 请问KUKA机器人的Mada文件怎么配置呢?
请问KUKA机器人的Mada文件怎么配置呢?
进入正题
工具以及原料
ServogunTC41_Diakont_380V.afc&WorkVisual 6.0

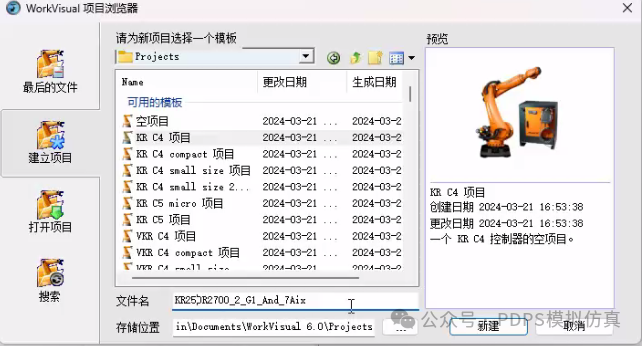
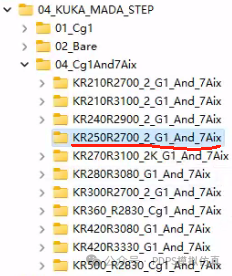
STEP1:打开WorkVisual6.0,新建一个空项目命名KR250R2700_2_G1_And_7Aix
STEP2:右击控制系统,选择对应控制器的版本号,确定,示例:8.3.14

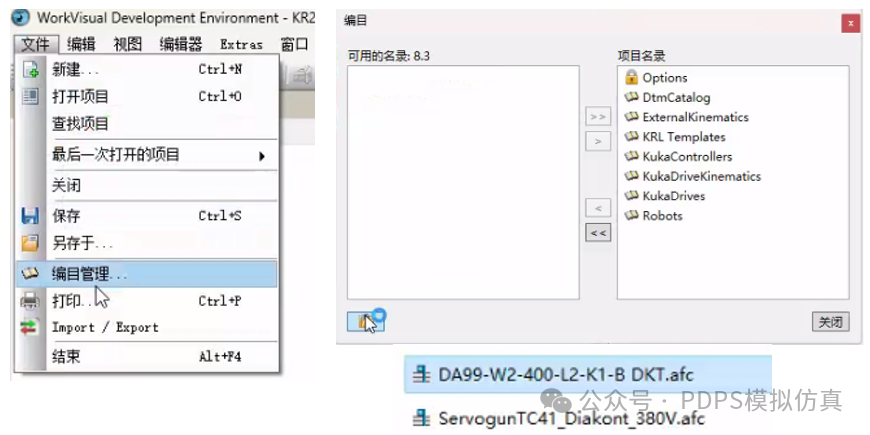
STEP3:文件-编目管理,添加焊枪.AFC文件,示例:PW焊枪
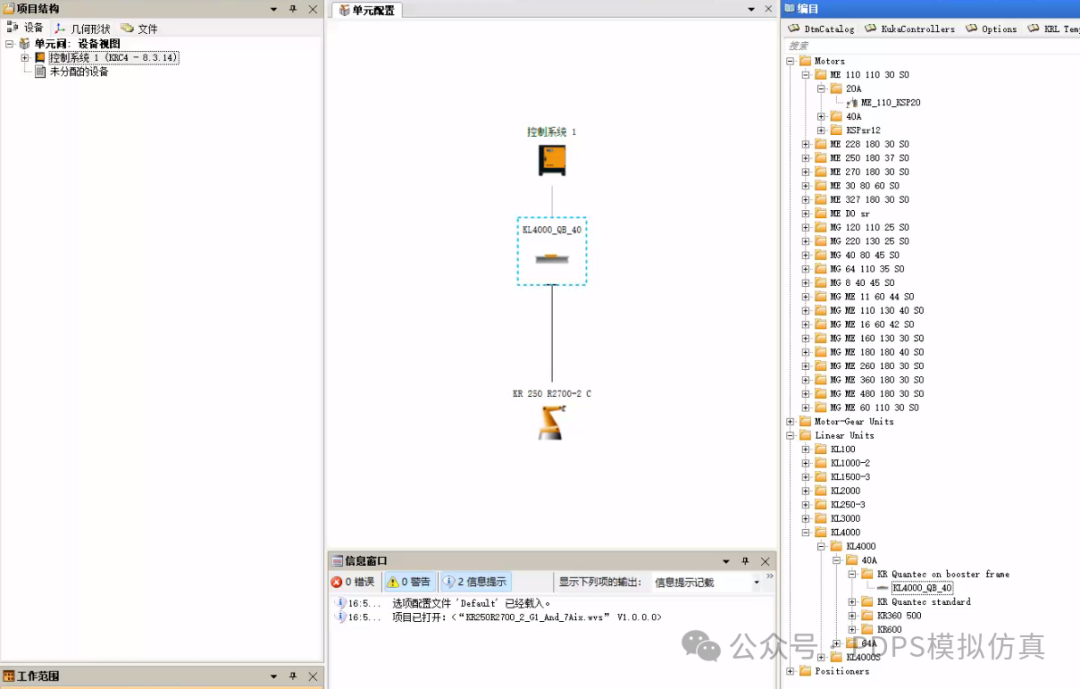
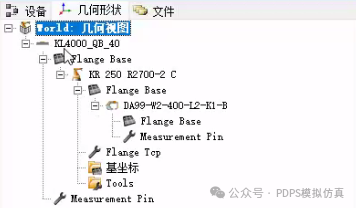
STEP4:编目窗口-Robots,选择对应机器人型号,鼠标拖到控制系统1栏中

STEP5:编目窗口-ExternalKinematics,选择7轴的型号,鼠标拖到控制系统1栏中,本项目用到的是KL400-QB-40
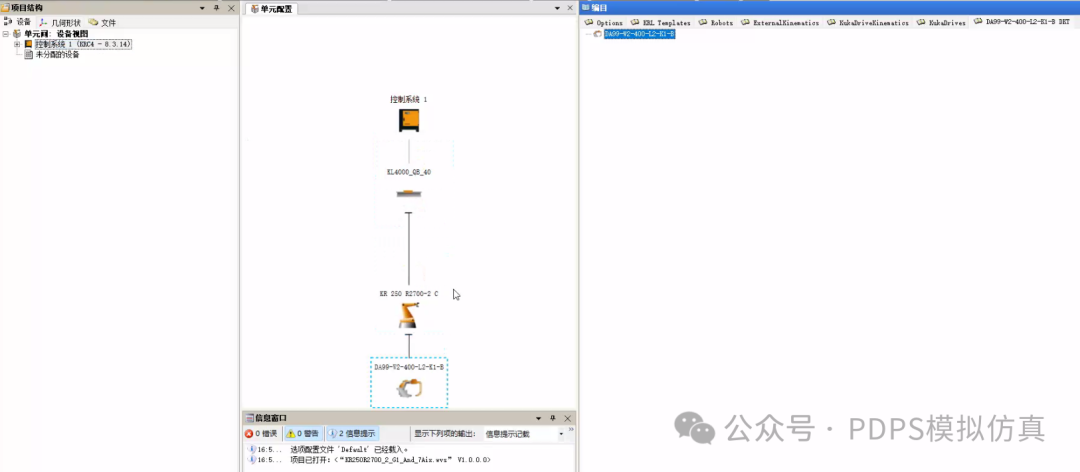
STEP6:编目窗口-DA99-W2-400-L2-K1-B DKT,选择DA99-W2-400-L2-K1-B,鼠标拖到控制系统1栏中
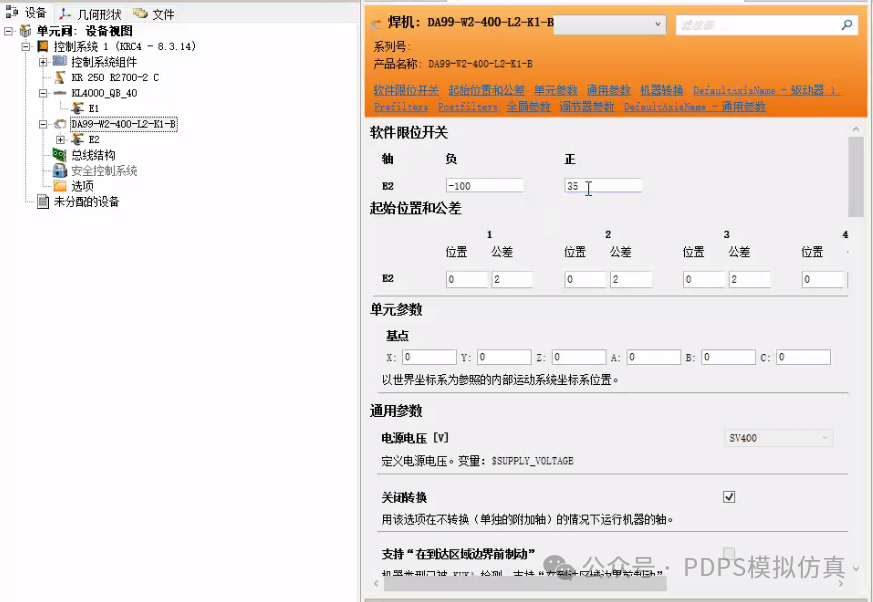
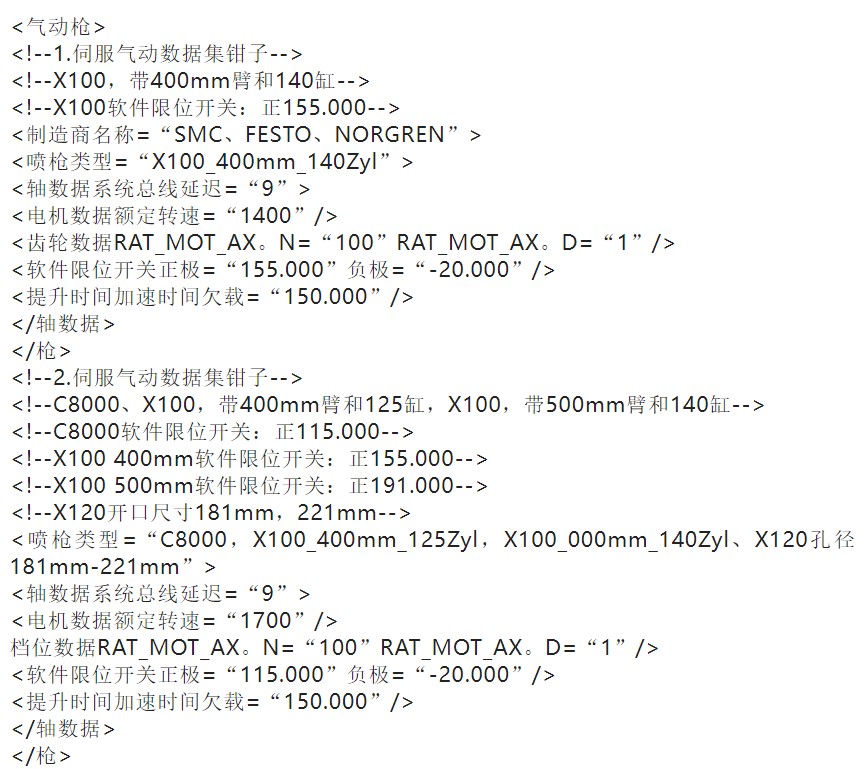
STEP7:配置焊枪的参数,极限位(焊枪开口范围)以及传动比
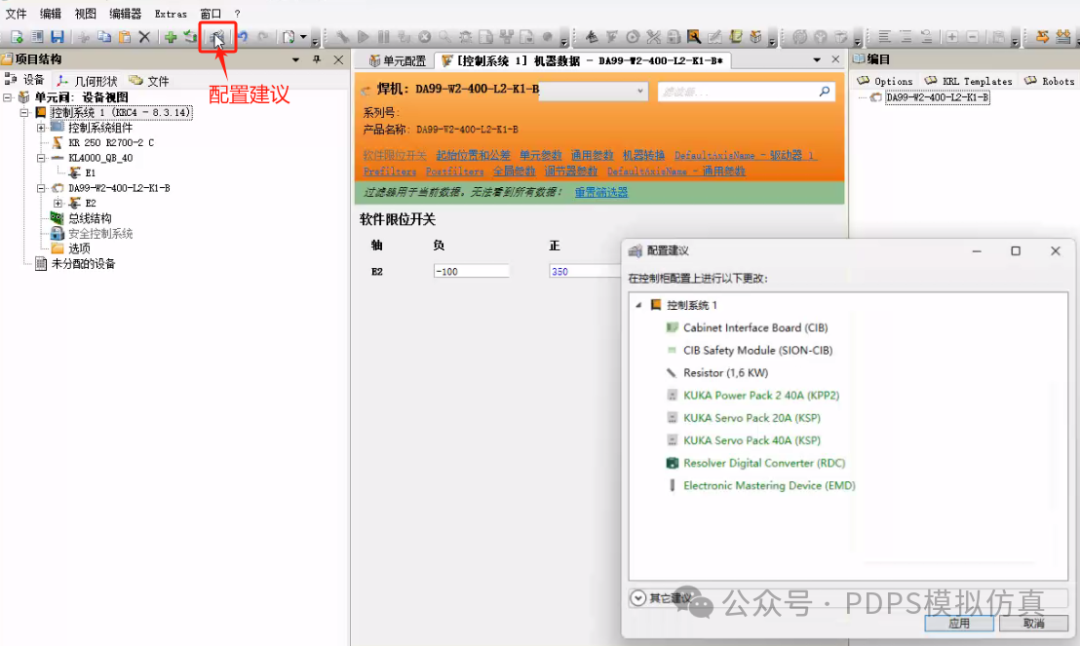
STEP8:选中控制系统1,点击配置建议,点击应用
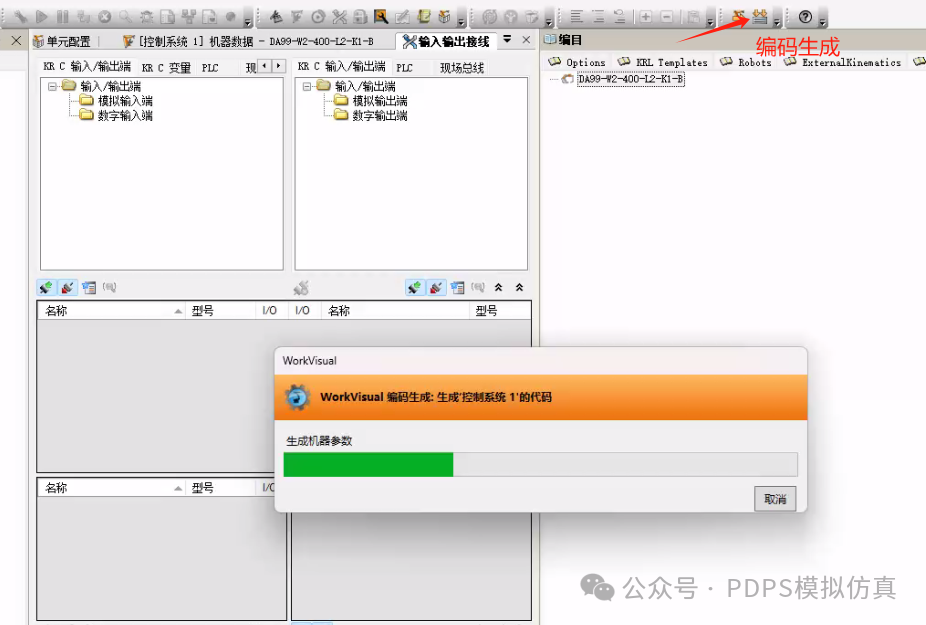
STEP9:点击编码生成按钮,系统会自动配置
STEP10:文件-Import/Export-导出文件-选择文件的目录即可
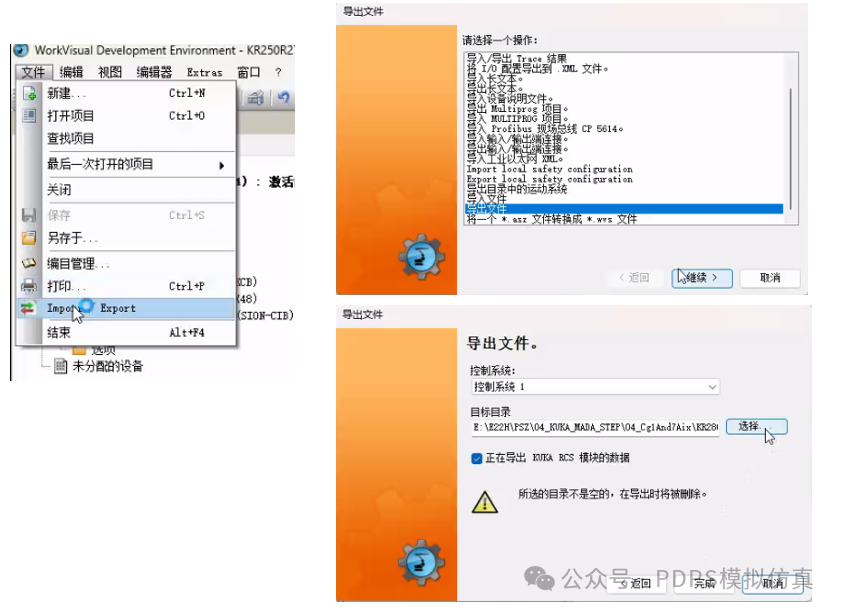
如下:
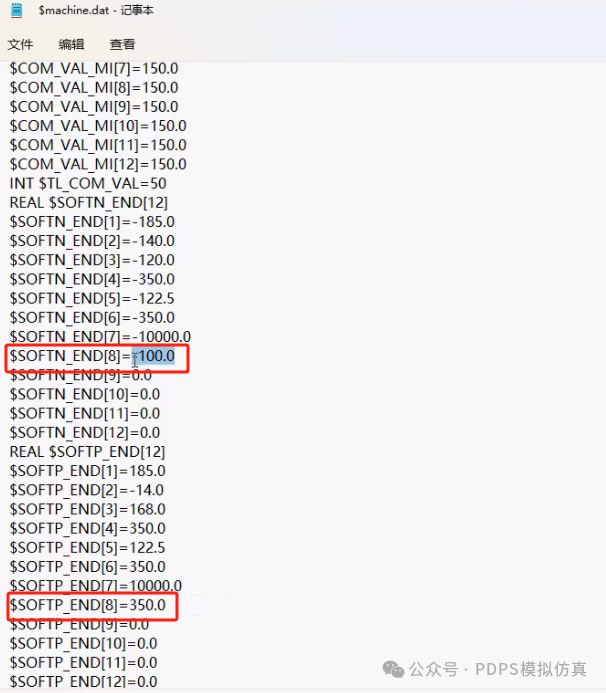
STEP11:检查mada,打开.DAT文件,查看焊枪伺服值在所设置范围内
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
113文章
16508浏览量
179956 -
控制系统
+关注
关注
41文章
6678浏览量
111016 -
KUKA机器人
+关注
关注
4文章
143浏览量
9216
原文标题:KUKA机器人的Mada文件怎么配置?
文章出处:【微信号:PDPS-ROBCAD,微信公众号:PDPS模拟仿真】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
库卡KUKA机器人四种启动方式介绍
库卡KUKA机器人四种启动方式1)自动运行说明 库卡机器人处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换机器人到自动运行状态,给
发表于 09-04 15:45
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于
发表于 09-08 16:30
KUKA焊接机器人伺服电机常见故障及维修处理
KUKA焊接机器人伺服电机常见故障及维修处理1、库卡机器人伺服电机的基本检查由于库卡机器人伺服电机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,在对库卡
发表于 09-26 16:51
工业机器人组成结构相关资料分享
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已
发表于 07-05 06:44
库卡机器人MGV电源模块维修
KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模块维修 库卡控制器维修 KUKA电源维修KU
发表于 09-08 07:30
机器人系统与控制需求简介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(
发表于 09-08 07:44
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59






 工商网监
工商网监
评论