 超灵敏压力传感器:单点触滑双模传感新突破
超灵敏压力传感器:单点触滑双模传感新突破
超感官知觉这种说辞出现在不少的科幻影视作品中,各种天马行空的想象力促进了科技智能化的快速发展。在《阿丽塔,战斗天使》中的智能装备改造人阿丽塔不再是冰冷的机器,而是拥有更像人类的气息与触觉,通过更高密度的力量反馈以及材质感应器使阿丽塔手臂的触觉更加灵敏,使改造人能感知到他们所触摸的东西。科幻影视作品中极为震撼的场面,给我们提供了感官上的炫酷体验,并让我们为之神往。
回到我们脚下的大地,全球人类仍在智能传感器领域进行着各种科技探索。在智能机器人领域中,触觉传感器成为抓握的核心元件,其通过物理接触实现与周围环境的互动。近年来,传感技术从刚性逐渐向着柔性、高灵敏、多功能化的方向发展。与人体皮肤类似,智能触觉传感器应能够准确识别各种接触力,从而有效地控制目标物体为机器人提供类似人类的抓取能力。然而,由于高灵敏度及数据解耦要求,开发单点检测不同模式接触力的触觉传感器是非常困难的。因此,同时实现法向压力和滑动检测对触觉传感器的工艺、性能及数据分析技术均提出了重大挑战。
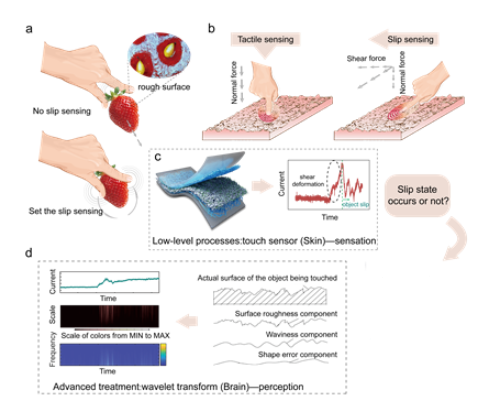
北京航空航天大学潘曹峰团队和北京纳米能源与系统研究所鲍容容团队及其博士生刘月等人通过相转化-牺牲模板法实现了触觉传感器的超高灵敏度,并通过对输出信号进行小波变换实现了复杂接触状态的单点多模态传感。实现单元像素点的多模态传感,有两个必要条件。首先,类似于神经信号采集,需要低级处理,有必要通过高灵敏传感器检测触觉信号的详细信息;其次,感知还需要大脑进行高级分析,其中涉及信息整合和特征提取,即需要后续的信号处理在时域和频域上对信号同时做出分析。
鉴于此,相转化-牺牲模板法只需要基本的实验仪器,灵敏层即可在10 s内一步成型。经验证,其适用于TPU、PS、PAN等多种材料,所制备膜的可控性和通用性可以根据膜的结构和性能期望应用进行调整。并且,构建了1167 kPa-1超高灵敏度的压力传感器,经验证,该触觉传感器可同时检测到成年女性颈动脉脉搏和呼吸频率的微弱波动。
基于信号精细采集,进一步结合小波变换对触/滑觉信号进行频域特征提取,通过高级处理实现对目标物体多模态的判断。经验证,该压力传感器可通过单元器件区分物体的静压状态及滑动瞬时刻,后期通过反馈系统集成,可使机器人根据物体质量的变化调整抓握力,从而实现可控抓握。
研究者相信,此项研究将会为传感器灵敏层的制备及信号分析方式打开一扇窗户,并为多模态触觉传感器的发展提供新的思路。该领域的迅速发展将赋予机器人视觉、力觉、触觉、嗅觉、味觉等对外部环境的多种感知能力,为人机交互提供更为自然和智能的体验。相关论文在线发表在Advanced Materials上,并于当期Inside Front Cover做简要介绍。
审核编辑:黄飞
-
机器人
+关注
关注
211文章
28390浏览量
206955 -
压力传感器
+关注
关注
35文章
2212浏览量
163393 -
触觉传感器
+关注
关注
4文章
85浏览量
9339
原文标题:未来抓握科技:超灵敏压力传感器实现单点触/滑觉双模传感
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
水压力传感器的特点和优势 水压力传感器的校准方法
气体压力传感器的种类和特点 气体压力传感器在环保监测中的应用
气体压力传感器与液体压力传感器的区别
压力传感器属于什么类别
常见的压力传感器有哪些
压力传感器芯片原理是什么
压力传感器芯片有哪些型号
压力传感器分类、原理及型号大全
压力传感器原理及应用介绍
如何选择压力传感器量程?如何选择压力传感器接头?

你了解压力传感器的压力技术吗?压力传感器有哪些使用注意事项?

压力传感器原理及应用 压力传感器怎么测试好坏
压力传感器型号及参数 压力传感器分类及用途
压力传感器原理及应用 压力传感器容易坏的原因
压力传感器的工作原理及应用






 工商网监
工商网监
评论