 可用于机器人触觉感知的零泊松比柔性传感器
可用于机器人触觉感知的零泊松比柔性传感器

超构材料因其超常的机械、物理、化学特性,在诸多领域具有重要的应用前景,但是如何将超构材料融入传感器件并实现超乎寻常的感知性能一直是柔性传感领域的难点。为解决这一问题,华中科技大学机械学院吴豪团队提出了弹性体薄膜泊松比调控新方法,通过调整结构参数控制弹性体薄膜的泊松比。
基于此方法制备的具有零泊松比超构材料结构的柔性传感器能够独立感知双轴信号。近日,上述相关成果“Flexible sensors with zero Poisson’s ratio(零泊松比柔性传感器)”发表于《国家科学评论》(National Science Review, NSR),华中科技大学机械学院博士生黄鑫为论文第一作者,吴豪教授为通讯作者。
这项工作将常见的正泊松比结构和负泊松比结构的特点进行融合,并通过结构特征的调节实现弹性体薄膜泊松比的控制,制备出具有零泊松比的柔性薄膜。同时,这种零泊松比结构构筑了仅对单轴应变灵敏的传感区域,在这些传感区域设计波浪形的应力集中结构增强传感灵敏度的同时进一步增强对其他轴信号的抗干扰特性。通过有限元方法分析不同结构参数下薄膜的泊松比,从而优化分析出能够实现零泊松比的最佳参数。
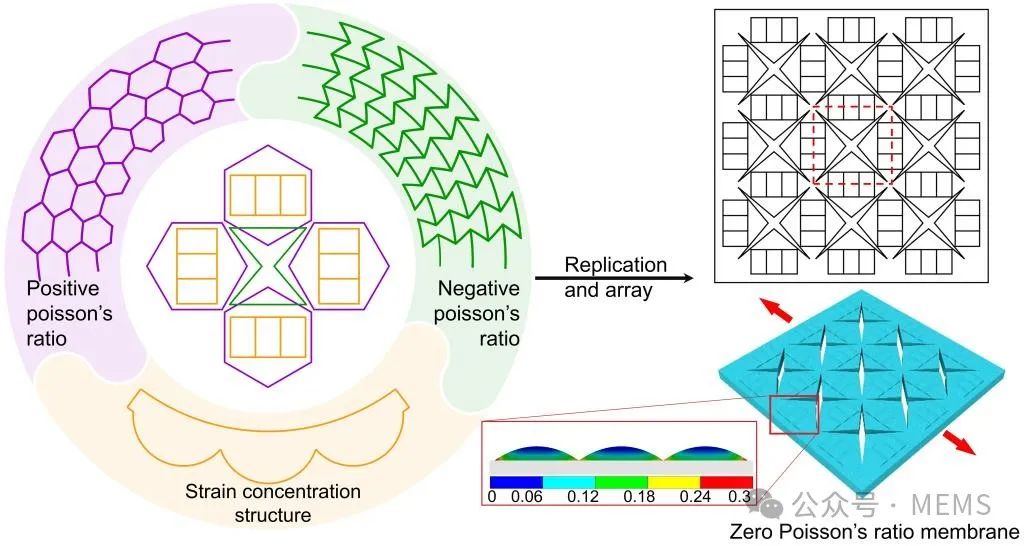
零泊松比结构设计方法
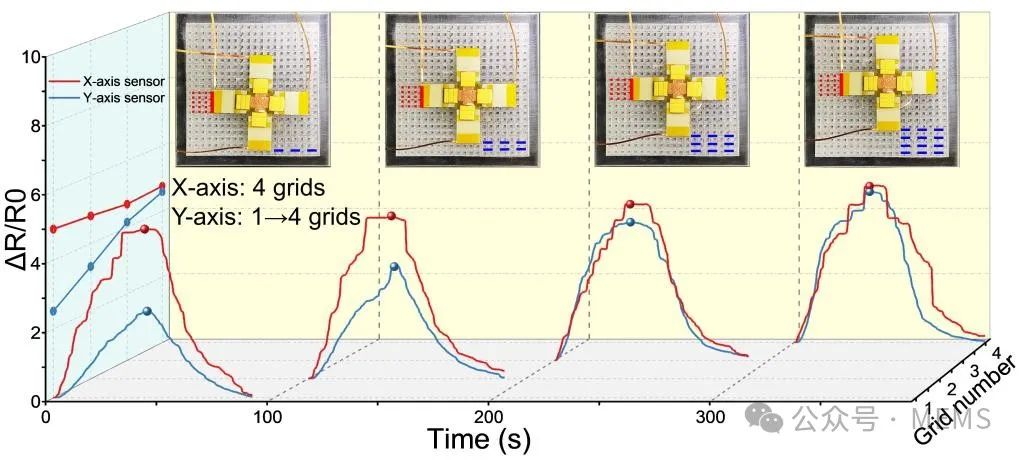
在单轴拉伸下,零泊松比薄膜中垂直于拉伸轴的传感单元承受局部应变近乎为零且不随整体拉伸应变的变化而变化。在双轴拉伸下,零泊松比薄膜的X轴传感单元的局部应变仅受X轴整体应变的影响,不同的Y轴整体应变对X轴传感单元的局部应变没有影响,从而实现对双轴信号的解耦感知。
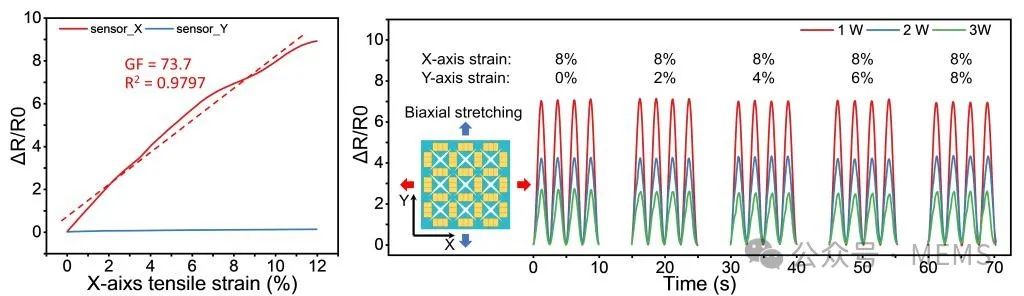
零泊松比传感器性能表征
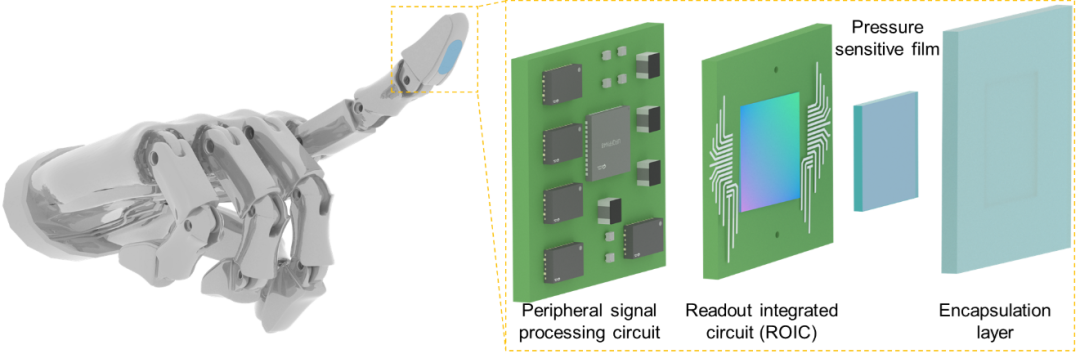
为了验证零泊松比传感器对双轴信号的感知能力,文中演示了贴附有该传感器的机械手抓取纸杯过程中的接触力变化。在抓取过程中,纸杯和机械手接触面的曲率会发生较大变化。对零泊松比传感器来说,这种曲率变化对垂直于弯曲方向的传感单元的影响很小,因此零泊松比传感器能够准确检测抓取纸杯过程中的接触力。
然而,对不具有零泊松比结构的普通柔性传感器来说,这种曲率变化对双轴传感单元均有较大影响,导致抓取接触力的错误感知。同时,贴附在仿生四指机械手上的零泊松比传感器能够准确区分机械手的正常工作和碰到障碍物状态,进一步证实零泊松比传感器具有在复杂大变形条件下准确感知触觉信号的能力。
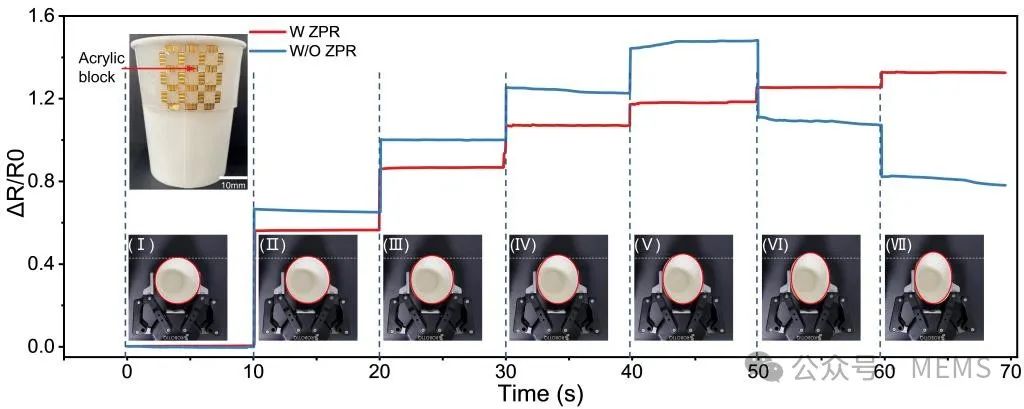
零泊松比传感器对抓握接触力的感知
另一方面,将零泊松比传感器贴附在热驱动软体机器人上进一步检验传感器对双轴弯曲信号的独立感知。该传感器能够准确感知软体机器人分别沿X轴和Y轴的运动距离,最终合成机器人整体的运动距离和方向,证明该传感器能够为软体机器人提供自身形变和运动状态的准确感知。
零泊松比传感器感知软机器人运动状态
论文链接:
https://doi.org/10.1093/nsr/nwae027
审核编辑:刘清
-
传感器
+关注
关注
2578文章
55811浏览量
795283 -
机器人
+关注
关注
214文章
31633浏览量
224410 -
软体机器人
+关注
关注
1文章
116浏览量
12155 -
柔性传感器
+关注
关注
1文章
125浏览量
4894
原文标题:零泊松比柔性传感器,可用于机器人触觉感知
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案

六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
安森美传感器芯片创新突破机器人感知边界
西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
2026电子皮肤赋能具身智能机器人专题论坛即将召开,共同探索触觉感知新未来
四川大学:研究一种具有四重感知能力的柔性机器人传感器

进入多模态时代!测量采样频率升至1000Hz,三大机器人触觉传感器新品发布
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
0.01°微小变化精准捕捉,机器人姿态传感器革新




评论