 鸿蒙开发实战:【系统服务管理部件】
鸿蒙开发实战:【系统服务管理部件】
简介
samgr组件是OpenHarmony的核心组件,提供OpenHarmony系统服务启动、注册、查询等功能。
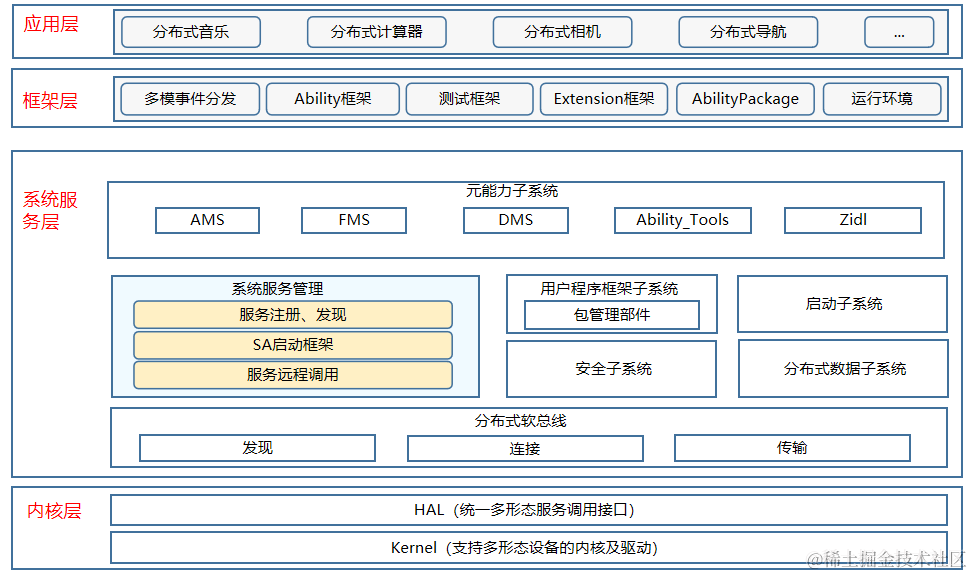
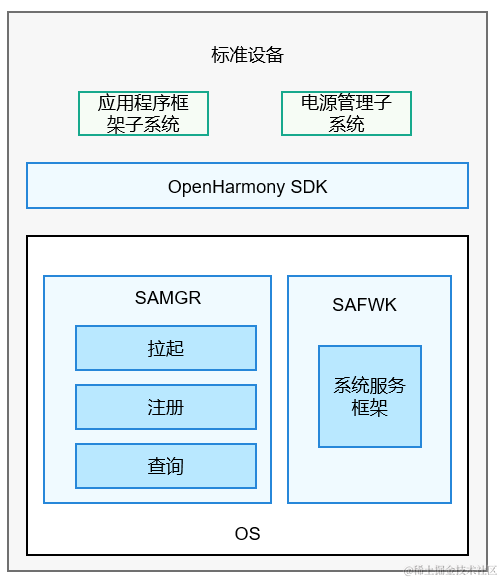
系统架构
图 1 系统服务管理系统架构图
目录
/foundation/systemabilitymgr
├── samgr
│ ├── bundle.json # 部件描述及编译文件
│ ├── frameworks # 框架实现存在目录
│ ├── interfaces # 接口目录
│ ├── services # 组件服务端目录
│ ├── test # 测试代码存放目录
│ ├── utils # 工具类目录
说明
samgr服务接收到sa框架层发送的注册消息,会在本地缓存中存入系统服务相关信息。
int32_t SystemAbilityManager::AddSystemAbility(int32_t systemAbilityId, const sptr< IRemoteObject >& ability, const SAExtraProp& extraProp) { if (!CheckInputSysAbilityId(systemAbilityId) || ability == nullptr) { HILOGE("AddSystemAbilityExtra input params is invalid."); return ERR_INVALID_VALUE; } { unique_lock< shared_mutex > writeLock(abilityMapLock_); auto saSize = abilityMap_.size(); if (saSize >= MAX_SERVICES) { HILOGE("map size error, (Has been greater than %zu)", saSize); return ERR_INVALID_VALUE; } SAInfo saInfo; saInfo.remoteObj = ability; saInfo.isDistributed = extraProp.isDistributed; saInfo.capability = extraProp.capability; saInfo.permission = Str16ToStr8(extraProp.permission); abilityMap_[systemAbilityId] = std::move(saInfo); HILOGI("insert %{public}d. size : %{public}zu", systemAbilityId, abilityMap_.size()); } RemoveCheckLoadedMsg(systemAbilityId); if (abilityDeath_ != nullptr) { ability- >AddDeathRecipient(abilityDeath_); } u16string strName = Str8ToStr16(to_string(systemAbilityId)); if (extraProp.isDistributed && dBinderService_ != nullptr) { dBinderService_- >RegisterRemoteProxy(strName, systemAbilityId); HILOGD("AddSystemAbility RegisterRemoteProxy, serviceId is %{public}d", systemAbilityId); } if (systemAbilityId == SOFTBUS_SERVER_SA_ID && !isDbinderStart_) { if (dBinderService_ != nullptr && rpcCallbackImp_ != nullptr) { bool ret = dBinderService_- >StartDBinderService(rpcCallbackImp_); HILOGI("start result is %{public}s", ret ? "succeed" : "fail"); isDbinderStart_ = true; } } SendSystemAbilityAddedMsg(systemAbilityId, ability); return ERR_OK; }对于本地服务而言,samgr服务接收到sa框架层发送的获取消息,会通过服务id,查找到对应服务的代理对象,然后返回给sa框架。
sptr< IRemoteObject > SystemAbilityManager::CheckSystemAbility(int32_t systemAbilityId) { if (!CheckInputSysAbilityId(systemAbilityId)) { HILOGW("CheckSystemAbility CheckSystemAbility invalid!"); return nullptr; } shared_lock< shared_mutex > readLock(abilityMapLock_); auto iter = abilityMap_.find(systemAbilityId); if (iter != abilityMap_.end()) { HILOGI("found service : %{public}d.", systemAbilityId); return iter- >second.remoteObj; } HILOGI("NOT found service : %{public}d", systemAbilityId); return nullptr; }动态加载系统服务进程及SystemAbility, 系统进程无需开机启动,而是在SystemAbility被访问的时候按需拉起,并加载指定SystemAbility。
3.1 继承SystemAbilityLoadCallbackStub类,并覆写OnLoadSystemAbilitySuccess(int32_t systemAbilityId, const sptr& remoteObject)、OnLoadSystemAbilityFail(int32_t systemAbilityId)方法。class OnDemandLoadCallback : public SystemAbilityLoadCallbackStub { public: void OnLoadSystemAbilitySuccess(int32_t systemAbilityId, const sptr< IRemoteObject >& remoteObject) override; void OnLoadSystemAbilityFail(int32_t systemAbilityId) override; }; void OnDemandLoadCallback::OnLoadSystemAbilitySuccess(int32_t systemAbilityId, const sptr< IRemoteObject >& remoteObject) // systemAbilityId为指定加载的SAID,remoteObject为指定systemAbility的代理对象 { cout < < "OnLoadSystemAbilitySuccess systemAbilityId:" < < systemAbilityId < < " IRemoteObject result:" < < ((remoteObject != nullptr) ? "succeed" : "failed") < < endl; } void OnDemandLoadCallback::OnLoadSystemAbilityFail(int32_t systemAbilityId) // systemAbilityId为指定加载的SAID { cout < < "OnLoadSystemAbilityFail systemAbilityId:" < < systemAbilityId < < endl; }3.2 调用samgr提供的动态加载接口LoadSystemAbility(int32_t systemAbilityId, const sptr& callback)。
// 构造步骤1的SystemAbilityLoadCallbackStub子类的实例 sptr< OnDemandLoadCallback > loadCallback_ = new OnDemandLoadCallback(); // 调用LoadSystemAbility方法 sptr< ISystemAbilityManager > sm = SystemAbilityManagerClient::GetInstance().GetSystemAbilityManager(); if (sm == nullptr) { cout < < "GetSystemAbilityManager samgr object null!" < < endl; return; } int32_t result = sm- >LoadSystemAbility(systemAbilityId, loadCallback_); if (result != ERR_OK) { cout < < "systemAbilityId:" < < systemAbilityId < < " load failed, result code:" < < result < < endl; return; }
说明:
1.LoadSystemAbility方法调用成功后,指定SystemAbility加载成功后会触发回调OnLoadSystemAbilitySuccess,加载失败触发回调OnLoadSystemAbilityFail。
2.动态加载的进程cfg文件不能配置为开机启动,需指定"ondemand" : true, 示例如下:
> {
> "services" : [{
> "name" : "listen_test",
> "path" : ["/system/bin/sa_main", "/system/profile/listen_test.json"],
> "ondemand" : true,
> "uid" : "system",
> "gid" : ["system", "shell"]
> }
> ]
> }
3.LoadSystemAbility方法适用于动态加载场景,其他获取SystemAbility场景建议使用CheckSystemAbility方法。
4.cfg里进程名称需要与SA的配置json文件里进程名保持一致
审核编辑 黄宇
-
鸿蒙
+关注
关注
57文章
2348浏览量
42829 -
OpenHarmony
+关注
关注
25文章
3718浏览量
16295
发布评论请先 登录
相关推荐
鸿蒙实战开发:【FaultLoggerd组件】讲解
鸿蒙原生应用/元服务实战-AGC团队账户
鸿蒙Flutter实战:07混合开发
鸿蒙原生开发手记:01-元服务开发
【专家问答】杨光明:鸿蒙系统研发工程师教你从0开发鸿蒙PCB开发板
《HarmonyOS原子化服务卡片原理与实战》清华大学出版社李洋著
鸿蒙原生应用/元服务开发-AGC分发如何下载管理Profile
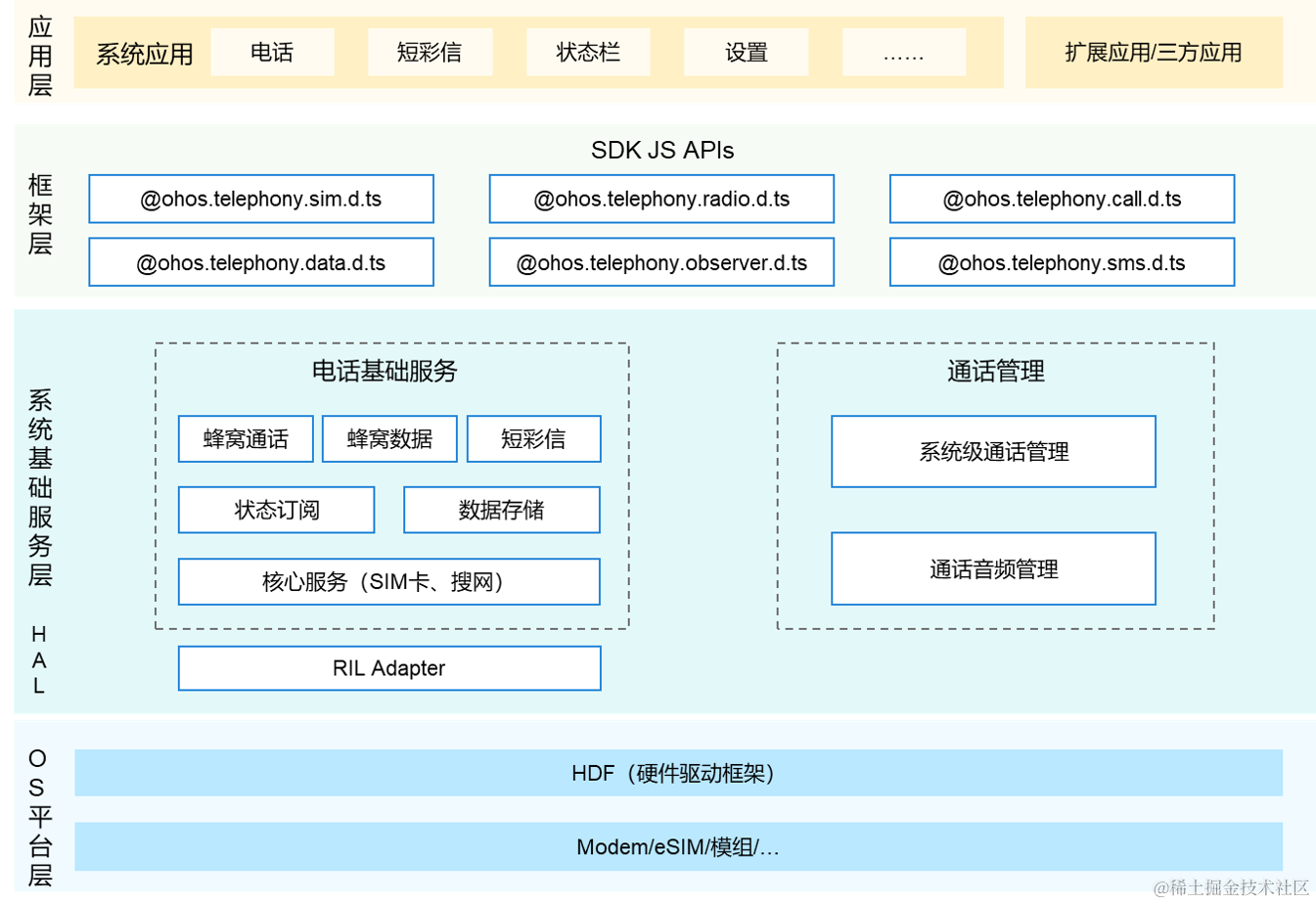
鸿蒙开发实战:【电话服务子系统】
鸿蒙实战开发学习【FaultLoggerd组件】
鸿蒙开发实战:【系统服务框架部件】






 工商网监
工商网监
评论