 广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot
广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot
3月29日,为助力机器人厂商客户快速复现及验证斯坦福Mobile ALOHA机器人的相关算法,广和通发布具身智能机器人开发平台Fibot。作为首款国产Mobile ALOHA机器人的升级配置版本,开发平台采用全向轮底盘设计、可拆卸式训练臂结构,赋予机械臂更多的自由度及臂展范围,并实现了Andorid/Linux融合系统,方便客户进行软件及算法的开发及验证。
“具身智能未来是AI边缘侧部署的关键应用,将大大提高人类生活和工作的效率与质量”,广和通AIC产品管理部总经理张泫舜表示:“广和通具身智能机器人开发平台Fibot具备感知、视觉、定位及导航、动作控制等底层能力,能更好地赋能客户实现AI与机器人相结合。随着AI技术的突破性进展,具身智能的演进将成为科技变革的新高地与经济发展的加速器。”
广和通具身智能机器人开发平台Fibot满足客户验证Mobile ALOHA协同学习与简单的示教操作数据需求,从而习得机械臂的高级移动操作功能算法。同时,开发平台还能通过底盘选配的激光雷达或双目模组,实现室内外的空间感知及建图、路径规划和动态避障等算法的二次开发。此开发平台还集成了多种深度学习和强化学习AI算法,结合高效的感知系统与智能决策框架,极大提升了客户进行二次开发的效率。
值得一提的是,Fibot以广和通高算力智能模组SC171作为主控。SC171基于高通QCM6490物联网解决方案设计,QCM6490采用8核高性能处理器,具备高达12TOPS算力,可对数据进行高效计算与处理;集成多种AI算法,助力终端实现边缘计算和AI特性。
高通公司产品市场总监李骏捷表示:“高通与广和通在AIoT领域保持着长期紧密的合作,此次利用高通先进的高性能低功耗物联网解决方案,支持广和通打造全新的具身智能机器人开发平台,彰显了双方积极践行推动终端侧AI与边缘计算普及的共同承诺。我们期待携手广和通及更多生态伙伴,共同把握AI浪潮下的产业新机遇,让智能计算无处不在。”
结构上,具身智能机器人开发平台Fibot采用了创新性的全向轮底盘设计,使其具有狭窄空间的原地旋转或平移运动的能力;可拆卸式训练臂的结构设计方便客户完成算法开发后进行实测与部署。此外该平台相比原斯坦福Mobile ALOHA方案,赋予了机械臂更多的自由度及臂展范围,并对机械臂额定负载能力进行了超150%的优化,提升了开发平台在复杂场景或任务的适应能力。
得益于以上卓越性能,广和通具身智能机器人开发平台Fibot可助力机器人厂商进行软件及算法的二次开发,赋能具身机器人广泛应用于工业制造、家用服务、智慧物流等场景。随着AI开发生态不断发展,该开发平台将为更多机器人终端带来可商用的软硬件基础。
具身智能机器人开发平台Fibot的面世展现了广和通在机器人领域技术与产品研发的丰富成果,同时也是广和通在5G和AI领域深耕的集中体现。随着芯片算力的提升和软硬件的持续优化,广和通将为机器人行业提供更多的AI解决方案,携手产业伙伴共趋人工智能的下一个浪潮。
审核编辑:刘清
-
加速器
+关注
关注
2文章
796浏览量
37835 -
Linux系统
+关注
关注
4文章
593浏览量
27387 -
智能机器人
+关注
关注
17文章
868浏览量
82261 -
AI算法
+关注
关注
0文章
248浏览量
12258 -
广和通
+关注
关注
3文章
721浏览量
12949
原文标题:广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot
文章出处:【微信号:Fibocom,微信公众号:广和通FIBOCOM】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
广和通荣登36氪具身智能创新应用案例及《2024年具身智能产业发展研究报告》

广和通荣登36氪具身智能创新应用案例及2024年具身智能产业发展研究报告

广和通具身智能机器人开发平台Fibot入选中国信通院“人工智能+电信业”赋智先锋案例

广和通具身智能机器人开发平台Fibot入选中国信通院“人工智能+电信业”赋智先锋案例

广和通Fibot平台入选“人工智能+电信业”赋智先锋案例
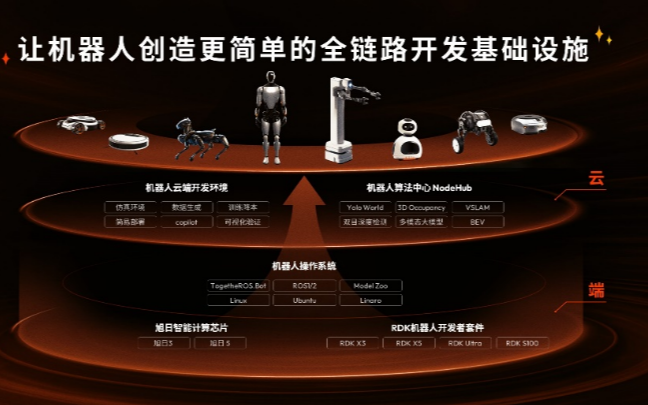
100T极致算力+全链路开发支持,地瓜机器人为具身智能造“基座”

广和通发布基于高通高算力芯片的具身智能机器人开发平台Fibot







 工商网监
工商网监
评论