 如何为你的应用选择UWB的拓扑结构?
如何为你的应用选择UWB的拓扑结构?

UWB系统考虑因素回顾
在本节中,我们来简要介绍一下UWB的系统组件,以及硬件和软件选择如何影响系统的性能。
锚点和标签
要了解UWB系统,您需要理解锚点和标签这两个术语。锚点通常就是固定的UWB设备。标签通常是指移动的UWB设备。锚点和标签可交换信息,以便确定两者之间的距离。标签的确切位置可通过与多个锚点通信来确定。
一些设备即可作为锚点,也可作为标签。例如,当两个移动手机使用UWB来计算相互之间的距离时,它们可以在计算过程中转化角色,交替地用作标签和锚点。
存储单元和处理能力
典型的UWB设备需要具备一定程度处理能力和特定功能。对于简单的标签,要求处理器具有少量的闪存(可编程非易失性存储器)和数据存储器(易失性随机存取存储器,或RAM)。对于锚点应用,比如到达时间差(TDoA)中使用的锚点,可能需要具有更多闪存和RAM的处理器,在许多情况下还需要数据回传。
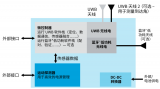
图1显示了标签(具有运动检测)或锚点(具有回传接口,如以太网或Wi-Fi接口)的常见架构。对于锚点,可能需要不同类型的处理器,具体取决于系统规模和工作负载/吞吐量需求。
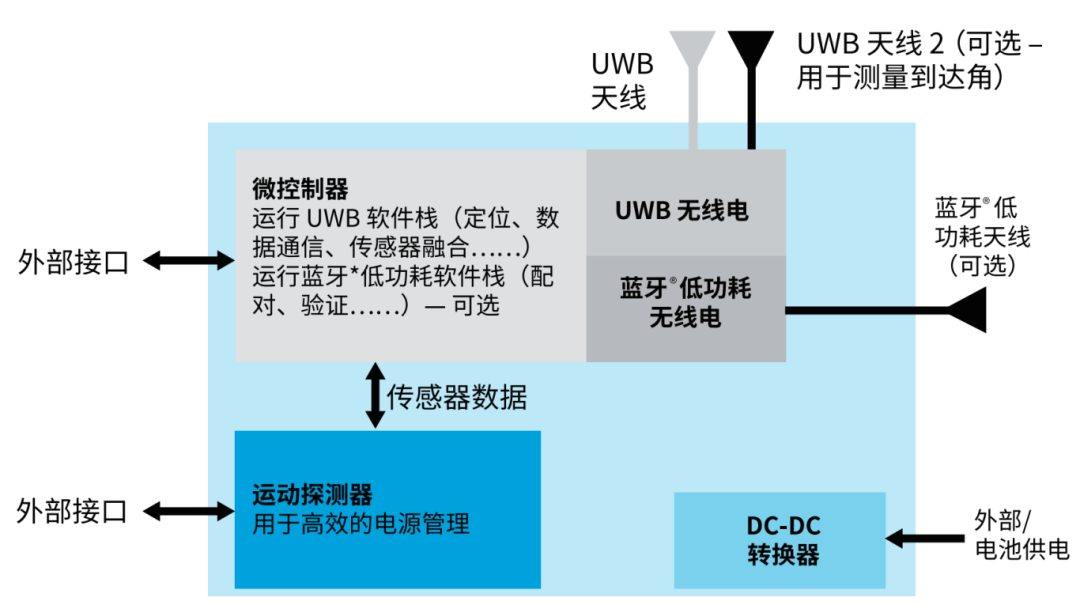
图1:典型的UWB架构(锚点和标签)
另一个系统考虑因素就是天线。不同的应用会需要不同的天线。例如,标签通常使用小型全向性天线。锚点则可能要使用定向天线,具体取决于拓扑结构。
软件栈
UWB通信组件和应用之间的重要互连就是UWB软件栈,如图2所示。软件栈有助于协调与外部设备的互操作性和共存。此外,软件可实现UWB通信组件和内部微控制器之间的通信。例如,在控制智能手机和汽车之间的连接时,软件负责协调通信。
软件还可以同时管理多个应用和用例。例如,某个解决方案可能是控制扬声器、照明装置、加热系统等智能家居生态系统的组成部分。它可以与所有UWB标签和UWB支持设备通信,同时利用位置信息控制环境、锁门和开门、启用和禁用报警系统等。UWB软件栈可同时处理所有这些不同的情况。
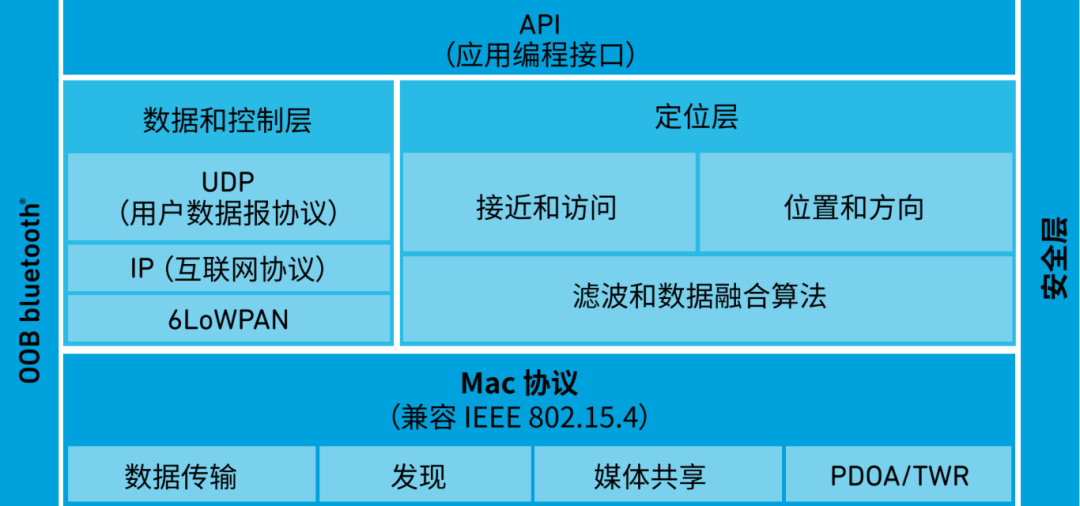
图2:Qorvo的UWB软件栈示例
使用UWB软件栈可确保UWB通信组件满足不同应用的需求。此外,从最终用户和整体系统设计角度来说,利用该软件的许多功能可以让事情变得更简单。
功能优先级排序
在一些应用场景下,不同功能需要进行优先级排序。例如,假设在某个应用中,电源管理和电池使用寿命很重要,比位置更新速率或数据吞吐量更重要。在这种情况下,可使用软件优化功耗,将设备设置为不用时关闭,需要通信时开启。
另一种情况就是,传感器LOS信号不理想或是来自不同的方向。此时,可使用软件将结果平均,以获得精确的距离信息;软件还可以平滑处理比其他信号更嘈杂的信号。为了获得更精确的结果(尤其是在快速移动应用中),或为了添加有关设备方向的信息,软件还可以将来自UWB芯片组的数据与来自惯性测量装置(包括加速计、陀螺仪和磁力计等)的数据整合在一起。
UWB拓扑结构比较和选择
UWB利用ToF的概念,这是一种通过将信号的ToF乘以光速来测量两个无线电收发器之间距离的方法。基于这个基本原理,可根据目标应用的需求以不同的方式实现UWB定位技术。
最佳拓扑结构主要由应用决定。这也就是说,设计工程师首先要将应用和拓扑结构匹配。可供选择的方法有:
双向测距(TWR):如图3所示,TWR方法可通过测定UWB射频信号的ToF,然后将该时间乘以光速来计算标签与锚点之间的距离。汽车无钥门禁系统就是使用TWR方法的一个应用示例TWR可生成一个安全空间,类似于一个安全气泡,同时确保在应用的时候,这个气泡保持高精度的安全控制。
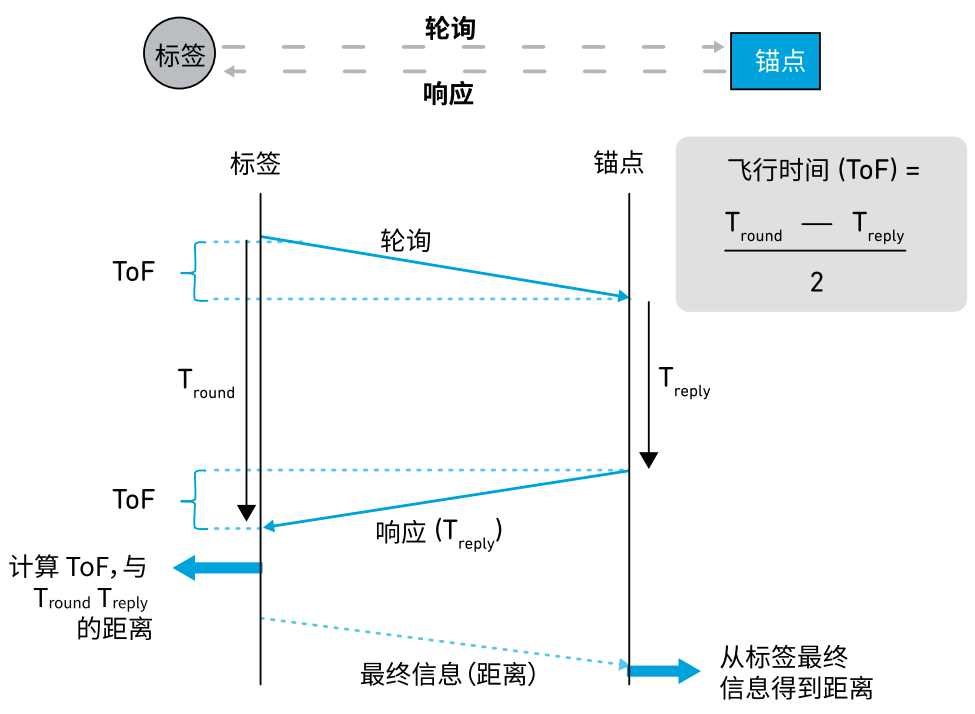
图3:在安全气泡中利用UWB标签和锚点计算安全距离
如果您在两个设备之间实施TWR方案,则可以获得设备之间的距离信息。在TWR方案的基础上,您还可以在移动标签和固定锚点之间实现2D甚至3D位置测量;称为“三边测量法”。
采用TWR方法,可交换三条消息。标签通过发送一条含已知锚点地址的轮询消息启动TWR。锚点记录轮询接收时间,并回复响应消息。在收到响应消息后,标签记录时间并编写最后一条消息。锚点可利用最后一条消息中的信息确定UWB信号的ToF。
TWR方法也可用于图4和图5所示的2D/3D资产场景。图4显示使用监听器的双向测距,而图5显示使用数据标签回程的TWR。如图5所示,数据回传可以使用多种方法(如Wi-Fi、NB-IoT、LTE-M等)实现,通过这些方法将数据传输至云。
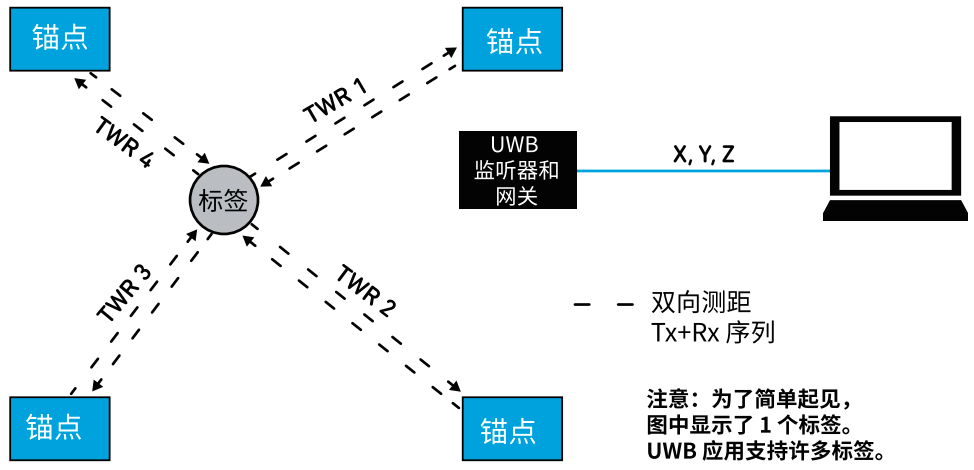
图4:具有2D/3D资产和监听器的TWR
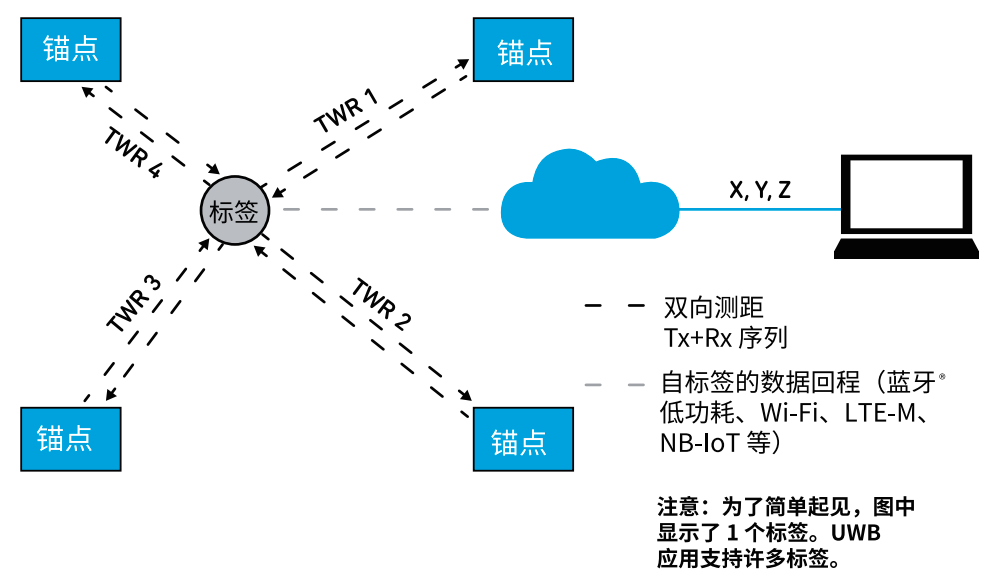
图5:具有2D/3D资产和数据标签回程的TWR
到达时间差(TDoA)和反向TDoA:TDoA和反向TDoA方法类似于GPS。在已知的固定场所部署了多个参考点,称为“锚点”,且这些锚点在时间方面实现了紧密同步。如果为TDoA,移动设备将闪烁(也就是定期发送信息),当锚点接收到信标信号时,将基于共同的同步时基标记时间戳。然后,多个锚点的时间戳将转发至中央定位引擎,中央定位引擎将根据每个锚点的信标信号TDoA运行多点定位算法。最后将得到移动设备的2D或3D位置,如图6所示。
反向TDoA更像GPS。在该系统中,锚点发送同步信标(具有固定/已知偏移,以避免发生碰撞),移动设备利用TDoA和多点定位算法来计算其位置,如图7所示。
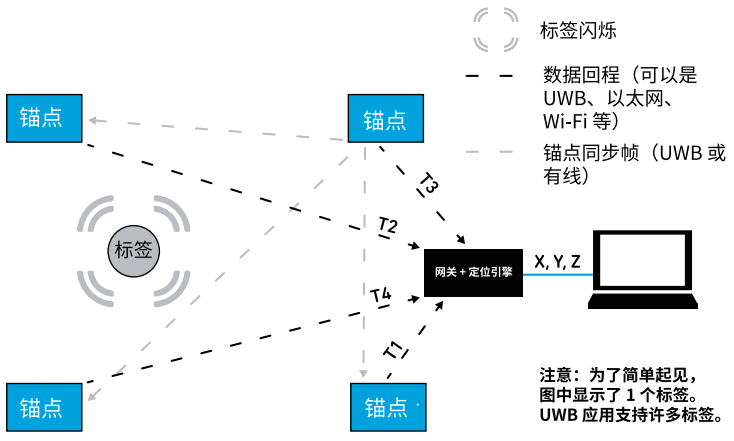
图6:TDoA
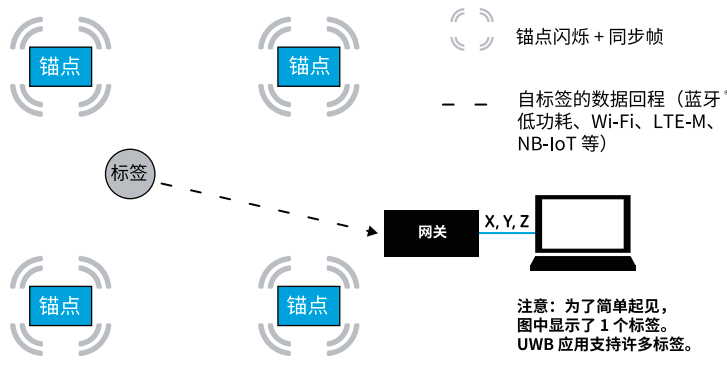
图7:反向TDoA
到达相位差(PDoA):另一个UWB拓扑就是PDoA。PDoA可将两个设备之间的距离与两者之间的方位测量结合在一起,如图8所示。利用距离和方位的组合信息,可在没有任何其他基础设施的情况下计算出两个设备的相对位置。为此,其中一个设备必须配备至少2根天线,并且能够测量每根天线处到达信号载波的相位差。相位完全不受天线变形的影响,并且可实现优于10°的测量精度,从而可以在不到5°的情况下确定发射器的方位。
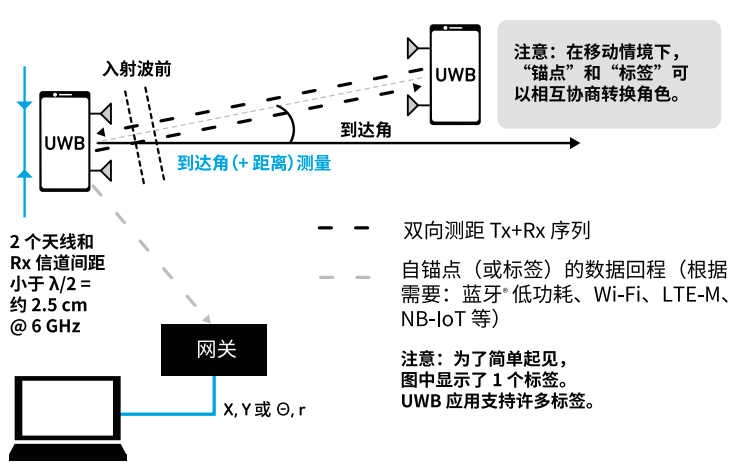
图8:PDoA定位导航服务
对于每种拓扑结构,分别最适合哪种应用?这些用例主要侧重于三个不同的领域:感应式门禁、定位服务和设备对设备(点对点)应用。图9详细介绍了TWR、TDoA、反向TDoA和PDoA拓扑结构的最佳应用。
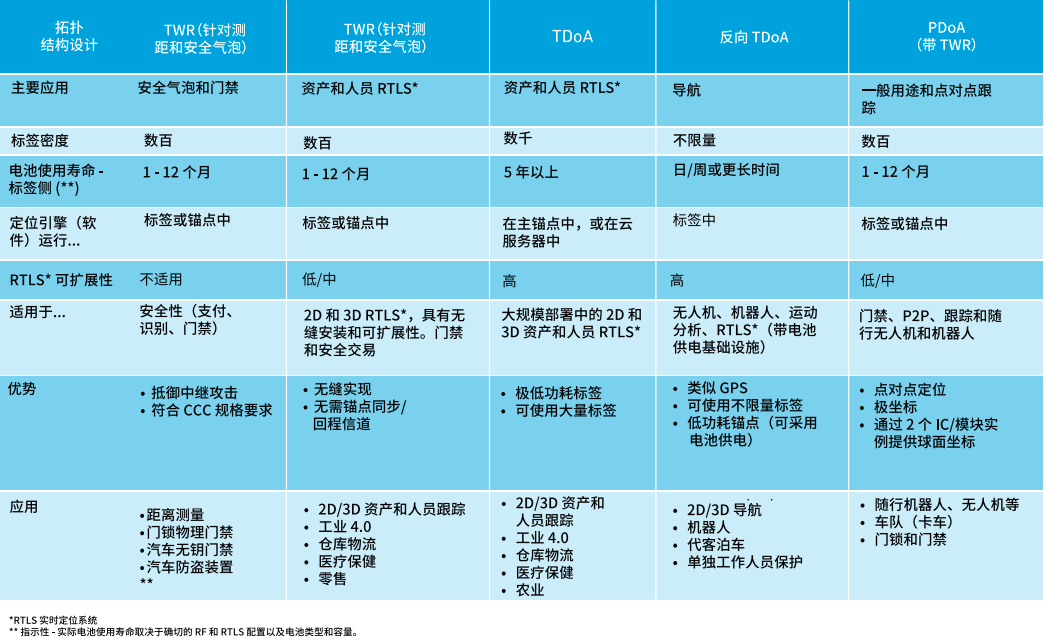
图9:常见UWB技术的理想应用
-
处理器
+关注
关注
68文章
20360浏览量
255481 -
拓扑结构
+关注
关注
6文章
333浏览量
41303 -
UWB
+关注
关注
33文章
1307浏览量
65547
原文标题:如何为你的应用选择UWB的拓扑结构?
文章出处:【微信号:射频美学,微信公众号:射频美学】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
选择拓扑结构主要要考虑哪里方面?总结如何选择拓扑
案例分享之DDR拓扑结构的选择
不同的充电拓扑结构介绍
合适的CAN总线拓扑结构如何选择?
开关电源拓扑结构如何选择?
如何选择DDR的拓扑结构?怎样去改善信号质量呢?



评论