 毕超博士:基于RISC-V的机器人电机控制芯片
毕超博士:基于RISC-V的机器人电机控制芯片
全文转载自媒体
3月29日,在IIC Shanghai 2024国际集成电路展览会暨研讨会同期举办的“2024年中国IC领袖峰会”上,峰岹科技(深圳)股份有限公司首席技术官毕超博士发表了“基于RISC-V的机器人电机控制芯片”主题演讲。

峰岹科技首席技术官毕超博士
很多人希望了解,电机控制和机器人控制到底有什么区别?它们的内在联系是什么?特别是现在人形机器人很火。其实中间一个非常关键的技术,就是它电机控制是什么样的?它对芯片产生了什么样的挑战?毕超博士在会上和大家分享了该公司做的考虑、布局以及一些所取得的结果。
“机器人控制系统”和“电机控制系统”到底是什么关系?据介绍,所谓电机控制系统在机器人里面,接到运动的指令后让机器人的具体关节产生指令所要求的运动的这一块叫伺服电机控制系统,是机器人子系统。让机器人进行什么样的运动牵扯到机械方面、力学方面、计算机方面的知识,机器人的主控制系统根据整体机器人系统状况的分析相每个关节发出要求的运动指令。
机器人控制系统接到使用者运动的要求后,要进行和解析,产生运动指令,并且把指令传给各个关节,就是控制自由度的电机。电机控制器根据所收到的指令以预定的控制模式让电机产生所需要的运动。例如速度是多少?转向是多少?位置是什么?等等。“我按照你的命令产生所需要的运动,所以是服从的单位”。
但是,对电机控制系统而言,技术上的难点是,接到命令以后如何快、准、好地完成指令,这就牵扯到许多的算法。怎么样快?还有芯片技术、电机技术,以及行业里面所谓电机控制的architecture。怎么样去做这件事?这就是“峰岹科技”所做的事情。
人形机器人这个概念的定义不是很清晰。很多场合叫足立机器人,它的运动不是轮子而是脚步运动。这个机器人有点像人形或者是其他支持感知和运动的智能机械架构,学术上叫具身机器人。
为了让大家比较容易接受,这里暂且叫它人形机器人。人形机器人有一个特点,自由度特别多。机器手要运动得真正像一个手需要27个DOF,就是27个关节,每一个关节都是电机。现在大家比较关注的一款机器人,一个手有11个自由度,两个手就是22个自由度。不要忘了我们还有腰部要运动,腿部也要运动,脚趾一般处理比较简单,都是一个板。但如果机器人要做到发达,脚趾也一定要考虑,这样才更加稳定,灵活性更好。

根据市场上公开的信息,该机器人总的自由度不低于30个,也有人认为是40个。不管怎么样,自由度都很多。一个机器人体中有很多电机在运行,需要控制,怎么样对这些电机实现高、精、准的控制?现在有一些客户已经在进行50多个自由度的机器人的调试。网上也能看到有63个DOF的机器人问世了。因此,对于机器人来说,伺服电机控制系统非常重要。
我们如何根据伺服指令做出快速准确的反应?以手的运动为例,要做到协调性非常好,非常有挑战性。
还有一些特别的要求,比如转矩密度要求比较高。有人可能听到机器人运转会发出一些奇怪的声音,实际上这是因为它里面除了电机运动,通常还要加一个微型齿轮。在同样功率下,电机速度越高,电机的体积越小。这个概念用在别的地方也合适。现在很多电动汽车公司在比,电机转速越来越高。意义在哪?在同样的功率下,电机体积比较小,同样的空间下就可以放更多的东西。
但是,我们的手不需要这样复杂快速的运动。很多情况下手的力量很大,但是运动速度并不快,通常加一个齿轮箱,这样一结合,就能够减小整个电机系统的体积,并且放大了转矩。其实齿轮箱上有很多因素也电机控制必须要考虑的。
机器人的整个运动中间需要高精度的传感器。要理解传感器的信号,这就和IC有关系。另外,关于无感控制现在也是热门的话题,现在很多机器人的电机系统上,要放传感器,价格就是个问题,空间也是个问题,可靠性也是个问题。能不能利用电机本体的电信号来检测它的转矩、位置和健康状态等指标,这就给电机控制芯片带来很大的挑战。
一般而言,机器人对电机控制芯片的要求有:
1、高性能。可以快速准确地完成转矩的控制。
2、高稳定性。为什么要搞人形机器人?就是让它做我们不大喜欢做或者不大适合做的一些比较危险的、重复性的工作。这个事情比较麻烦的是,它可能要在一些很恶劣的环境下工作。在这样的情况下如何保证电机的稳定性不出问题?所以,它对芯片本体的稳定性要求非常高。这件事情看起来容易,但实际上也要考虑在高电压、大电流下的工作,就是件非常麻烦的事情。
3、低功耗。芯片本体要求功耗比较小,发热就会好一些。还有,它产生的控制模式要求电机的效率比较高,这不光是芯片本身的问题,还有电机控制架构的问题。低功耗可以延长电机的工作时间和减少系统发热,这些对机器人特别重要。
4、多功能。高转速、频繁的正反转,机器人也有这样的要求,还需要有高爆发力。
5、安全性。要求芯片能够提供保护。因为芯片的反应还是快的,特别是电保护,能够实现多重保护,保证电机系统的安全。
6、高集成。因为现在整个机器人的控制用到了很多的电子器件,有没有可能把一些器件(比如传感器)结合在一起?目前已经有部分做到了。另外,像功率半导体能不能放在里面,这和一般的信号处理芯片又不一样。MCU当然也是重要的。
7、可编程性。者对于拓展机器人的应用访问很重要。
8、尺寸小。手部这样的东西本身没有多少空间,控制系统做得很大当然不合适。
9、高性价比。手上运动很复杂。现在许多机器人手上用的电机是空心杯电机,直径是可能只有6mm,是由美国和德国公司提供的。国内市场价格甚至达到1万块人民币一个。“如此高的价格。再带上控制芯片和带上传感器,2只手就是22个,这个机器人的价格你能接受吗?对控制器的一个重要要求是,成本一定要控制的好。”
二、基于RISC-V架构的伺服控制芯片
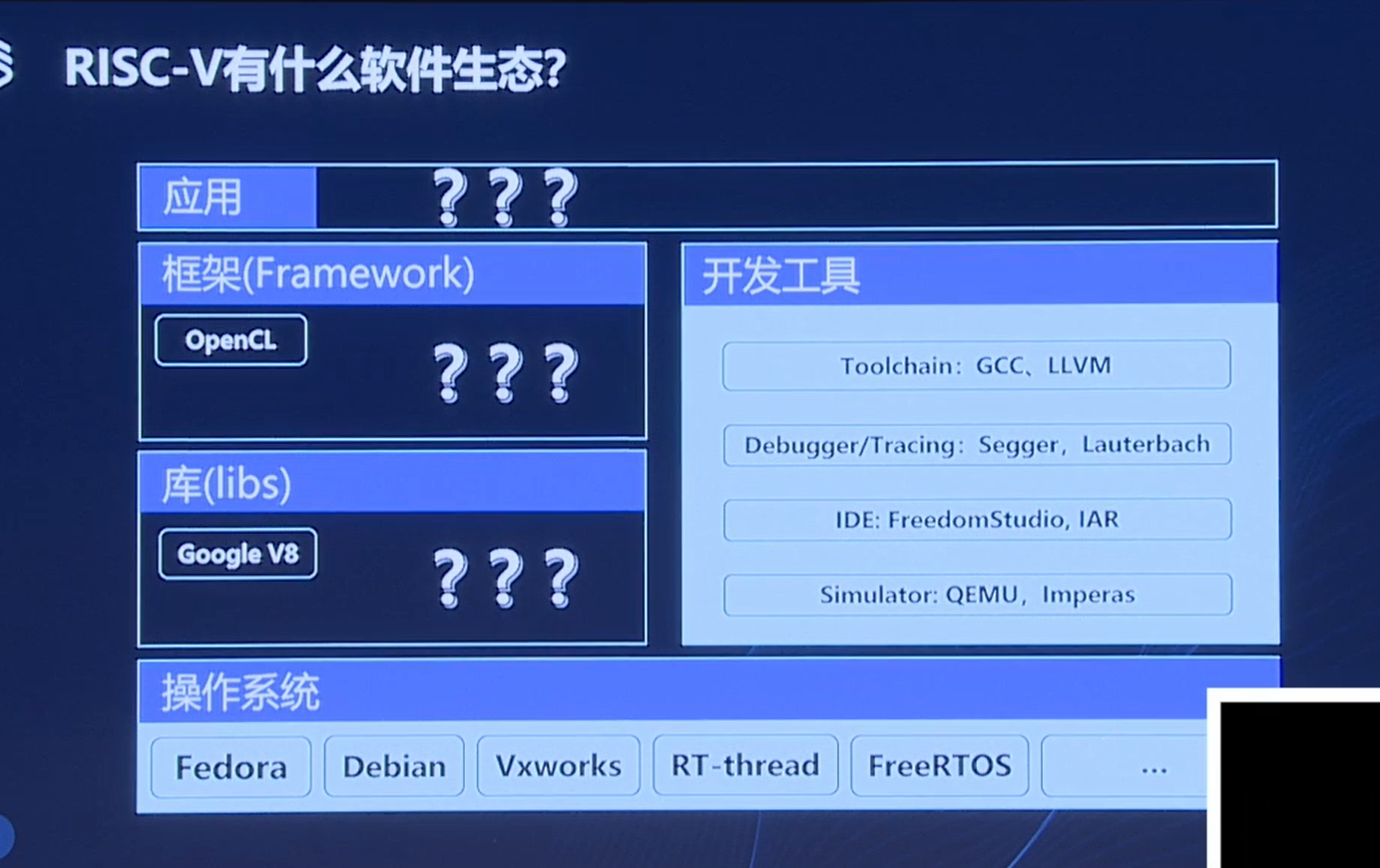
毕超博士认为,利用RISC-V做控制芯片是有很多好处的。首先,用它进行设计很灵活,设计高性能的芯片,设计效率提高很多。
其次,RISC-V本身具有精简的指令、高效的执行方式。“因为我们的算法越来越复杂,怎么样能够实现快速、准确、高效的电机控制模式?我们公司用RISC-V架构设计电机控制芯片,感觉它是非常好的架构。”毕超博士说。
RISC-V上在实现低功耗的芯片上面也有优势。如前所述,电机控制芯片上的要求非常高,在这方面,RISC-V在ASIC芯片上也用得很成功。现在很多像ASSP的芯片已经显示出非常大的优越性。考虑到机器人用的电机控制系统非常复杂,RISC-V的优势更加能得到体现。
三、多核架构:伺服控制芯片的有效解决方案
虽然多核架构现在并不罕见,但在电机驱动方面,峰岹科技还是走在比较前面。意义在哪呢?高密度芯片的制程有些风险。也就是说,如何用对制程要求不高的芯片来实现高性能的控制?多核是一条路。电机控制要求越来越复杂,功能越来越多,性能越来越强,用传统的芯片制程来设计芯片,非常困难。多核的架构能使得电机芯片能够以比较低制程的成本实现高性能的控制。
峰岹科技目前不考虑40nm以下的工艺,太贵,客户接受不了。
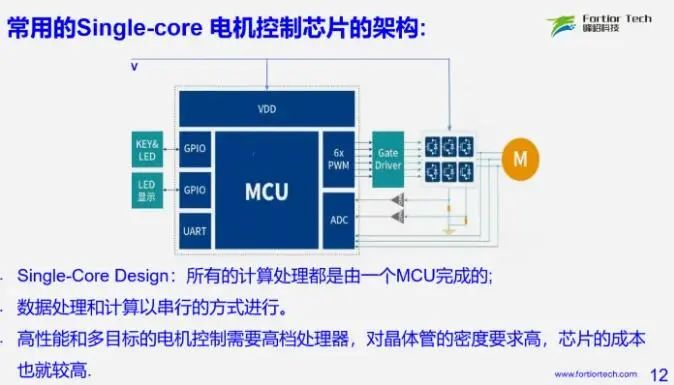
怎么样去做这样的芯片呢?传统的单核电机控制芯片,所有的运算和要执行的功能都是在一个核中完成的,即使在处理多个任务时也只能串行处理。因为电机转速越来越高,功能越来越多,所以靠单核的芯片,很多友商用28nm以下的工艺在做,这是可以理解的。但以目前对电机控制芯片的要求,你不用14nm做,不用高制程就没法做出来。这对许多中国内地的芯片公司就很困难,风险非常大。
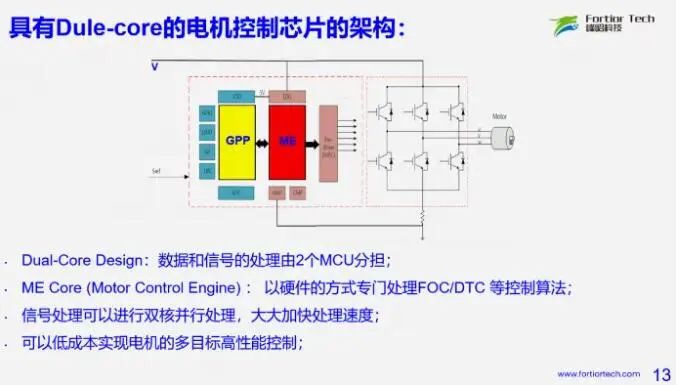
“我们和很多公司一样就考虑用双核结构。怎么做呢?就是有两个MCU内核分担工作,一个内核专门应对电机控制模式。电机转速很高,比如戴森的吸尘器电机已经到了15万rpm。峰岹科技里处理20万rpm的电机是经常的事。用一个专门的内核处理电机的控制模式,因为它的算法还是比较固定的。另外一个通用内核则用于实现通信的处理、保护和参数辨识等通用功能。信号处理可以进行双核并行处理,速度大大加快。
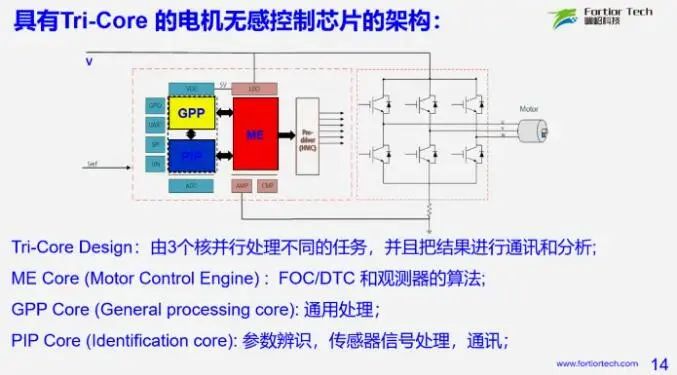
从目前的趋势看,即使双核架构也可能很快就不能满足要求,因此峰岹科技也打算用三核来做。除了ME和GPP内核又加了一个,比如把参数辨识和健康状态的检测放在新的核内。毕超博士认为,多核是重要的方向。有很多研究机构甚至干脆用GPU做电机控制。尽管这样做成本是个大问题,但是谁知道呢?跟现在大模型人工智能的发展一样。我们公司比较现实,先用多核的架构来做”。
ME内核,简单来看,它目前能实现的FOC计算时间是4.5μs(用友商数据比较一下,用Cortex-M3做的话大概是20-30μs)。PWM最高频率为100kHz,这用单一芯片来做也是比较难实现的。
四、智能功率模块:机器人电机控制系统的方向
传统的智能功率模块(IPM)把预驱和功率器件放在一起。IPM本身发展得很快。“我们在传统的芯片中把MCU也放进去,甚至为了机器人用把传感器也全部往里面放。已经做成和传统的IPM结构差别比较大的芯片了,因为牵扯到功率上的问题。
现代化的IPM设计,因为机器人对空间要求特别高,对成本要求也特别高,非常重要的方向就是用IPM来实现电机控制系统。使用IPM可以使机器人整个运作、整个控制系统得到很大的简化。这是很多公司愿意考虑用我们公司产品的原因。”
“这种事情讲起来容易,做起来却面临很多的挑战,他要把MOS、diode、HVIC等很多的功率器件放在一起,这就要考虑各个器件的兼容性。
散热管理对于IPM更重要。每个器件都会产生热,功率器件发热很严重,怎样形成有效的散热机制和散热界面,确保模块的运作,可靠性是非常困难的一件事情。它在保护上的要求非常高,因为很多器件在里面彼此互相牵制。峰岹科技内部现在提出了各种各样的想法。它到底能不能实现?要跟很多公司配合,包括封装公司。特别是量产能不能实现量产,不然成本控制也是大问题,这也是很大的挑战。
最后还是成本,如何平衡性能和成本?“大家有时候想得很好,最后做出来成本很高又是一个问题,都是挑战”。
五、峰岹科技的伺服控制芯片及模块
峰岹科技基于RISC-V和双核设想设计的芯片,目前电流、带宽和适配性等都非常好,在很多主流产品上也得到使用。现在这个器件已经开始在用于机器人伺服控制系统。
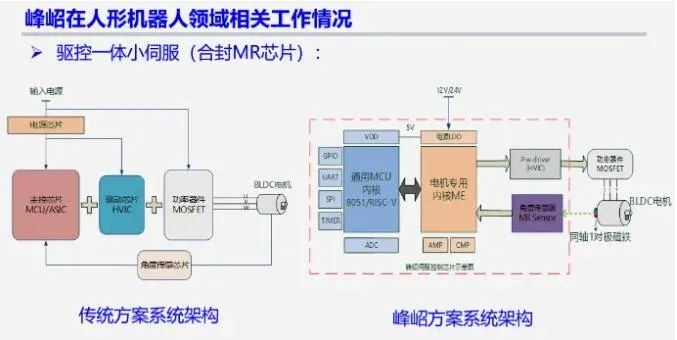
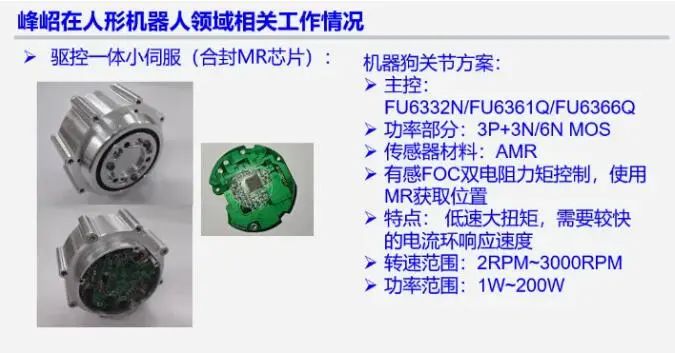
传统的方案采用分立器件实现,现在峰岹科技已经把传感器、通用内核和专用内核以及pre-driver都放在了一起。“没敢放的是功率部分,因为机器人类型和应用场景差别很大,所以我们的游戏产品干脆把它放外面,让大家灵活选不同电压、不同电流和不同功率。
机器狗关节方案是直接把控制系统放在电机上。峰岹科技也有模块,它的结构是双核的,把MOS管和预驱都往里放,这也是一种应用。要跟特定的公司合作形成这个产品。关于机器人主动轮的关节,人形机器人的手上运动,具身或者人形机器人,峰岹科技也都有具体的应用。
六、总结
对机器人,特别是人形机器人的电机控制来说,无论是传感器还是通信系统都越来越复杂,因此,对电机芯片的设计和制程都形成了严重的挑战。
另外就是尺寸限制,对尺寸要求越来越高。RISC-V架构使得设计非常灵活,能够跟得上市场的变化。多核架构也是减少成本的一个重要手段。
设计研发适用于机器人的高性能伺服用IPM芯片对于人形机器人非常有意义。
文:赵明灿 资深技术分析师
-
机器人
+关注
关注
211文章
28724浏览量
208779 -
电机控制
+关注
关注
3543文章
1899浏览量
269319 -
控制芯片
+关注
关注
2文章
516浏览量
39501 -
RISC-V
+关注
关注
45文章
2332浏览量
46704
发布评论请先 登录
相关推荐
risc-v多核芯片在AI方面的应用
risc-v芯片在电机领域的应用展望
关于RISC-V芯片的应用学习总结
表情机器人网络大赛
表情机器人网络大赛
为什么选择RISC-V?
RISC-V应用领域的拓展
4款玄铁RISC-V芯片亮相
RISC-V架构
FreeRTOS与RISC-V——适用于RISC-V的FreeRTOS概述
RISC-V核、平台和芯片该如何选择?
方之熙博士任命RISC-V基金会主席,热切关注加速中国RISC-V ISA应用
RISC-V有什么软件生态,RISC-V IP在芯片中的应用
控制技术是推动现代电机发展的重要动力 ——毕超博士出席浙江电机协会第9次会议






 工商网监
工商网监
评论