 康谋技术 |智能驾驶数据融合的时间同步关键技术
康谋技术 |智能驾驶数据融合的时间同步关键技术
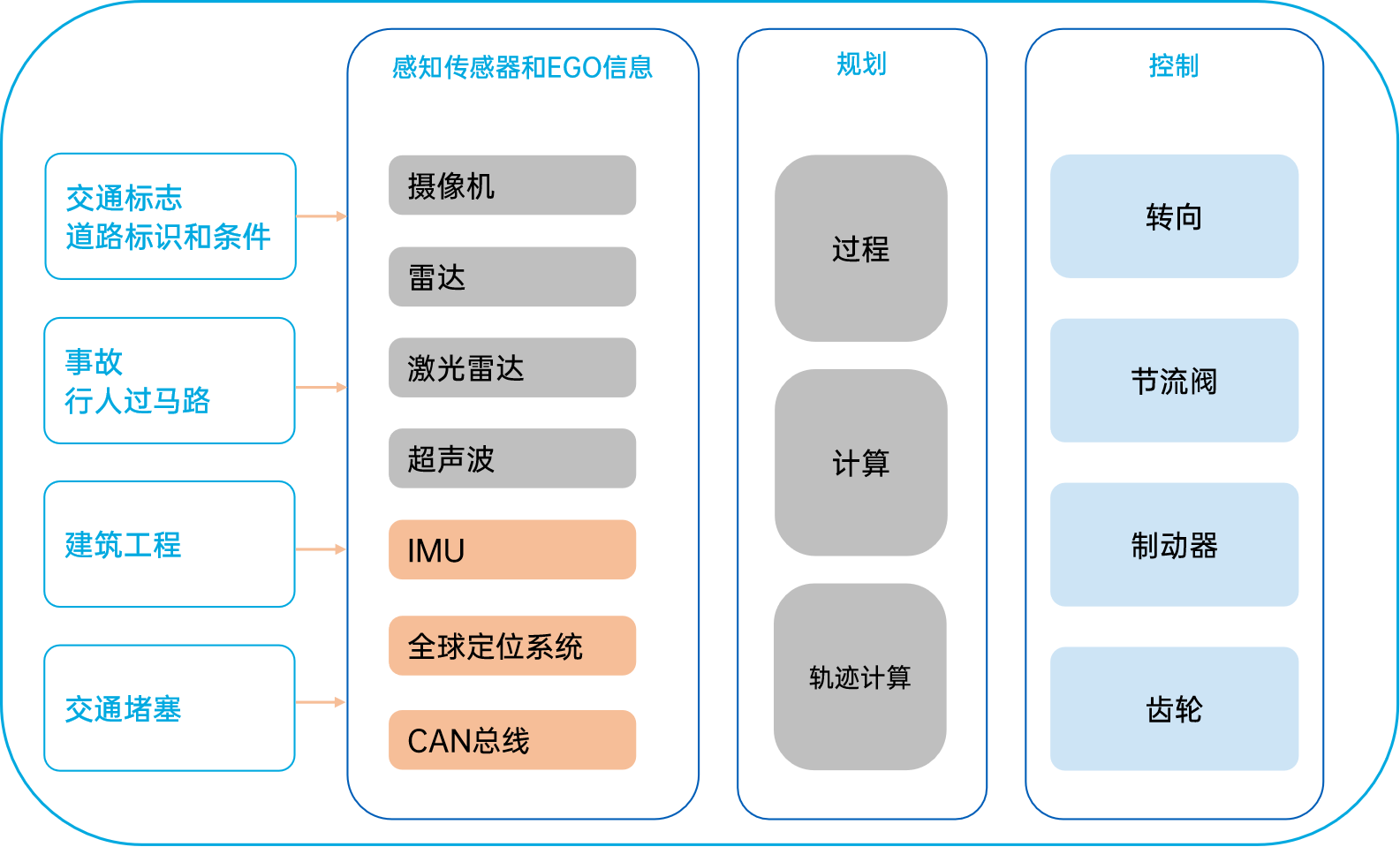
近年来,随着汽车电子系统的升级,人们对联网智能汽车的需求不断增长,高级驾驶辅助系统(ADAS)和自动驾驶技术正迅速改变汽车行业。然而,实现自动驾驶技术涉及感知、规划和执行三个关键层面,在汽车行驶于未知、动态环境中时,确保各种传感器数据的精确时间同步变得至关重要。
一、多传感器时间同步方式
在自动驾驶领域,各种传感器,如相机、激光雷达(Lidar)、GPS/IMU等,需要高度同步以确保数据的精确性。时间同步可以采用以下几种方式:
1、统一时钟源
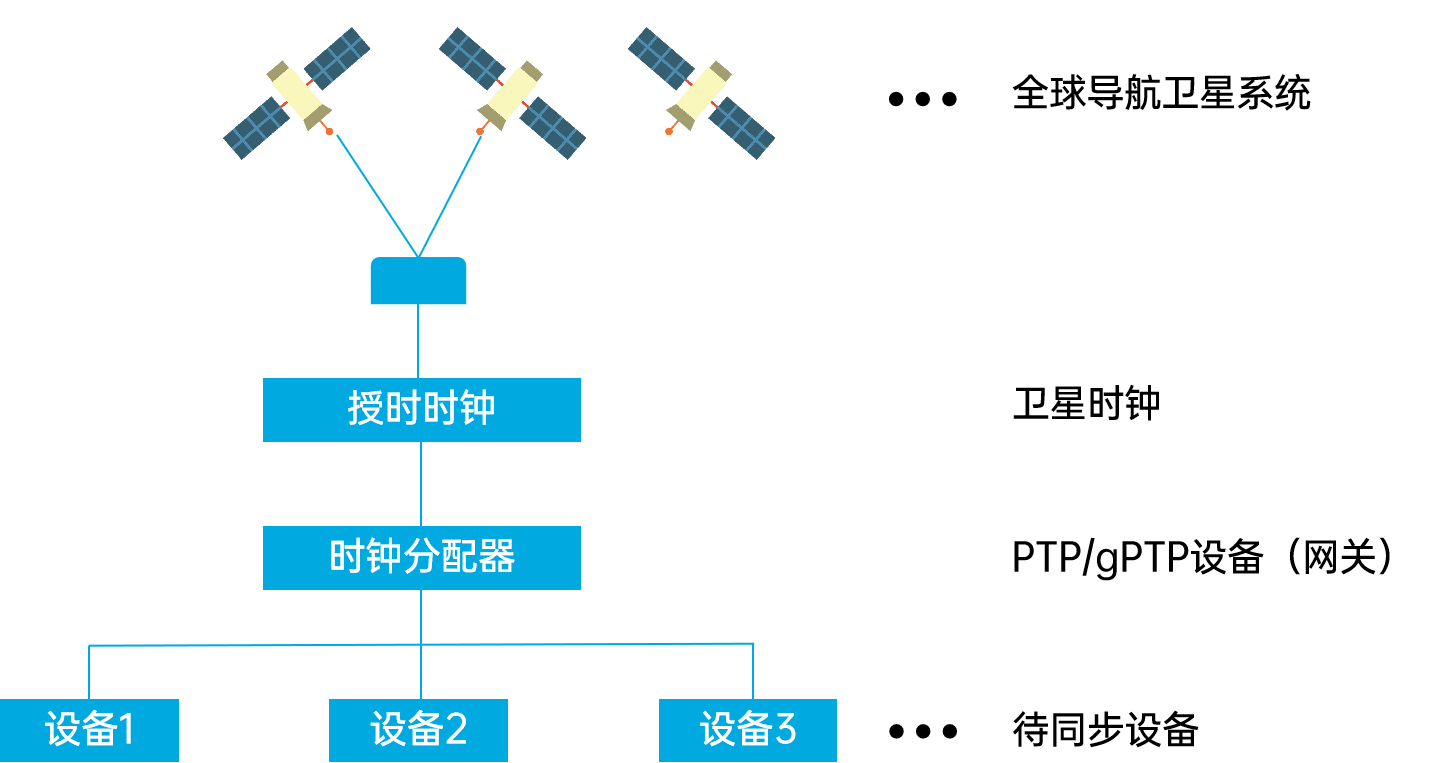
常见的方法是使用全球卫星定位系统(GPS)时间作为统一的时间源。GPS提供了高精度的时间信息,可以用来校准各传感器的时钟。这种方法能够确保各传感器的数据具有相同的时间基准,从而实现数据同步。主要包括基于GPS的“PPS+NMEA”和基于以太网的PTP(IEEE 1588)时钟同步协议。
(1)基于GPS的“PPS+NMEA”同步方式
以GPS作为统一时间源,通过RS232连接将GPS提供的时间信息传递给各传感器,以实现时间同步。然而,这种方法在多设备之间实现同步较为困难,因此在实际应用中存在一定限制。
(2)PTP(Precision Time Protocol)时钟同步协议
PTP是一种基于以太网的高精度时钟同步协议,可实现亚微秒级的时间同步。该协议采用硬件时间戳,从而显著减少软件处理时间,提高时间同步的精度。不仅如此,PTP可以运行在数据链路层(L2),避免了通过四层UDP协议栈的处理,进一步提高了时间同步的准确性,使其成为自动驾驶系统的理想选择。
2、硬件同步
硬件同步方法通常涉及使用专用硬件来确保传感器之间的时间同步。这种方法可以减少软件处理时间,提高同步精度。
3、软件同步
软件同步方法通过协议栈和网络通信来实现传感器之间的时间同步。虽然软件同步通常比硬件同步慢一些,但它仍然可以提供足够的精度,以满足自动驾驶系统的要求。
自动驾驶数据采集与测试方案
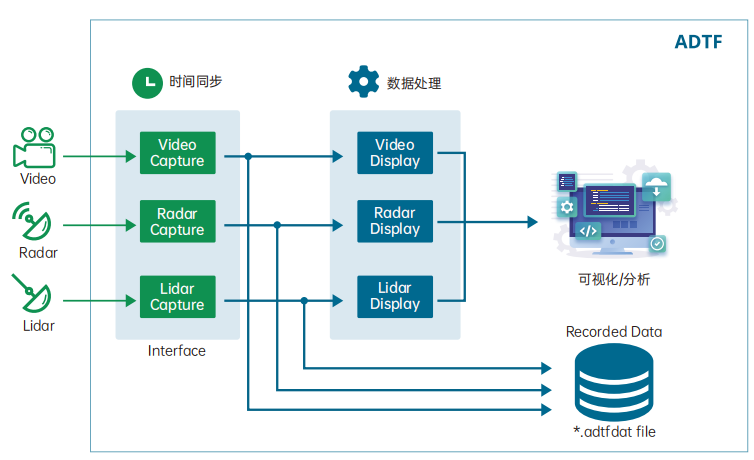
为了应对传感器数据的巨大量和时间同步的挑战,康谋提供一体化的数据采集与测试解决方案。
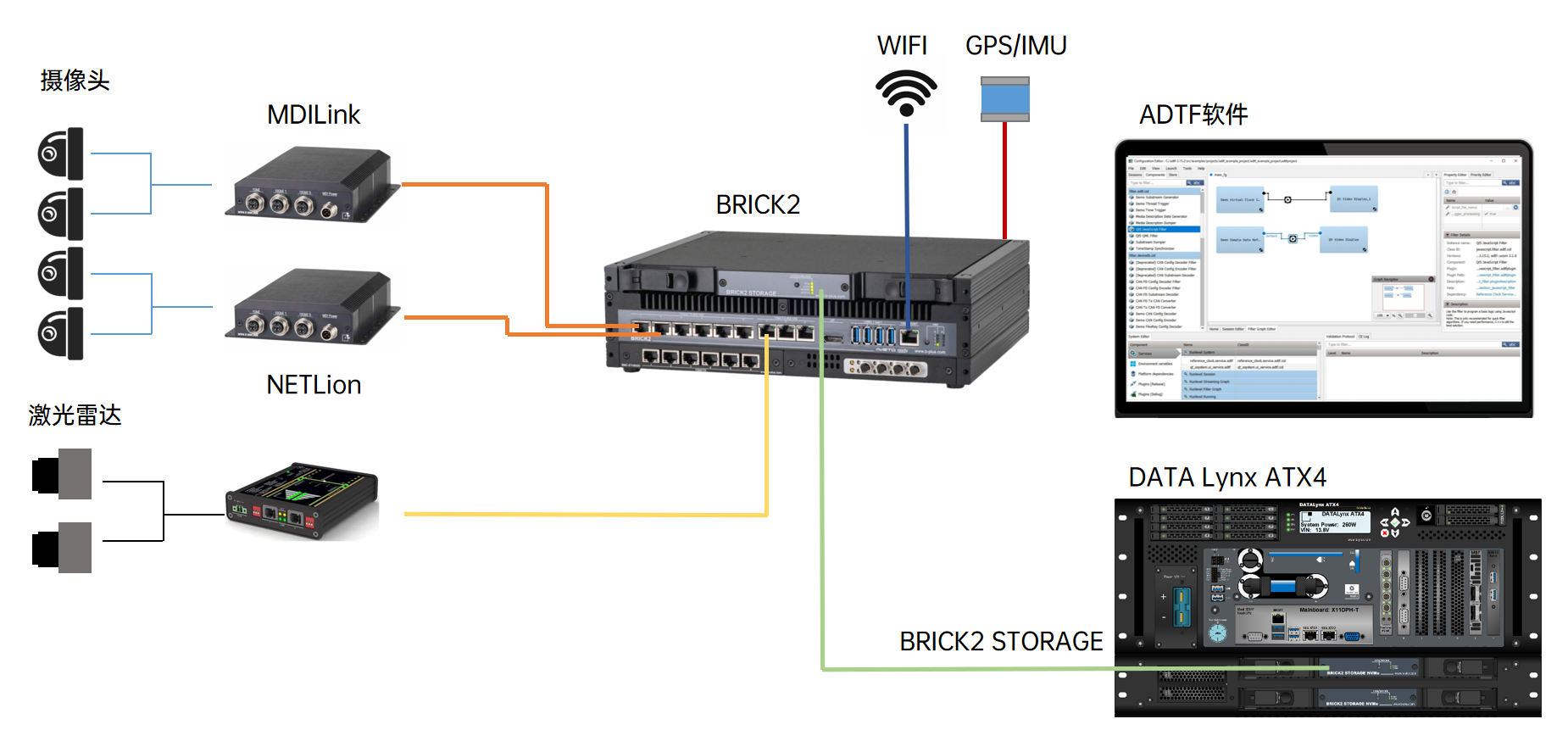
在这个过程中,XTSS软件发挥了关键作用。XTSS是一种高度精确的时间同步解决方案,可广泛配置和即插即用。它为每个数据包提供了时间戳,以确保数据的时间同步。这种系统可以确保整个系统的时钟都在相同的时间基准上运行,从而构建一个时间域。
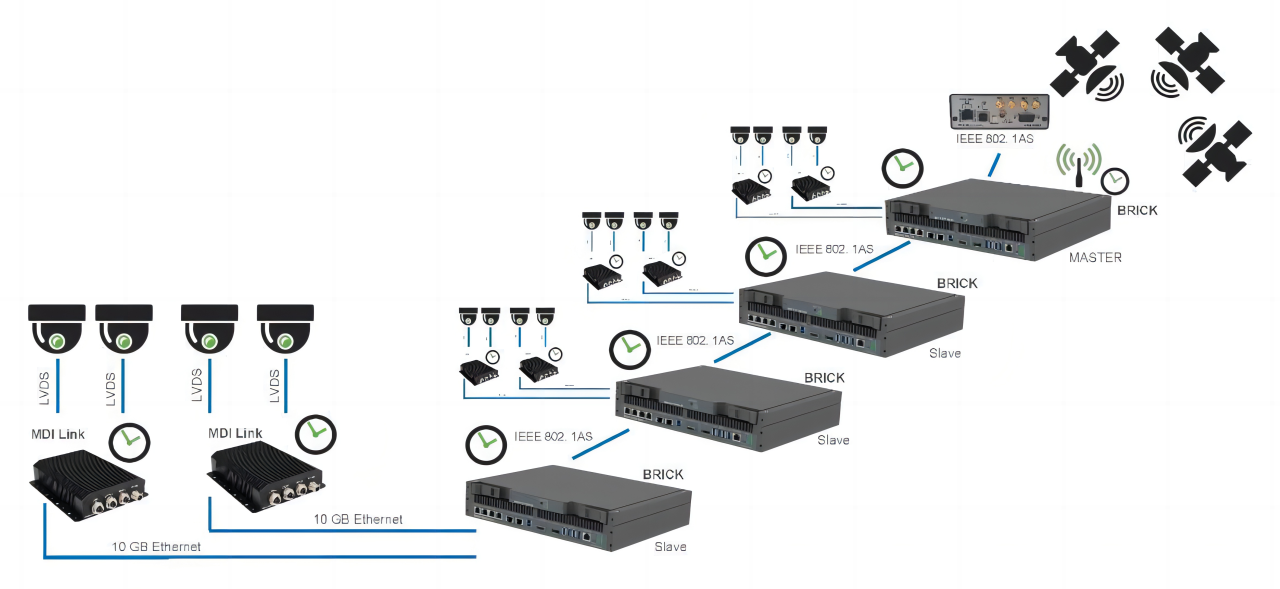
XTSS提供CTSS(集群时间同步服务)和PTSS(平台时间同步服务)。在CTSS中,通过以太网提供基于gPTP(IEEE 802.1AS-2020)和PTP(IEEE 1588v2)的同步,以确保不同设备之间的高精度时间同步。在PTSS中,各接口的时钟通过硬件机制同步,从而实现高度精确的时间同步。
自动驾驶领域的时间同步技术是确保各传感器数据一致性和准确性的关键。这项技术的应用有助于提高自动驾驶系统的性能和安全性,使智能驾驶成为可能。
-
AD
+关注
关注
27文章
868浏览量
150266 -
时间同步
+关注
关注
1文章
120浏览量
9951 -
adas
+关注
关注
309文章
2183浏览量
208629 -
数据融合
+关注
关注
0文章
45浏览量
10348 -
自动驾驶
+关注
关注
784文章
13784浏览量
166376
发布评论请先 登录
相关推荐
云计算HPC软件关键技术

康谋分享 | 汽车仿真与AI的结合应用

深度学习在自动驾驶中的关键技术
智能制造的关键技术有哪些?
康谋技术 | 自动驾驶:揭秘高精度时间同步技术(二)

自动驾驶:揭秘高精度时间同步技术(一)

康谋技术 |深入探讨:自动驾驶中的相机标定技术

未来已来,多传感器融合感知是自动驾驶破局的关键
康谋资讯 | ADTF助力高校科研,创新技术免费享用
康谋技术 | 智能驾驶数据融合的时间同步关键技术
康谋新闻丨走进康谋科技——您的自动驾驶解决方案合作伙伴






 工商网监
工商网监
评论