 什么是CAN2.0协议?
什么是CAN2.0协议?
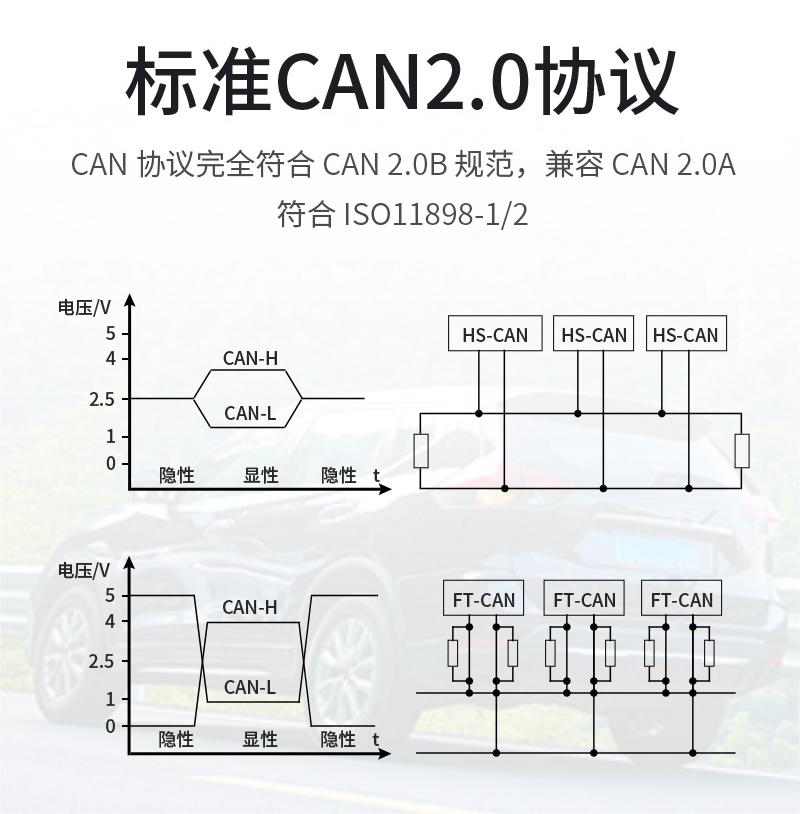
CAN2.0协议是控制器局域网络(Controller Area Network, CAN)的一种版本,也被称为传统CAN协议,由德国博世BOSCH公司开发,并已成为国际上广泛应用于汽车电子、工业自动化控制以及其他分布式控制系统中的现场总线标准之一。CAN协议在设计时注重实时性能、错误检测与恢复机制以及网络节点间的高效通信。
在CAN2.0规范中,主要有2种报文格式:
①CAN 2.0A
CAN2.0A支持标准帧格式(Standard Frame Format),这种格式的标识符长度为11位,适用于不需要大量节点或者复杂网络结构的应用场景。
②CAN 2.0B
除了支持标准帧格式之外,CAN2.0B还引入了扩展帧格式(Extended Frame Format),其标识符长度增加到29位,这极大地扩展了网络中可寻址节点的数量和数据的多样性,解决了CAN网络中可能存在的标识符资源不足的问题。
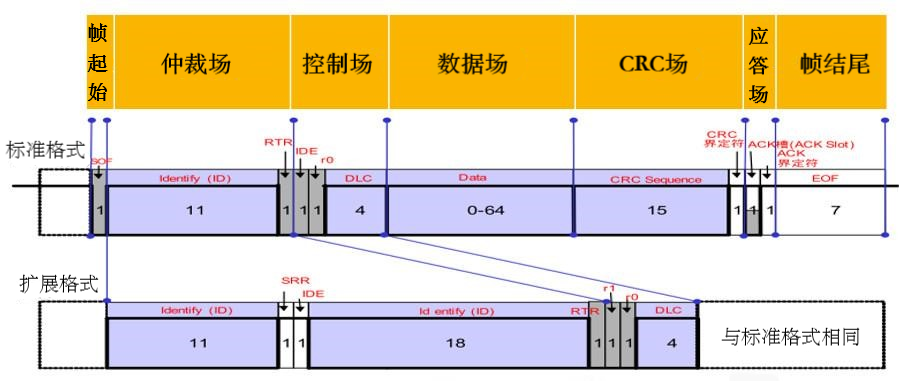
CAN 2.0标准数据帧结构
• 帧起始:标志数据帧和远程帧的起始,它仅由一个“显性”位构成。
• 仲裁场:由标识符(ID)和远程发送请求(RTR)位组成。标识符的长度为11位,这些位以ID-10至ID-0的顺序发送,最低位为ID-0,其中最高7位(ID-10 ~ID-4)必须不是全“隐性”。RTR位在数据帧中,必须是“显性”的;而在远程帧中,RTR位必须是“隐性”的。
• 控制场:由6位组成,包括两个用于将来扩展的保留位和4位数据长度码。
• 数据场:由数据帧中被发送的数据组成,它可包括0至8个字节,每个字节包括8位,其中首先发送最高有效位(MSB)。
• CRC场:包括CRC序列、CRC界定符。
• 应答场:2位长度,包括应答间隙和应答界定符。
• 帧结束:每个数据帧和远程帧均是由7个“隐性”位组成的标志序列界定的。
与标准数据帧相比,扩展数据帧的ID为29-bit,控制场的IDE-bit为1。两种帧格式的区别通过“控制场”中的“识别符扩展”位来实现。
CAN2.0协议的数据传输特性包括多主站通信、非破坏性仲裁、错误检测和通知机制等,这些特点确保了即使在网络负载重或出现故障的情况下,也能保持高可靠性和实时性通信。
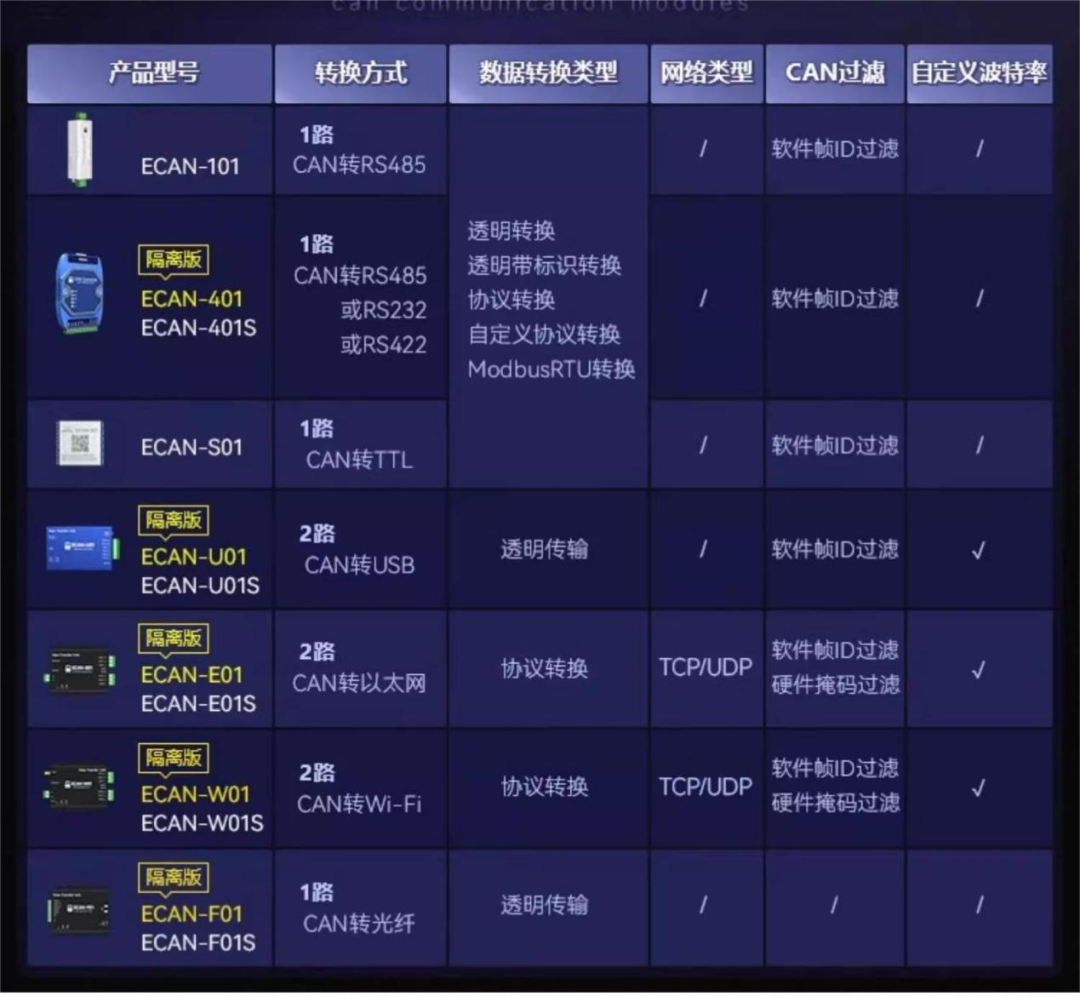
亿佰特自主研发的高性能CAN协议转换器/转换模块ECAN系列,可以实现CAN与串口RS232/RS485、TTL、USB、光纤、Wi-Fi等不同协议数据之间的双向转换。具有体积小巧、方便安装等特点,支持标准CAN2.0协议,在CAN-BUS类产品开发、数据分析应用中具有极高的性价比,是工程应用、项目调试及产品开发的可靠助手。
-
控制器
+关注
关注
113文章
16682浏览量
180807 -
汽车电子
+关注
关注
3031文章
8125浏览量
168597 -
CAN
+关注
关注
57文章
2806浏览量
465567
发布评论请先 登录
相关推荐
科普一下CAN总线的基础知识

飞凌嵌入式ElfBoard ELF 1板卡-开发板适配之FLEXCAN
嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-开发板适配之FLEXCAN
基于CAN总线的越野车车踏控制器研发 主控是SLH89F5162
飞思卡尔IMX6主板/工控板,视频解码能力超强
Freescale i.MX6主板/工控板,性价比极高
关于CAN2.0协议(AB)与CANBASIC报文的一些疑问
CAN支持CAN2.0协议中提到的自动重传功能,为什么找不到?
工业CAN2.0及CAN-FD隔离器及共模干扰抑制模组
步进驱动、控制一体式电动夹爪





 工商网监
工商网监
评论