 一种可应用于智能穿戴、人形机器人的无漂移柔性压力传感器
一种可应用于智能穿戴、人形机器人的无漂移柔性压力传感器
2024年3月21日,南方科技大学材料科学与工程系郭传飞教授和力学与航空航天工程系杨灿辉助理教授研究团队合作开发了一种无漂移柔性压力传感器,解决了柔性压力传感器中由于软材料蠕变导致的难以精准测量静态压力的普遍性难题,相关论文以“Creep-free polyelectrolyte elastomer for drift-free iontronic sensing”为题发表在Nature Materials期刊上。论文通讯作者是杨灿辉、郭传飞,(共同)第一作者是何耘丰、程雨。
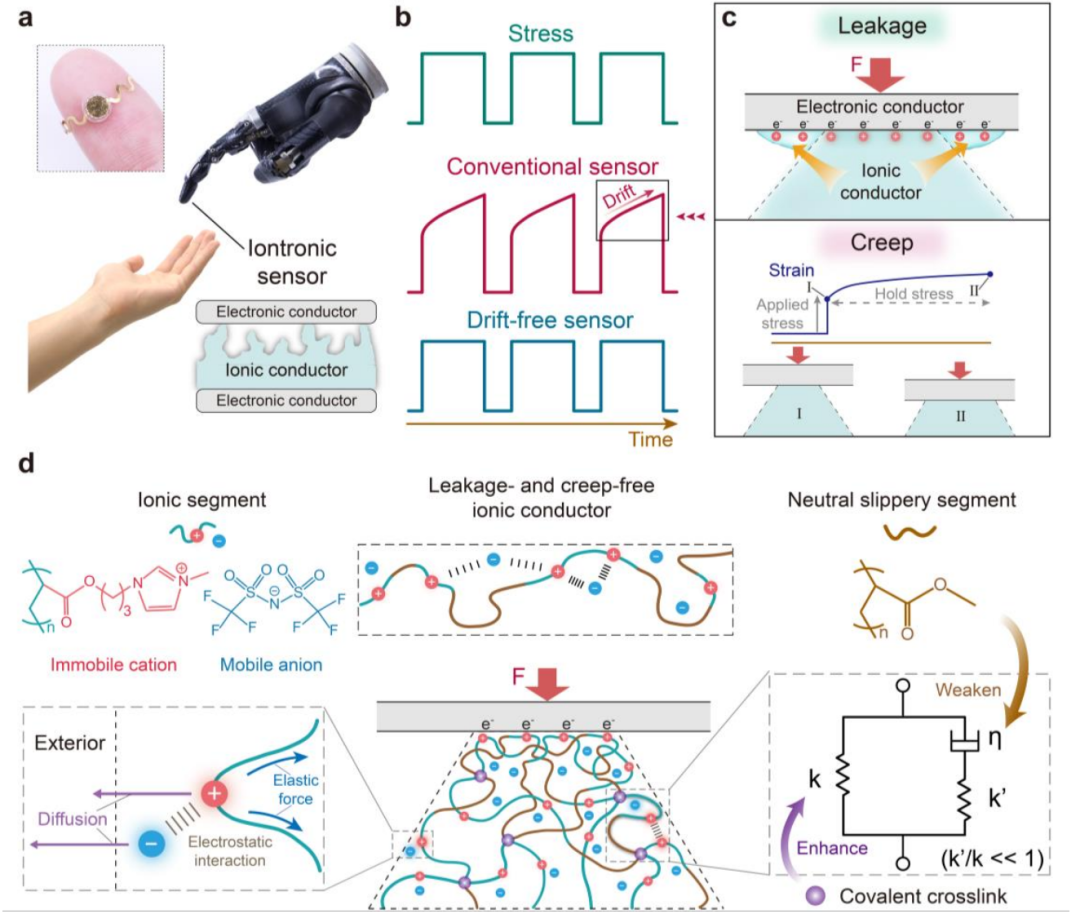
图1:无漂移柔性压力传感器的原理、材料和化学组成
柔性压力传感器可将压力转化为电信号,而“离-电型”柔性压力传感器——一种具有极高灵敏度的器件,更是在机器人触觉、虚拟现实以及可穿戴设备等领域有重要的应用价值(图1a)。但现有的柔性压力传感器普遍存在明显的信号漂移问题(图1b)。信号漂移一方面来自于离子凝胶的漏液,另一方面来自于软材料的蠕变(图1c)。因此,柔性压力传感器往往“测得灵敏”,但“测不准”,无法用于静态或准静态压力的精准计量,使得这种器件在诸多领域无法替代传统的硬质传感器。
针对上述挑战,研究团队基于软材料力学原理,从材料的分子结构入手,设计、制备了一种无泄漏、低蠕变的聚电解质离子导电弹性体,有效地抑制了离-电型柔性压力传感器的信号漂移。这种材料是一种共聚物,包含有带电的分子链段以及不带电的润滑中性链段(图1d)。前者把阳离子束缚在分子链上,以网络弹性阻碍离子的向外扩散,有效避免离子泄露;后者可有效降低分子链之间的静电吸引,大幅降低材料的蠕变。在上述分子结构的基础上,团队提高交联密度,进一步降低了材料的蠕变。
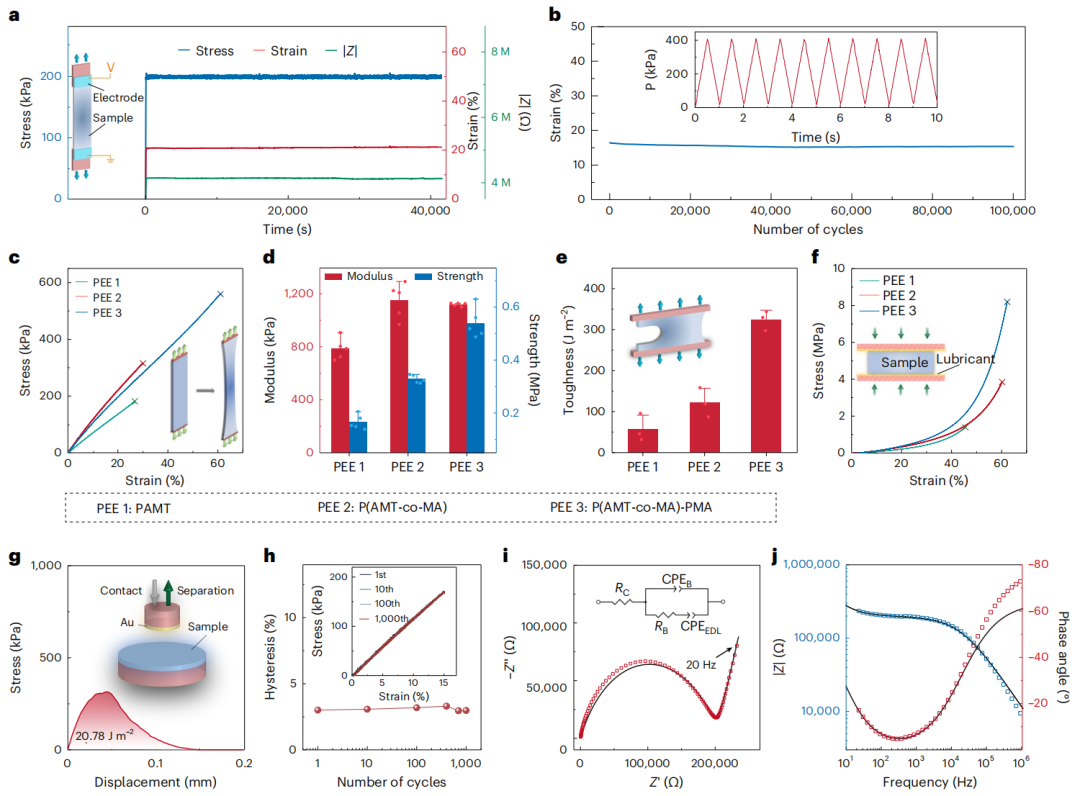
图2:聚电解质弹性体的特性
制备的离子导体是一种聚电解质弹性体(PEE),P(AMT-co-MA)-PMA,具有抗蠕变性。在200kPa拉应力下,样品保持稳定的机械和电气性能(例如拉伸应变和阻抗)(图2a);当受到峰值应力为400kPa、频率为1Hz的三角波循环载荷时,峰值应变在10万次循环中几乎没有变化(图2b)。研究团队一共制备了三种PEE,只含有带电分子链段的PAMT表示为PEE1,同时含有带电分子链段和不带电的可滑中性链段的P(AMT-co-MA)表示为PEE2,以及在PEE2基础上加入长链PMA增韧的P(AMT-co-MA)-PMA表示为PEE3。三种材料的单轴拉伸曲线如图2c所示。增韧的PEE3的性能得到显著提升,具有61.3%的断裂应变,560kPa的拉伸强度(图2d),323.5 J m-2的断裂能(图2e)和8.2 MPa的压缩强度(图2f)。PEE具有非粘性表面并且表现出低迟滞。PEE与金电极的粘附能为20.78 J m-2(图2g),在加卸载循环测试中,第一次和第1000次的应力-应变曲线几乎重叠,在1000次循环中平均迟滞<3%(图2h)。离子导体的电学性能同样至关重要,团队对PEE3进行交流阻抗测量并画出其奈奎斯特曲线(图2i)和波德相位图(图2j)。
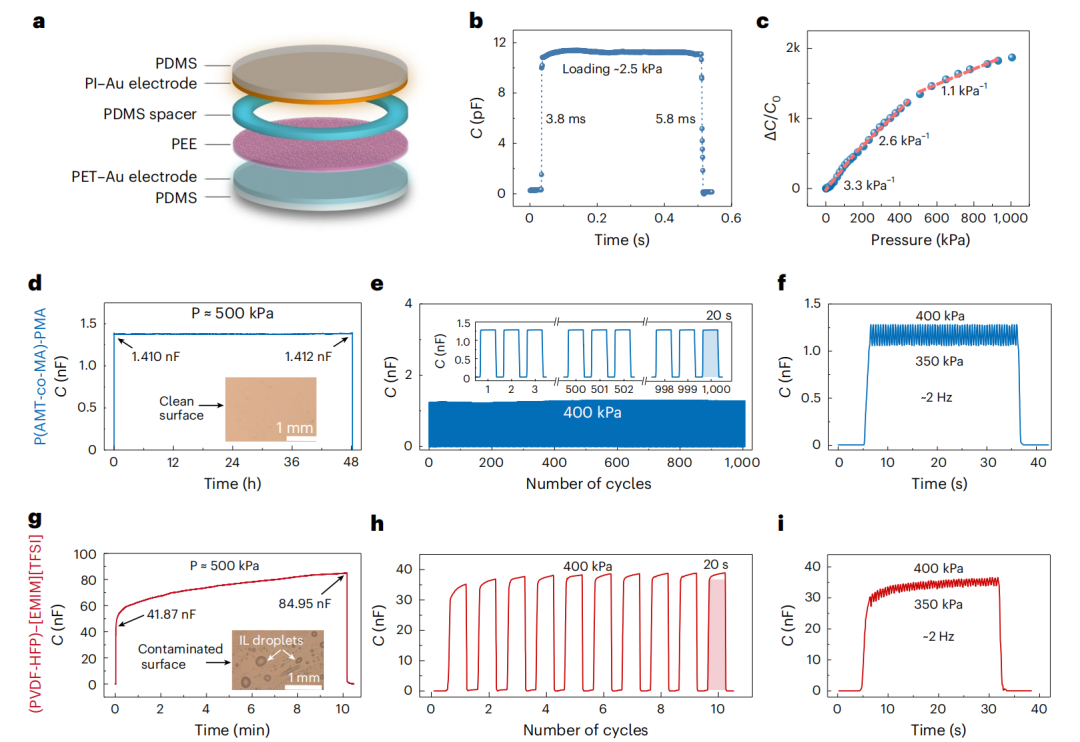
图3:离电传感器的特性
团队通过在两层金电极之间夹一层PEE来构建传感器(图3a)。当受到2.5 kPa的瞬间载荷时,传感器的响应时间约3.8 ms,恢复时间约5.8 ms(图3b)。传感器在0-1000 kPa范围内都表现出较高的灵敏度(图3c)。向传感器施加约500 kPa的静压,其电容在48小时内漂移量低于1%(图3d)。向传感器施加400kPa的方波循环载荷,传感器在总共1000个循环中的每个循环相应地输出方波信号(图3e)。团队也在更复杂的情况下验证了传感器的无漂移性能,通过在375 kPa的静压上叠加50 kPa的周期性波动,传感器的响应与刺激同相(图3f)。
作为对比,研究团队选用了目前广泛使用的离子凝胶(PVDF-HFP)-[EMIM][TFSI]进行比较,在500kPa的静态压缩下,电容信号在10分钟内漂移约102.9%(图3g)。其信号同时也在方波循环载荷中漂移(图3h),或在叠加静态和动态载荷的情况下漂移(图3i)。
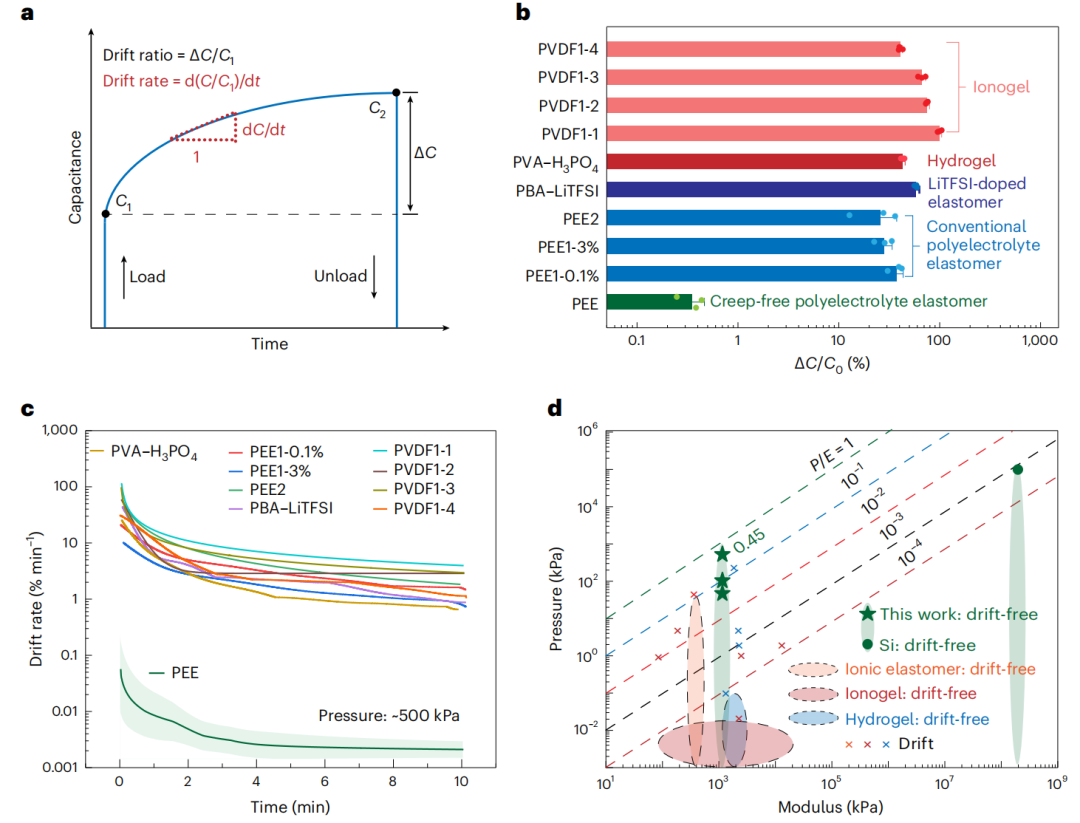
图4:各种离电传感器的漂移比和漂移率
研究团队提出了漂移比和漂移率两个指标来定量表征静压下的信号稳定性(图4a)。团队共制作了十种传感器,其离子导体分别为优化的PEE、三种未优化的PEE、四种离子凝胶、一种水凝胶以及一种锂盐掺杂弹性体。在500kPa静态压力下连续测试10分钟,基于优化PEE的传感器在10分钟内表现出约0.33%的平均漂移比,比所有其他传感器低两个数量级(图4b)。
此外,基于优化PEE的传感器在500kPa下的漂移率比其他传感器的漂移率低2-4个数量级(图4c)。研究人员采用传感器产生漂移行为时压力和其自身模量的比值,即P/E,来表征传感器在没有信号漂移的情况下工作的许用压力。基于优化PEE的传感器可以在0.45的P/E下工作,相比之下使用传统软材料的传感器和传统硅基传感器仅在低于10-4和10-3的P/E时实现无漂移传感(图4d)。
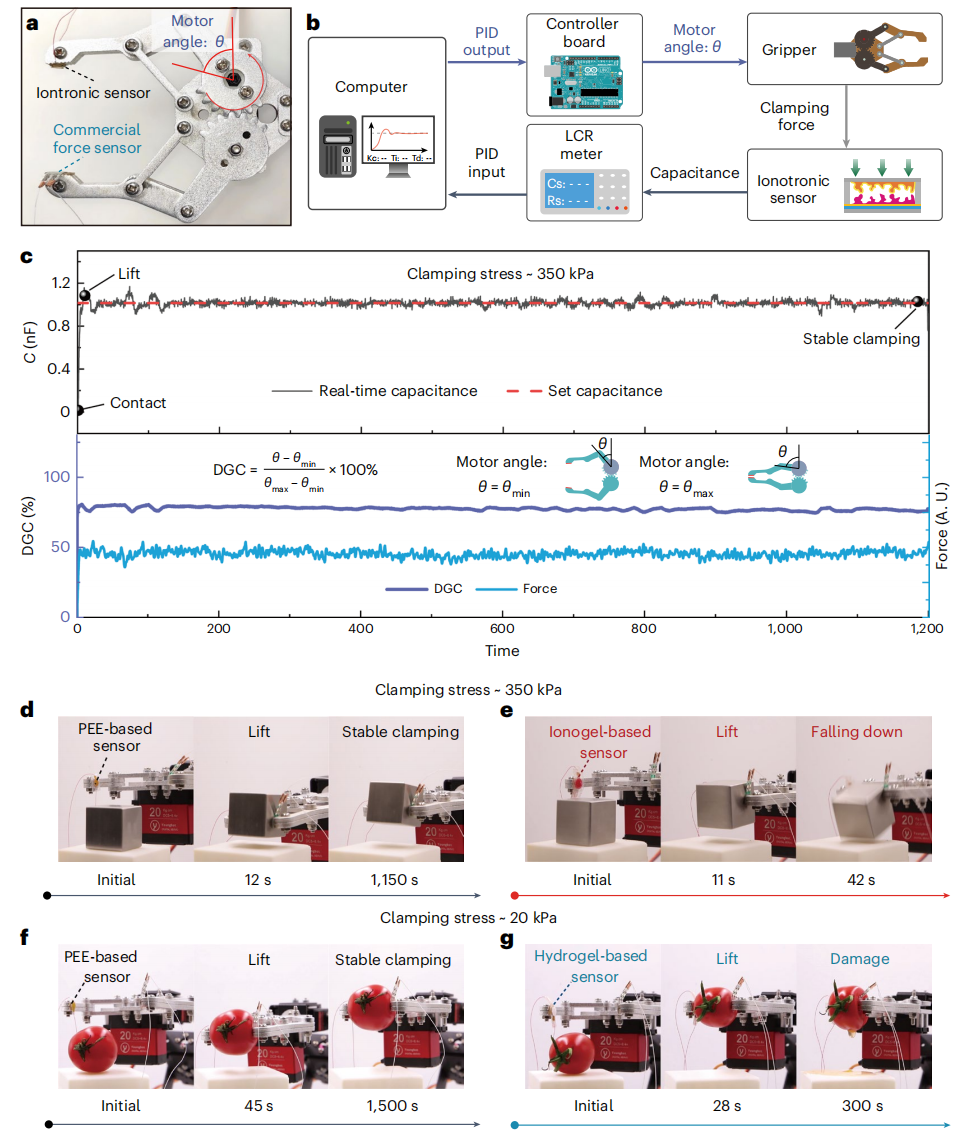
图5:无漂移柔性压力传感器在机械手抓握操作中的应用
最后,研究人员将传感器集成到一个机械抓手上展示了准确传感-控制-驱动的一体化系统。该机械抓手由一个电机驱动,并配备了一个用于力监测的商业传感器(图5a)。使用一个Arduino板来驱动电机以改变机械抓手的闭合程度(DGC),并利用传感器的信号作为输入采用PID程序来控制DGC(图5b)。该工作演示了集成有无信号漂移传感器机械抓手的精确控制。其可以在350 kPa的高夹紧压力下稳定地抓住钢块。当机械抓手开始工作时,接触夹持物后电容上升,一旦达到电容的设定值,DGC被固定,并向机械抓手发送命令以提升钢块。机械抓手可以稳定地夹住钢块20 min,在此期间DGC和夹持力都保持稳定(图5c,d)。
相比之下,将有漂移行为的基于离子凝胶的传感器集成到机械抓手上,在350 kPa的固定压力下PID程序会不断调整DGC,使电容接近设定值,导致钢块滑脱(图5e)。基于无信号漂移传感器对力的精确检测,机械抓手可以安全操作脆弱的物体,研究人员演示了在1500秒内稳定抓住一个小番茄(图5f)。相比之下,当使用基于水凝胶的传感器时,水凝胶脱水会导致电信号的降低而导致DGC增加,最终机械抓手捏坏了小番茄(图5g)。
可精准计量的柔性压力传感器具有大规模工程化应用价值,在智能穿戴、人形机器人等领域具有广阔的应用前景。
相关论文信息:
https://doi.org/10.1038/s41563-024-01848-6
审核编辑:刘清
-
压力传感器
+关注
关注
35文章
2258浏览量
163811 -
人形机器人
+关注
关注
3文章
553浏览量
16928 -
智能穿戴
+关注
关注
2文章
419浏览量
39841 -
柔性传感器
+关注
关注
1文章
88浏览量
4095
原文标题:无漂移柔性压力传感器,可应用于智能穿戴、人形机器人
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
汉威科技柔性触觉传感器:为人形机器人装上“中国触觉”

研发一种抗拉伸干扰的高灵敏度柔性压力传感织物

气体压力传感器的种类和特点 气体压力传感器在环保监测中的应用
微型拉压力传感器—中航电测机器人用系列传感器









 工商网监
工商网监
评论