 选项” (INT)
视过程设备在机器人的哪个寻址范围内而定,必须在这里设置正确的选项。
使用活动机器人接口时可以从选项范围( “ A” - “ F” 或“ 1” -“ 12” ) 中选择选项。通过输入参数“ BMK_Nr”形成过程名称。
输入选项“ 1” ( 或“ A” ) 作为整数值:“ 1611” ( 或 “ 1612” ), 即接口宽度为 1( 或 2) 的起始地址 161。
该过程的有效值:
| 过程 |
“ 选 项” |
|
伺服焊钳 1 EZ1/SZ1/RZ1 焊接控制器 1 SK1 |
“ A" |
|
伺服焊钳 2 EZ2/SZ2/RZ2 焊接控制器 2 SK2 |
“ C" |
|
伺服焊钳 3 EZ3/SZ3/RZ3 焊接控制器 3 SK3 |
“ E" |
|
气动焊枪 1 PZ1 焊接控制器 1 SK1 |
“ 1" |
|
气动焊枪 2 PZ2 焊接控制器 2 SK2 |
“ 5" |
|
气动焊枪 3 PZ3 焊接控制器 3 SK3 |
“ 9" |
| 选项 AB | 1294 | 选项 A |
| 选项 B | ||
| 选项 CD | 1614 | 选项 C |
| 选项 D | ||
| 选项 EF | 1934 | 选项 E |
| 选项 F |
option选项说明 :
| 1292 | 选项 1 | 1291 | 129 - 136 |
| 选项 2 | 1371 | 137 - 144 | |
| 1452 | 选项 3 | 1451 | 145 - 152 |
| 选项 4 | 1531 | 153 - 160 | |
| 1612 | 选项 5 | 1611 | 161 - 168 |
| 选项 6 | 1691 | 169 - 176 | |
| 1772 | 选项 7 | 1771 | 177 - 184 |
| 选项 8 | 1851 | 185 - 192 | |
| 1932 | 选项 9 | 1931 | 193 - 200 |
| 选项 10 | 2011 | 201 - 208 | |
| 2092 | 选项 11 | 2091 | 209 - 216 |
| 选项 12 | 2171 | 217 - 224 |
“ Layer ” (INT)
该可视化对象位于某个 Layer 中。由可视化将该 Layer 编号告知 PLC。现在例如为了让全局选择正确发挥作用,块必须知道可视化对象位于哪个 Layer 中。
PA_XZ" (BOOL)
焊钳过程激活。
“ PA_XZ ” = FALSE 过程未激活。
“ PA_XZ" = TRUE 过程激活, 或者焊钳正在焊接、 铣削或更换电极帽。
“ Vorw_SK" (BOOL)
焊接控制器预警。参见预警、达到最大次数寿命、故障显示。
“ Vorw_XZ" (BOOL)
焊钳预警。参见预警、达到最大次数寿命、故障显示。
“ MaxStMg" (BOOL)
达到最大次数寿命。参见预警、达到最大次数寿命、故障显示。
“ ST_ROB" (ST_Rob)
机器人结构。包含整个机器人界面。通过该结构可从过程设备读取数据并且写入到过程设备。
“ ST_PG" (ST_PG)
过程设备结构。机器人块 ("FB_Rob") 和过程设备块之间的通信。
“ ST_BA" (ST_Betriebsarten)
运行模式结构。主要包含确认信号
该数据块生成下列故障报告:
| 报告文本 | 优先级 | 原因/补救措施 |
| 跟随误差 | STE | 过程 (EZX / SPX/ RZX) 发出信号:跟随误差 |
| 焊钳预警 | MS1 | 过程 (EZX / SPX/ RZX) 发出信号:焊钳预警 |
| 润滑警告 | MS1 | 过程 (EZX) 发出信号:润滑警告 |
| 增力时间太长 | STE | 过程 (EZX / SPX/ RZX) 发出信号:增力时间太长 |
| 程序错误 / 错误的力预设值 | STE |
过程 (EZX / SPX/ RZX) 发出信号:程序错误 / 错误的力预设值 |
| 目标位置无效 | STE | 过程 (EZX / SPX/ RZX) 发出信号:目标位置无效 |
| 零件错误 | STE | 过程 (EZX / SPX/ RZX) 发出信号:零件错误 |
| 焊钳活动困难 | STE | 过程 (EZX / SPX/ RZX) 发出信号:焊钳活动困难 |
| 铣削不正常 | STE | 过程 (EZX / SPX/ RZX) 发出信号:铣削不正常 |
| 电极帽磨损 / 几何错误 | STE | 过程 (EZX / SPX/ RZX) 发出信号:电极帽磨损 / 几何错误 |
| 补偿系统错误 | STE | 过程 (EZX / SPX/ RZX) 发出信号:补偿系统错误 |
| 控制器/调节器错误 | STE | 过程 (EZX / SPX/ RZX) 发出信号:控制器/调节器错误 |
| 电机/调节器温度错误 | STE | 过程 (EZX) 发出信号:电机/调节器温度错误 |
| 集中故障 | STE | 过程 (EZX / SPX/ RZX) 发出信号:集中故障 |
| 温度监控 | STE | 过程 (PZX) 发出信号:温度监控 |
| 按钮开关缺失 | STE | 过程 (PZX) 发出信号:按钮开关缺失 |
| 卡夹显示 | STE | 过程 (PZX) 发出信号:卡夹显示 |
| 集中故障 | STE | 过程 (PZX) 发出信号:集中故障 |
| 电极帽时间寿命预警 | MS1 | 过程 (SKX) 发出信号:电极帽时间寿命预警 |
| 达到最大次数寿命 | SSE | 过程 (SKX) 发出信号:达到最大次数寿命 |
| 控制部分没有准备就绪 | STE | 过程 (SKX) 发出信号:控制部分没有准备就绪 |
| 焊接不正常 | STE | 过程 (SKX) 发出信号:焊接不正常 |
| 在序列中侵犯警告限 | STE | 过程 (SKX) 发出信号:在序列中侵犯警告限 |
| 触发了剩余电流监控 | STE | 过程 (SKX) 发出信号:触发了剩余电流监控 |
| 相位监控 | STE | 过程 (SKX) 发出信号:相位监控 |
| 初级侧过电流 | STE | 过程 (SKX) 发出信号:初级侧过电流 |
| 电流传感器故障 | STE | 过程 (SKX) 发出信号:电流传感器故障 |
| 电压传感器故障 | STE | 过程 (SKX) 发出信号:电压传感器故障 |
| 过电流 DC 24 V | STE | 过程 (SKX) 发出信号:过电流 DC 24 V |
| 逆变器过热 | STE | 过程 (SKX) 发出信号:逆变器过热 |
| 焊点选择错误 | STE | 过程 (SKX) 发出信号:焊点选择错误 |
| 集中故障 | STE | 过程 (SKX) 发出信号:集中故障 |
| 取消 | MT0 | 过程已被取消 |
| 当铣削时 | MT0 | 过程 (EZX / SPX / PZX/ RZX) 发出信号:当铣削时 |
| 选择不使用增力 | MT0 | 过程 (EZX / SPX / PZX/ RZX) 选择了不使用增力 |
| 选项:无效 | STE |
在输入参数“ Option” 上设置的选项包含不允许的字符。 补救办法: 使用允许的字符。 允许适用下列字符: “ 1", "2", "3", "4", "5", "6", "7", "8", "9", "0" |
|
选项:仅 A、 1、 C、 5、 E、 9 可 以 |
STE | 在输入参数“ Option” 上设置的选项不允许在该过程中使用。 |
伺服气动或电动焊钳 I/O 总览(机器人 Slave 接口)
|
选项 A 焊钳 1 (EZ1 / SZ1) |
选项 C 焊钳 2 (EZ2 / SZ2) |
选项 E 焊钳 3 (EZ3 / SZP3) |
输入的注释 | 输出的注释 |
| E/A 129 | E/A 161 | E/A 193 | 选择不使用增力 | 过程激活 |
| E/A 130 | E/A 162 | E/A 194 | 选择铣削 | 当铣削时 |
| E/A 131 | E/A 163 | E/A 195 | 预留 | 跟随误差 |
| E/A 132 | E/A 164 | E/A 196 | 选择焊钳 1/ 5 | 焊钳预警 |
| E/A 133 | E/A 165 | E/A 197 | 选择焊钳 2/ 6 |
EZX:润滑警告 SPX:气缸预警 |
| E/A 134 | E/A 166 | E/A 198 | 选择焊钳 3/ 7 | 增力时间太长 |
| E/A 135 | E/A 167 | E/A 199 | 选择焊钳 4/ 8 |
程序错误 / 错误的力预设值 |
| E/A 136 | E/A 168 | E/A 200 | 选择焊钳切换 5-8 | 目标位置无效 |
| E/A 137 | E/A 169 | E/A 201 | 预留 | 零件错误 |
| E/A 138 | E/A 170 | E/A 202 | 预留 | 焊钳活动困难 |
| E/A 139 | E/A 171 | E/A 203 | 预留 | 铣削不正常 |
| E/A 140 | E/A 172 | E/A 204 | 预留 |
电极帽磨损 / 几何错 误 |
| E/A 141 | E/A 173 | E/A 205 | 预留 | 补偿系统错误 |
| E/A 142 | E/A 174 | E/A 206 | 预留 | 控制器/调节器错误 |
| E/A 143 | E/A 175 | E/A 207 | 预留 |
EZX:电机/变压器温度 错误 SPX:压缩空气/变压器 温度错误 |
| E/A 144 | E/A 176 | E/A 208 | 预留 | 集中故障 |
焊接控制器 I/O 总览(机器人 Slave 接口)
|
选项 A / 1 焊接 控制器预警 1 (SK1) |
选项 C / 5 焊接 控制器预警 2 (SK2) |
选项 E / 9 焊接 控制器预警 3 (SK3) |
输入的注释 | 输出的注释 |
| E/A 145 | E/A 177 | E/A 209 |
选择不使用焊 接 |
过程激活 |
| E/A 146 | E/A 178 | E/A 210 | 日志开始 | 铣削请求 |
| E/A 147 | E/A 179 | E/A 211 | 预留 | 电极帽时间寿命预警 |
| E/A 148 | E/A 180 | E/A 212 | 预留 | 达到最大次数寿命 |
| E/A 149 | E/A 181 | E/A 213 | 预留 | 控制部分没有准备就绪 |
| E/A 150 | E/A 182 | E/A 214 | 预留 | 焊接不正常 |
| E/A 151 | E/A 183 | E/A 215 | 预留 | 在序列中侵犯警告限 |
| E/A 152 | E/A 184 | E/A 216 | 预留 | 触发了剩余电流监控 |
| E/A 153 | E/A 185 | E/A 217 | 预留 | 相位监控 |
| E/A 154 | E/A 186 | E/A 218 | 预留 | 初级侧过电流 |
| E/A 155 | E/A 187 | E/A 219 | 预留 | 电流传感器故障 |
| E/A 156 | E/A 188 | E/A 220 | 预留 | 电压传感器故障 |
| E/A 157 | E/A 189 | E/A 221 | 预留 |
过电流 DC 24 V |
| E/A 158 | E/A 190 | E/A 222 | 预留 | 逆变器过热 |
| E/A 159 | E/A 191 | E/A 223 | 预留 | 焊点选择错误 |
| E/A 160 | E/A 192 | E/A 224 | 预留 | 集中故障 |



|
选项 A, 1 (SK1):“ A148 达到最大次数寿命 ” = TRUE 选项 C, 5 (SK2):“ A180 达到最大次数寿命 ” = TRUE 选项 E, 9 (SK3):"A212 达到了最大次数寿命" = TRUE |

|
选项 A, 1 (SK1):“ A149 控制部分没有准备就绪 ” = TRUE -或- 选项 A, 1 (SK1):“ A150 焊接不正常” = TRUE -或- 选项 A, 1 (SK1):“ A151 在序列中侵犯警告限 ” = TRUE -或- 选项 A, 1 (SK1):“ A152 触发了剩余电流监控 ” = TRUE -或- 选项 A, 1 (SK1):“ A153 相位监控 ” = TRUE -或- 选项 A, 1 (SK1):“ A154 初级侧过电流 ” = TRUE -或- 选项 A, 1 (SK1):“ A155 电流传感器故障 ” = TRUE -或- 选项 A, 1 (SK1):“ A156 电压传感器故障 ” = TRUE -或- 选项 A, 1 (SK1):“ A157 过电流 DC 24 V ” = TRUE -或- 选项 A, 1 (SK1):“ A158 逆变器过热 ” = TRUE -或- 选项 A, 1 (SK1):“ A159 相位监控 ” = TRUE -或- 选项 A, 1 (SK1):“ A160 集中故障 ” = TRUE |
机器人里关于焊接控制器文件夹:
SK_BASE_SL[1]=145;
GLOBAL INT O_SK_P_akt=0 ;
GLOBAL INT O_SK_Normfr=1 ;
GLOBAL INT O_SK_V_Stdm=2 ;
GLOBAL INT O_SK_M_Stdm=3 ;
GLOBAL INT O_SK_Bereit=4 ;
GLOBAL INT O_SK_WPS_nio=5 ;
GLOBAL INT O_SK_W_Folge=6 ;
GLOBAL INT O_SK_Diff_str=7 ;
GLOBAL INT O_SK_Phase_nio=8 ;
GLOBAL INT O_SK_Primaer=9 ;
GLOBAL INT O_SK_F_Strom=10 ;
GLOBAL INT O_SK_F_Spann=11 ;
GLOBAL INT O_SK_24V=12 ;
GLOBAL INT O_SK_Inverter=13 ;
GLOBAL INT O_SK_F_Anw=14 ;
GLOBAL INT O_SK_Sammel=15 ;
IF $OUT[O_R_Auto] AND $COULD_START_MOTION AND $TIMER_FLAG[Timer_MSG_SG] THEN
;控制单元未就绪A149
$OUT[SK_BASE_SL[SKNr]+O_SK_Bereit]=NOT $IN[SK_BASE_MA[SKNr]+I_SK_Bereit]
;焊接不合格A150
$OUT[SK_BASE_SL[SKNr]+O_SK_WPS_nio]=$FLAG[F_SK_S_niO[SKNr]]
;连续违反警告限制A151在序列中侵犯警告限
$OUT[SK_BASE_SL[SKNr]+O_SK_W_Folge]=$IN[SK_BASE_MA[SKNr]+I_SK_W_Folge]
;差动电流监测触发A152触发了剩余电流监控
$OUT[SK_BASE_SL[SKNr]+O_SK_Diff_str]=$IN[SK_BASE_MA[SKNr]+I_SK_Diff_str]
;相位监测A153 相位监控
$OUT[SK_BASE_SL[SKNr]+O_SK_Phase_nio]=$IN[SK_BASE_MA[SKNr]+I_SK_Phase_nio]
;A154 初级侧过电流
$OUT[SK_BASE_SL[SKNr]+O_SK_Primaer]=$IN[SK_BASE_MA[SKNr]+I_SK_Primaer]
;A155 电流传感器故障
$OUT[SK_BASE_SL[SKNr]+O_SK_F_Strom]=$IN[SK_BASE_MA[SKNr]+I_SK_F_Strom]
;电压传感器错误A156
$OUT[SK_BASE_SL[SKNr]+O_SK_F_Spann]=$IN[SK_BASE_MA[SKNr]+I_SK_F_Spann]
;¨¹流动24 V DC故障A157 过电流DC 24 V
$OUT[SK_BASE_SL[SKNr]+O_SK_24V]=$IN[SK_BASE_MA[SKNr]+I_SK_24V]
;逆变器水温故障A158 逆变器过热
$OUT[SK_BASE_SL[SKNr]+O_SK_Inverter]=$IN[SK_BASE_MA[SKNr]+I_SK_Inverter]
;点选择错误A159 相位监控
$OUT[SK_BASE_SL[SKNr]+O_SK_F_Anw]=$IN[SK_BASE_MA[SKNr]+I_SK_F_Anw]
;总故障A160 集中故障
$OUT[SK_BASE_SL[SKNr]+O_SK_Sammel]=NOT $IN[SK_BASE_MA[SKNr]+I_SK_Bereit] OR $IN[SK_BASE_MA[SKNr]+I_SK_WPS_nio] OR $IN[SK_BASE_MA[SKNr]+I_SK_W_Folge] OR $IN[SK_BASE_MA[SKNr]+I_SK_Diff_str] OR $IN[SK_BASE_MA[SKNr]+I_SK_Phase_nio] OR $IN[SK_BASE_MA[SKNr]+I_SK_Primaer] OR $IN[SK_BASE_MA[SKNr]+I_SK_F_Strom] OR $IN[SK_BASE_MA[SKNr]+I_SK_F_Spann] OR $IN[SK_BASE_MA[SKNr]+I_SK_24V] OR $IN[SK_BASE_MA[SKNr]+I_SK_Inverter] OR $IN[SK_BASE_MA[SKNr]+I_SK_F_Anw] OR $FLAG[F_SK_Sammel[SKNr]] OR B_KE_Sammel[SKNr]
ENDIF
审核编辑:刘清
-
控制器
+关注
关注
112文章
16350浏览量
177953 -
机器人
+关注
关注
211文章
28405浏览量
207021
原文标题:VASS06 博途V7 FB 251 FB_Rob_Schweissen焊接控制器的使用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
现场总线通信控制器FB3050的原理和应用
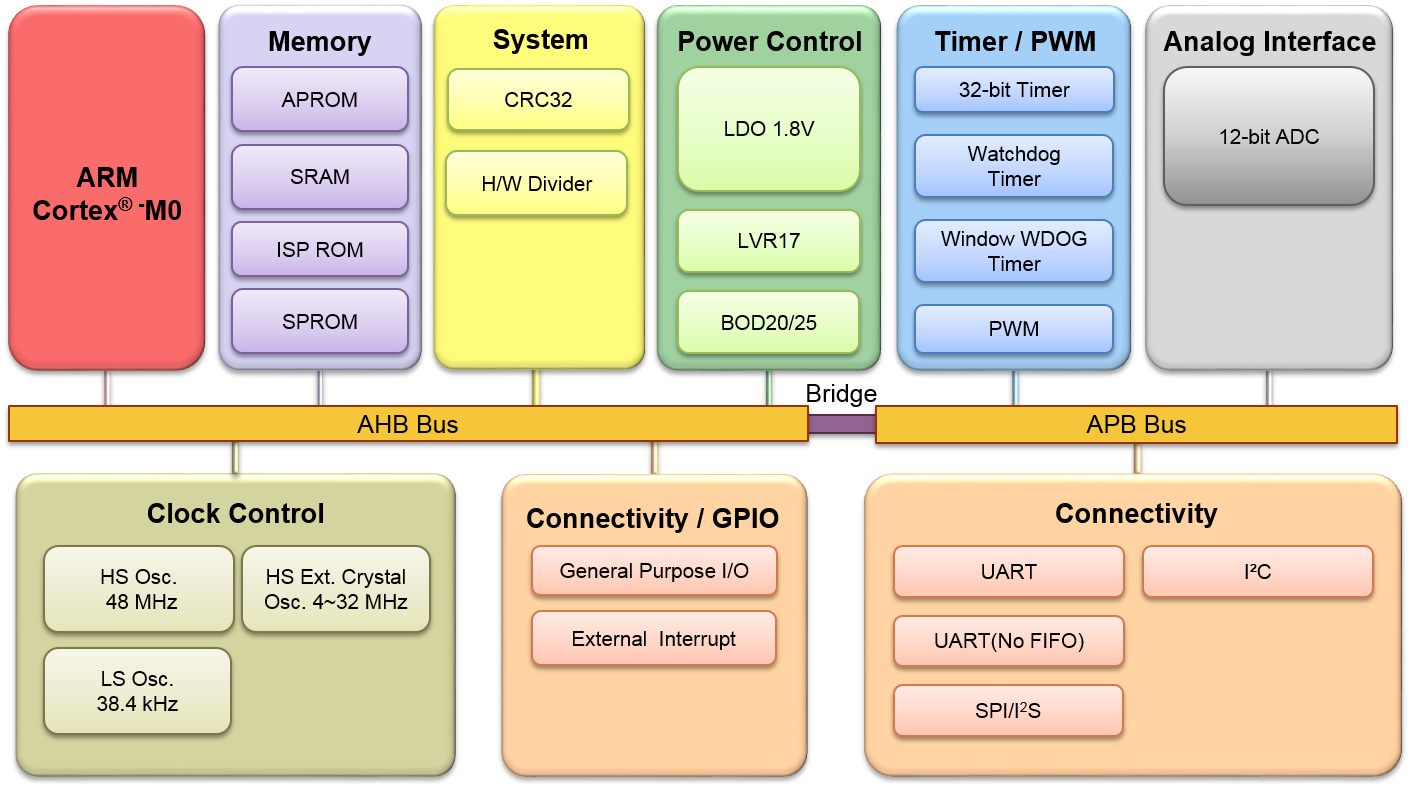
新唐科技M031FB0AE控制器
博途VASS06的CPU设置要求
关于博途VASS6的Profinet诊断
关于FB148系统诊断
OB FC FB块如何使用

VASS滚床输送控制FB453

西门子博途:调用FB(实例化)


西门子博途:SCL中FB模块的结构






 工商网监
工商网监
评论