 康谋分享 | aiSim5 物理相机传感器模型验证方法(一)
康谋分享 | aiSim5 物理相机传感器模型验证方法(一)
摘要:
aiSim5可以实时模拟复杂的传感器配置,在多GPU分布式渲支持的支持下,aiSim可以渲染20多个摄像头、10多个雷达和10多个激光雷达在同一环境下运行。aiSim5独有的实时渲染引擎能够满足对物理精确环境和天气模拟的所有要求,具有完全的决定性和可重复性。
 图1:aiSim 重建场景
图1:aiSim 重建场景 图2:真实场景
图2:真实场景aiSim5基于物理的相机模型将会通过以下方法验证其与真实世界的相关性:
一、光照度测试
aiSim 拥有内置的光照度传感器,因此可以使用光照度传感器对aiSim的照明模型和材质进行端到端的验证。
1、案例1
在 aiSim 中重新模拟一个高速公路场景,并匹配相应的天气效果。
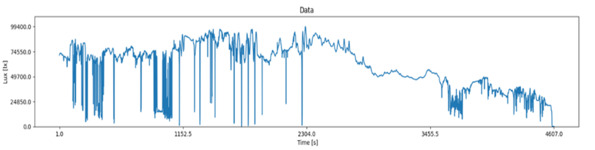 图3
图3目前正在 aiSim 中重建这一场景并测试这一光照度测量结果。
2、案例2
验证人工照明模型以及aiSim车库地图的相关性时,可以在车库使用匹配的光照属性进行重新模拟,aiSim 中会产生相似的结果。
 图4:真实世界中进行传感器标定的场景
图4:真实世界中进行传感器标定的场景 图5:aiSim中搭建的用于相机标定车库场景
图5:aiSim中搭建的用于相机标定车库场景二、色彩校准测试
1、简介
在进行相机图像匹配时,使用Color Correction Matrix (CCM) 是一种有效的方法,可以通过对已知相机拍摄的参考照片和aiSim渲染的Macbeth色板图表进行比较来计算CCM。
 图6
图6 图7
图72、具体步骤
- 准备参考照片:首先,需要一张使用已知相机拍摄的Macbeth色板的照片。Macbeth色板是一个标准化的颜色样本集,通常用于色彩管理和校准。
- 获取aiSim渲染的Macbeth色板:接着,你需要在aiSim中创建一个Macbeth色板的渲染图。确保渲染环境的光照条件与参考照片尽可能一致,以便更准确地匹配颜色。
- 应用CCM:计算出CCM后,aiSim可以将其应用于aiSim的图像输出,进行颜色校正。
- 验证和调整:应用CCM后,比较aiSim输出的颜色与参考照片的颜色。如果存在差异,可能需要进一步调整CCM的参数或重新计算,直到达到满意的匹配效果。
通过这种方法,可以确保aiSim的输出颜色与实际拍摄的照片颜色尽可能一致,从而提高图像的真实性和准确性。
三、离线仿真器验证
1、简介
也可以采用基于物理的渲染(PBR)离线渲染器进行比较。
2、具体步骤
- 构建相同样本场景:在aiSim和参考渲染器中构建相同的样本场景。这包括场景中的所有物体、材质、光照条件等,以确保两个环境中的变量尽可能一致。
- 使用相同的相机参数:使用相同的相机外部参数(extrinsic)和内部参数(intrinsic)来拍摄场景。外部参数涉及相机在世界空间中的位置和方向,而内部参数则包括焦距、畸变等相机特有的属性。
- 进行HDR或LDR验证:无论是高动态范围(HDR)还是低动态范围(LDR)验证,都可以用于比较两个渲染器生成的图像。选择哪种验证方式取决于场景的光照条件和所需的验证精度。
- 比较生成图像的差异:对aiSim生成的图像和参考渲染器生成的图像进行比较。可以通过视觉检查或使用图像分析工具来量化差异,如计算颜色偏差、亮度对比度等。
- 多场景验证:通过多个不同的场景来验证系统的不同部分,例如只验证人工光源,或者只验证天空和太阳的效果等。可以帮助识别和隔离特定问题,提高验证的针对性和效率。
以上方法均适用于验证aiSim相机传感器模型与现实世界或高精度的离线渲染器的相关性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2554文章
51649浏览量
758075 -
自动驾驶
+关注
关注
786文章
13977浏览量
167510 -
汽车自动驾驶
+关注
关注
0文章
11浏览量
3767
发布评论请先 登录
相关推荐
康谋方案 | 基于AI自适应迭代的边缘场景探索方案
测试 ADAS/AD 系统时,传统 DoE 方法难以覆盖驾驶边缘场景,影响自动驾驶性能提升。康谋 aiSim集成的aiFab方案,以贝叶斯优化为核心,依据碰撞时间等关键指标,快速定位高
激光位移传感器的校准方法
激光位移传感器的校准方法主要包括以下步骤: 一、准备阶段 设备准备 : 激光位移传感器 标准位移装置(如标准振动台或精密滑轨) 数据采集系统 读数显微镜(或激光干涉仪等高精度测量设备,
Sony偏振传感器加持 Blackfly S工业相机突破视觉成像反光难题
Q为什么采用传感器偏振?A:视觉系统一直都在试图克服玻璃、塑料和金属等反光表面产生的动态或多余光线、反射、朦胧和眩光影响。TeledyneFLIR的BlackflyS机器视觉工业相机具有Sony

康谋技术 | 毫米波雷达技术解析
自动驾驶技术飞速发展,毫米波雷达已成为自动驾驶传感器套件的关键。为此,康谋为您深度解析毫米波雷达技术,从概述到工作原理,再到前沿的4D技术,全面揭示其在自动驾驶中的重要作用。快来了解,一

康谋分享 | 汽车仿真与AI的结合应用
实现高质量的虚拟传感器输出是自动驾驶领域的一项关键挑战,然而传统方案对广角镜头的渲染和处理等方面仍存在一定的局限性。为此,康谋为您介绍

电感传感器能够测量哪些物理量?
电感传感器是一种利用电感效应来检测物理量的装置,它将被测量转换为线圈的自感或互感的变化来测量。电感传感器能够测量的物理量相当广泛,主要包括但
康谋技术 | 自动驾驶传感器标定技术:从单一到联合标定
进行标定以获取各个传感器的安装位置。具体来说,就是通过标定确定车身坐标系下传感器的位置。SensorCalibration传感器标定类型在一辆具备L2+级别智驾车上

康谋分享 | 自动驾驶联合仿真——功能模型接口FMI(三)
功能模型接口是一个开放且独立于工具的标准,便于实现自动驾驶仿真工具间的模型交换和联合仿真。本文以康谋ai

温度传感器的常见故障及处理方法
温度传感器是工业和日常生活中非常重要的设备,用于测量和监控温度。以下是一些常见的温度传感器故障及其处理方法: 传感器读数不准确 : 原因 :
康谋分享|aiSim5基于生成式AI扩大仿真测试范围(终)
在场景重建和测试流程闭环的过程中,难免会面临3D场景制作重建耗时长、成本高、扩展性低以及交通状况复杂程度难以满足等问题。康谋aiSim中NeRF和3DGS可以自动化生成3D静态场景并添加动态实例编辑,从而缩短测试流程,扩大仿真测

康谋分享 | aiSim5仿真场景重建感知置信度评估(三)
aiSim5能重建高精度的赛道、车库、高速公路等真实交通场景,用于测试和训练ADAS/AD系统。通过全局行动日志,能将驾驶数据转化为场景重建,车道线检测算法和多目标检测算法在仿真与现实世界的相关性测试中误差极为相近。

康谋分享|aiSim5激光雷达LiDAR模型验证方法(二)
aiSim中的LiDAR是一种基于光线追踪的传感器,能够模拟真实LiDAR发射的激光束,将会生成LASv1.4标准格式的3D点云,包含了方位角、俯仰角和距离等。aiSim能够模拟LiD

康谋技术 |深入探讨:自动驾驶中的相机标定技术
算法之间,是确保传感器数据准确性的基础,同时也是实现传感器融合的关键先决条件。在众多传感器中,相机以其丰富的信息获取能力和成本效益而成为自动驾驶系统中的首选。

指纹传感器的定义 指纹传感器的应用
指纹传感器的定义 指纹传感器的应用 指纹传感器是一种生物识别技术,通过检测和分析人体指纹特征来验证用户身份。它基于指纹独特性和稳定性的基本





 工商网监
工商网监
评论