 人形机器人领域六维力传感器市场规模将达138.40亿元
人形机器人领域六维力传感器市场规模将达138.40亿元
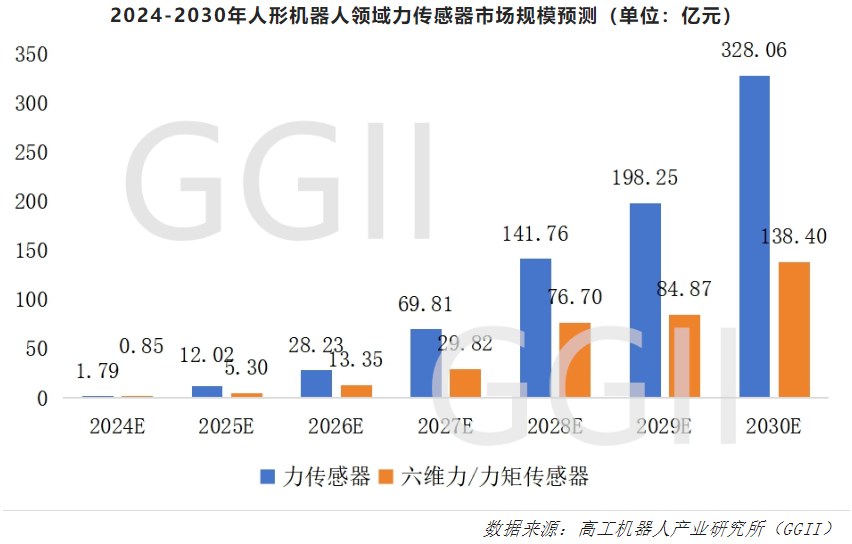
随着人形机器人量产及商业化进程的推进,高工机器人产业研究所(GGII)预测,到2030年,全球人形机器人领域力传感器市场规模将达328.06亿元,其中人形机器人领域六维力传感器市场规模将达138.40亿元。
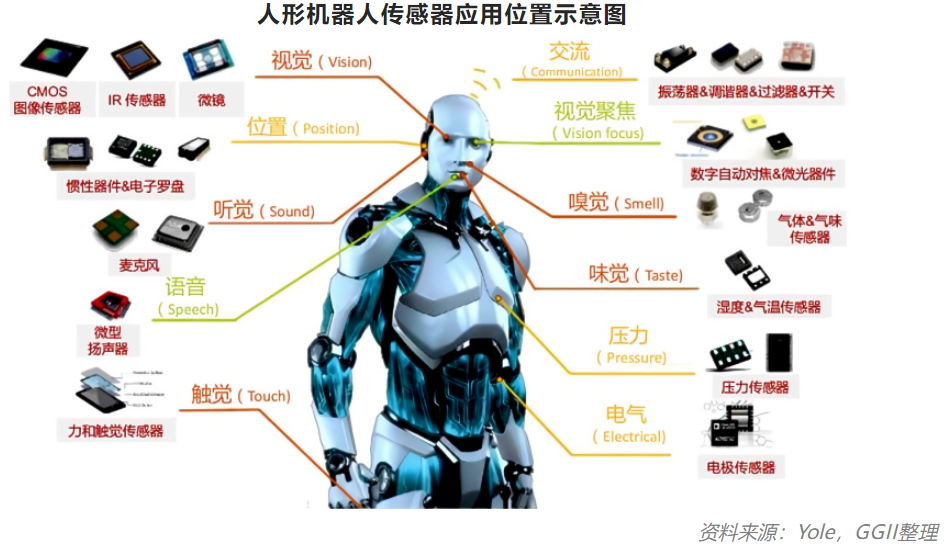
感知是人形机器人控制和执行的前提。感知层的传感器是软件控制和硬件零部件的桥梁,是物理世界与数字世界的接口,是实现具身智能的关键。
力传感器作为其中一类,负责将力的量值转换为相关电信号,可以检测张力、压力、重量、扭矩、应变和内应力等机械量。人形机器人常用的是维度最高的力矩传感器——六维力传感器(也称:六维力矩传感器)。
六维力传感器能够给出最为全面的力觉信息,同时,其在全方位机械过载保护、动态性能等领域技术壁垒也较高。
通过六维力传感器来感知与工件之间的相互作用力,并将感知到的力信号反馈给控制系统,控制系统继而根据感知到的力信号调整人形机器人的运动轨迹和力度,从而实现对力度的精确控制。
而事实上,究竟什么技术路线的六维力传感器更适合人形机器人,业界仍在持续探索。
“谁”更合适?
技术路线探索
根据传感元件的不同,六维力传感器主要分为应变片式、光学式、压电、电容式、MEMS硅原理等各种原理。
市场中技术成熟且应用较广的是应变片式。应变片式通常采用的是硅应变片或金属箔,本质是材料本身发生形变,进而转化为阻值变化,具有精度高、测量范围广、成本低、高频响特性好等特点。
那么,应变片式是最适合人形机器人的六维力传感器吗?
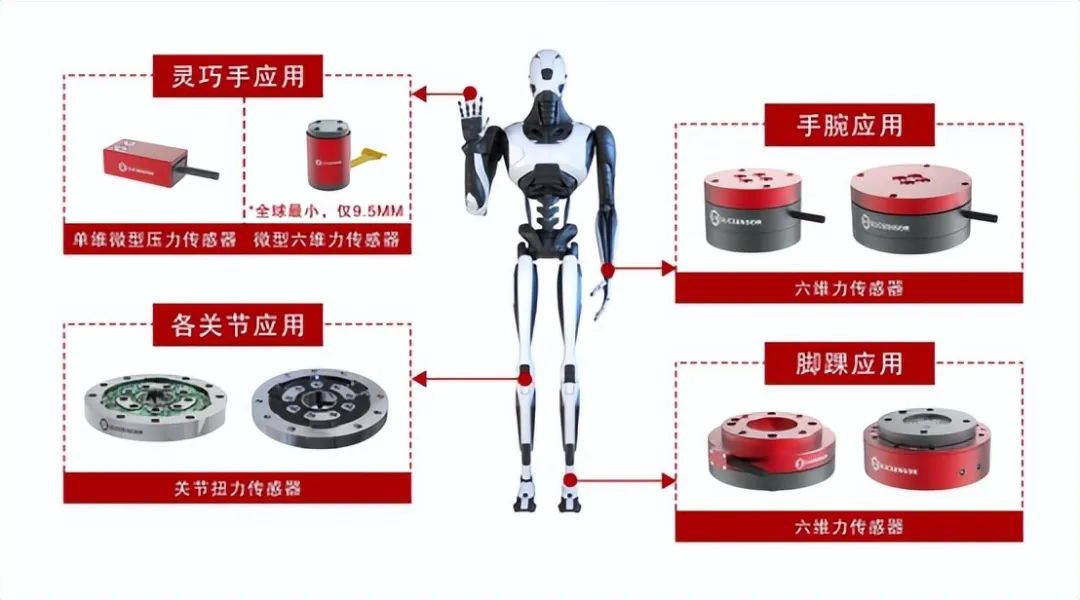
“应变片式六维力传感器可以满足人形机器人手腕的应用需求,但对于脚踝而言,显得有些力不胜任,并不是最合适的技术路线。”鑫精诚传感器董事长吴浩在接受高工机器人调研时表示。
应变片式所存在的问题主要表现为长期可靠性不足。由于应变片式是胶水粘贴的工艺,采用该技术路线的六维力传感器避免不了存在胶水氧化老化后的零点漂移,温度漂移、蠕变等问题。吴浩表示,从原理上来看这基本上是无解的。但对于人形机器人的脚踝而言,六维力传感器的长期可靠性是不能作让步的核心性能。
除此之外,高刚性和抗过载能力也是考核六维力传感器是否能够满足人形机器人的核心性能。
人类的踝关节为重要承重关节,数据显示,步行时足部承重是体重的1.5倍。就像人的踝关节一样,人形机器人的脚踝同样需要承受超出其自身的重量。以特斯拉展示的第二代人形机器人Optimus为例,该人形机器人的身高为1.8米,重量为57KG,相对应其脚踝所需要承受的重量或将超过57KG。
如上文所言,同时需要兼具高刚性、强大的抗过载能力和温度灵敏度漂移控制能力,以及长期可靠性,那么究竟什么技术路线的六维力传感器会比应变片式更适合人形机器人应用呢?
围绕这个问题,鑫精诚传感器展开了多技术路线的研发探索,并已有收获,于近期推出了两大系列不同方向的六维力传感器产品,分别是压电六维力传感器和MEMS原理关节力矩传感器。
压电六维力传感器
更贴合人形机器人脚踝应用要求
压电式技术路线的特点是:高刚性、高灵敏度、无零点漂移、不受温度变化影响,理论上无限次使用寿命。压电式无需外加电源,也不需要胶水粘贴工艺,不存在应变片式的胶水氧化老化等问题。
由于压电式六维力传感器技术难度高,目前市场应用仍以瑞士Kistler等国外品牌为主。反观国内,多数企业尚未布局,或正处于研发、验证等阶段。如今,鑫精诚传感器已攻破这项技术,实现了压电式六维力传感器的自研自产。
鑫精诚传感器所研发的压电六维力传感器采用压电石英晶体原理,是一款已预压的六维力传感器,可用于测量三个正交方向的力(Fx,Fy,Fz)和力矩(Mx,My,Mz),所有的方向的力和力矩信号由单独的压电晶体感应并输出。
鑫精诚传感器推出的压电六维力传感器具备高刚性、高稳定性、低温漂、低零飘、长期可靠性好、抗过载能力强(≤120%)、工作温度范围广、使用寿命长、固有频率高、上下双法兰连接、极低的阈值、使用寿命过亿次、IP等级高等优势,更加贴合人形机器人脚踝处的应用需求。
具体来看,该产品的温度灵敏度漂移(≤0.05%F.S/℃)较应变片式表现更好,且工作温度范围较广(-40-120℃),尤其能够满足通用型人形机器人应用。此外在产品设计上,鑫精诚传感器的压电六维力传感器结构紧凑,即便在非常狭小的空间内,也可以完成力/力矩的动态或准静态测量。
关于它的刚性和灵敏度,吴浩举例表示:“压电六维力传感器可以非常好的兼顾刚性和灵敏度,它既能准确测量卡车的重量,又同时能分辨出驾驶员吐出的口香糖的重量。”
对动态力测试应用,石英压电测力传感器具有很多优点和独特的特性,成为动态力测量的最好的选择。但是它的保压性能不好,在静态力测量方面的能力略显不足。
石英压电测力传感器产生的测量信号将随时间衰减,不适合做长周期、静态测量,因此不能用于静力测量的应变式称重传感器做互换。举一个通俗的例子:放十个砝码时压电传感器当即可以测量,但是静置一段时间后就测不出来了。除此之外,压电式力传感器的精度表现并不如应变片式高。
“但这两个方面的不足并不影响它在人形机器人中的应用效果。从理论上来说,人形机器人不停地在运动,测的是动态力。另外,人形机器人对六维力传感器的要求主要是重复性和长期稳定性,而并非要有多高的精度。”吴浩表示。
MEMS原理关节力矩传感器
适用于协作机器人和人形机器人
除压电六维力传感器之外,鑫精诚传感器还围绕MEMS硅原理开发了适用于协作机器人和人形机器人的MEMS原理关节力矩传感器。
据悉,鑫精诚传感器研发的MEMS原理关节力矩传感器具有高刚性、抗冲击能力强、零点漂移小、抗弯矩能力强、正反向对称性好、受径向力影响、物理带宽高1000HZ 以上、全温度范围补偿、灵敏度更高等特点。
综合来看,该力矩传感器可以适应机器人的碰撞、跳跃等冲击,不会损坏传感器,不会产生零点漂移,可以实现自动化生产,产品质量、可靠性、一致性更可靠。
“让客户更放心、更安心、更安全,MEMS原理关节力矩传感器具有极致性价比,有利于人形机器人行业早日量产。”吴浩表示。此外,其拥有独有的交叉载荷影响自补偿技术,使得交叉载荷的对扭矩的信号影响小。
该MEMS原理关节力矩传感器同样无需胶水粘贴,采用硅微熔技术。且它与压电六维力传感器一样,在过载能力、温度灵敏度漂移、长期可靠性、刚性、一致性等方面均表现突出。
吴浩更是直言,采用该技术路线的MEMS原理关节力矩传感器在多项性能上都比应变片式好10倍,尤其灵敏度是应变片式的20倍。
协作机器人通常采用的六维力传感器方案有两种:一种是安装在协作臂末端;另外一种是安装在每个关节处。每个关节处需要用到1个关节扭矩传感器,1台协作机器人则总共需要6个或7个,取决于关节数量。
而对于人形机器人而言,其所需的MEMS原理关节力矩传感器数量则取决于本体自身的设计方案。以特斯拉展示的第二代人形机器人Optimus为例,其共有40个关节,每个关节安装一个力矩传感器,总共需要40个MEMS原理关节力矩传感器。
从生产角度来看,据吴浩介绍,该技术路线的MEMS原理关节力矩传感器对自动化生产的要求高,因此前期需要投入的设备及产线成本较高。但从另一个角度来看,当量起来了,进入规模化生产后,该产品的成本反而会比应变片式更低。
“新品MEMS原理力矩传感器即将发布。经过严格测试和优化,这款革命性的新型传感器使用MEMS原理为基础,创新性地改进了力矩测量方案,从而实现了高精度和高效率。在我们努力创新的同时,我们保持对质量的承诺,提供最适合客户需求的产品。”吴浩说道。
远望“人形”等风来,脚踏实地干实事
在人形机器人领域,鑫精诚传感器早已有所布局,不仅有对应的产品开发,而且已经给行业头部的多家人形机器人企业打样合作中。值得一提的是,鑫精诚传感器已实现全自动化生产,可做到保证品质的批量交付。
图片来源:鑫精诚传感器
但吴浩表示,人形机器人只是公司未来5-10年甚至更加长远的增长点,近三年内的主要增长点将主要来自工业机器人和协作机器人领域,以及焊接和精密装配领域。
其中在协作机器人方面,2023年鑫精诚传感器已陆续给大族机器人、遨博智能、法奥意威、长广溪智能、越疆机器人等头部厂商打样。其主要配合协作机器人,针对焊接环节进行拖拽示教,完成焊接轨迹规划。
在产品研发方面,鑫精诚传感器一直以来都坚持“多技术路线”创新开发。吴浩表示,公司的研发团队年轻且学习能力强,以压电六维力传感器为例,从研发到落地仅花了6个月。
当前,鑫精诚传感器的六维力传感器产品直径跨度覆盖9.5mm-300mm,力量程跨度从5N到50KN,力矩量程跨度从0.1N.m到1000N.m,可覆盖大部分应用领域。其产品结构包括中空式,法兰式,IP68防水、微型式、自带紧固螺钉式等,几乎覆盖了常规六维力传感器的所有结构。
未来,鑫精诚传感器将继续专注力学原理传感器的开发,攻克高精度、小体积、低成本、集成化、智能型的高端力学传感器。
2024年4月18日,鑫精诚传感器将参加由高工移动机器人、高工机器人产业研究所(GGII)举办的2024中国人形机器人技术应用峰会,并作为参编单位在现场共同见证《人形机器人产业发展蓝皮书》的首发仪式。
审核编辑:刘清
-
过载保护
+关注
关注
1文章
128浏览量
12564 -
力传感器
+关注
关注
0文章
148浏览量
15255 -
电信号
+关注
关注
1文章
840浏览量
20651 -
人形机器人
+关注
关注
3文章
495浏览量
16759
原文标题:掘金超百亿级市场,力传感器行业“翘楚”的前瞻探索
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
A股上市公司凯尔达宣布控股六维力传感器企业 布局人形机器人关键核心部件
成立15年,鑫精诚这家深圳传感器公司获亿元天使融资(六维力传感器这条赛道真火)

高盛上调人形机器人市场规模预测
120万亿机器人市场带火国产传感器,哪些有望率先打破垄断?(全面分析)
6L2A六维力传感器为机器人提供全方位解决方案

今年中国人形机器人市场规模将达27.6亿元
无人叉车的市场规模怎么样?适合使用agv的企业有哪些共同点?

FUTEK传感器在人形机器人中的应用
2026年:人形机器人产业规模预计超200亿元大关



OpenAI入局人形机器人 Figure AI公司获得6.75亿美元融资
人形机器人:3大核心传感器技术壁垒及市场规模分析(1.3万字)






 工商网监
工商网监
评论